|
|||
INTECO_3DCrane用于桥式起重机二自由度摆角模型与仿真
型号: PXF1018

起重机的小车和吊重之间常采用柔性钢绳联结,可减少起重机的动载荷,提高起重机吊运货物的灵活性,降低系统的功率消耗,但加大了起重机吊重的摇摆,增加了起重小车准确定位的难度,降低了系统的工作效率,将高度非线性模型进行线性化处理,研究吊重摇摆的规律和影响因素,为防止摇摆控制研究提供理论依据。
对小车吊重系统进行了平面动力学分析,建立了二维动力学方程.实际上吊重在起重机三维空间服务区域内在3个方向上移动,其小车吊重系统几何简化模型如图1所示.xyz为惯性坐标系.设吊重质量为m,小车质量为M,两者用绳长为l(不计质量)的柔性钢绳相连.吊重可沿z轴方向升降,小车带着吊重沿x轴方向运行,大车带着吊重、小车沿y轴方向运行.θ为吊重的二自由度摆角,θx和θy分别为θ在xz平面和yz平面的投影.令:fx,fy分别表示小车和大车沿x轴和y轴方向对小车吊重系统的驱动力;fl表示钢绳的张力.设小车位置的坐标为(x,y,0),吊重m在该坐标系中的位置(xm,ym,zm)满足由第二类拉格朗日方程得到的小车吊重系统。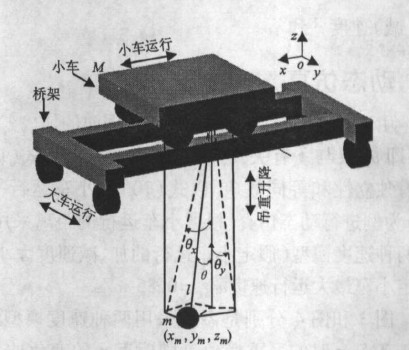
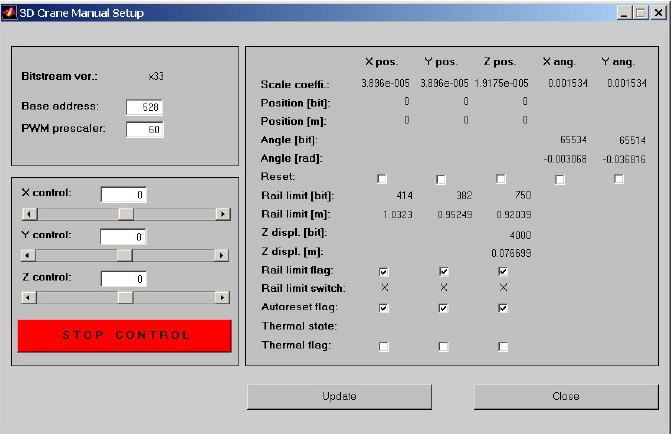
用INTECO桥门式起重机实验平台对小车吊重三维系统动力学方程建立的吊重的二自由度摆角的简化模型进行仿真验证,并通过小车
近距离运行和远距离运行两种速度模型对小车吊重系统进行动态仿真分析,着重分析了吊重绳长和小车加(减)速度与摇摆参数(吊重摆角、摆速和摆动频率)之间的关系.仿真结果表明:当小车加(减)速度增大1倍时,吊重摆角约增大0. 12 rad、摆速约增大0. 164 rad/s;当绳长增加2 m时,摆角和摆速无明显变化,吊重自由摆动的周期约增加1. 3 s.
url: http://www.51lm.cn/p/templates/cn/show.php?cid=905&aid=1018
