|
摘 要 文章介绍了基于现场总线LED立面照明的智能控制系统。该系统通过采用RS-485现场总线技术对立面照明实现编辑和控制。文章阐述了系统各组成部分的功能和实现方案,重点介绍了自定义的通信协议以及主站控制软件的构件设计。
关键词 RS-485 串口 灯光 LED
1 前言
目前,在我国各大城市地标性建筑物的夜景立面照明中,已开始大量运用节能、响应快、色彩艳丽的LED光源,除节能外,从夜景效果来看,可控制性强。变化丰富是LED光源与传统光源的最区别。因此,开发先进、可靠的控制系统成为发挥LED光源优势的关键。
从国内的应用状况来看,目前市场多采用两种控制方式:内控与外控,应用还主要集中在简单的色彩变换上。因此,采用两种控制方式的LED项目与采用传统光源的项目相比,都存在同一个问题:照明效果的固定性。这种现象与LED产品的长寿命、多色彩、高响应度等特点相违背,不利于发挥LED的优势,严重影响了LED的推广。因此,我们以为,设计开发新型的控制方式,使LED夜景画面可随时更新,将极大地推动LED产业的发展。
笔者通过对国家新材料行业生产力促进中心于2005实施的课题《半导体照明应用示范工程》中新型“LED灯光控制系统”的简要介绍,对该系统在设计过程中所涉及到的若干问题进行讨论,并从系统构架设计、通信协议设计、软件构架设计三个方面重点讨论此模式的特点及设计要点。
2 系统构架设计
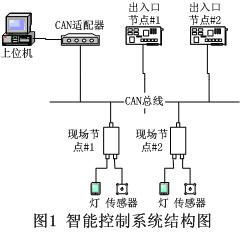
LED智能灯光控制系统是基于RS-485通信技术的现场总线,通过自定义通信协议在总线上外挂各类型控制器,并由主控统一管理的主从式总线型照明控制系统。它包括主控层、通信层、及LED灯具层,系统层次结构如下表所示。
其中,主控层负责效果编辑、分析、存储、数据打包分配,从照明效果参数的设定和修改,到数据的查询,实现对LED灯具的管理;通信层通过自制定的通信协议与LED灯具层及主控层进行通信,完成数据拆包、校验、数据再分配等多步骤的数据处理;LED灯具层由N个灯具组成,核心为Inter C51单片机组成的数据处理系统。系统拓扑结构如图1所示。
通过工控PC机上的控制软件,并利用主、从站的MCS-51类型的单片机作为通信控制器。三层之间通过RS-485现场总线进行物理链路连接,通过由主站线程调度实现从站轮巡时间取得划分,实现在特定时间片内主到灯具XX之间的点对点通信。
3 通信协议设计
通信协议的设计是系统设计的关键性问题,其信息帧的格式设计、链路建立方式、校验方法等设计都影响到系统的实时性与可靠性。下面就地址识别、帧设计、数据包设计、以及通信链路过程四个关键方面进行讨论。
3.1 地址识别
地址识别可以采用数据包过滤的软件识别或采用特定硬件地址识别。地址识别方法的确定和软件识别算法的设计,将严重影响系统的正确性和可靠性。两种方法的选用,取决于系统的实时性要求和系统采用的硬件结构。
本系统中所采用的MCS-51处理器专门为多机通信设计了一个专用SM2位,为此可以利用硬件识别,实现基于地址/数据帧的多机通信。
3.2 数据帧的设计
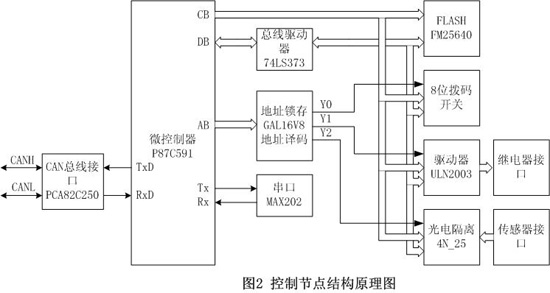
本系统中按照以下格式发送。前8位为起始字节,接着为地址字节,接着为命令/数据字节,校验字节,最后为停止字节。帧格式如图2所示。
此系统中的数据帧分为三部分:广播帧、地址帧。数据帧。广播帧是主控发给所有从控的信息帧,其实也可以归纳到地址帧内,但此时地址为广播地址,主要用于系统参数设置,时钟同步时用于检测计算延时等;地址帧的设计是用于地址识别和应答,一个主控可控制255个类别控制器,一个类别控制器又可以驱动255个LED灯具。数据帧主要是完成命令传送,参数传输等功能。
3.3 数据包的设计
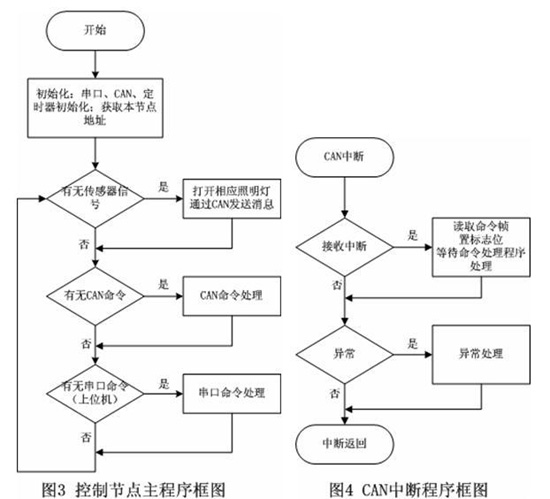
数据包的设计包括帧的组织方式,各种功能码设计、校验码设计以及数据设计问题。数据包格式如图3所示。功能由上下位机根据所需传输的参数类型、个数,以及系统对下位机功能设置情况而进行约定,有特殊字符代表特定的功能码如图4所示。
其中校验码的生成取决于系统所采用的协议,在某一具体场所可以通过现场设置来选择。本系统采用的CRC校验码,生成多项式采用CRC-16,该多项式能全部检查出16位及以下的错误,对16位以上的漏检概率0.003%,完全满足系统的要求。
3.4 通信链路的过程
由于现场环境复杂,该系统必须具有较好的抗干扰性。为了保证总线信号的传输不会出现延时、地址信号出错、指令信号跑飞等情况发生,通信采用主从应答方式和精确划分时间段的通信轮巡方式。通信链路主要过程如图5所示。主控首先发送类别控制器的地址帧作为握手信号,被寻址的类别控制器应答主控,建立链接。在判断地址符合后,主控就按照命令向从控制器传输适合的数据。
4 软件构架设计
主控制软件采用模块化构架设计。通过灵活的软件构架设计、合理的功能模块设计来实现系统图形编辑的处理及管理。主站软件是在Windows2000、VC++6.0以及FLAH MX的环境下开发而成的。下面就软件构架的层次模型进行分析。
控制软件系统构建的层次模型分为三层:界面交互层、数据处理层、数据传输层。
在模型中,界面交互层为友好的主人机交互界面,它向用户提供整套系统的运行情况、控制器的运行情况、灯光效果编辑、系统参数的设定。数据处理层是交互层和传输层的桥梁,该层根据上层的设定,进行相关数据信息的处理,并将下层反馈数据进行处理后传送到交互层。传输层将通过数据协议、组织成帧、打包,通过通信物理层发送给主控制器,并继续分配数据。
5 结束语
本控制系统是一种基于RS-485现场总线的LED夜景照明控制系统。一方面,该系统提升了夜景照明设计的水准、延长了灯具的使用寿命;另一方面,由于该系统的模块构件实现了一定的通用性和复用性,对中小型企业具有较好的经济适用性。
免责声明/版权申明 Passiontech
所有文章为网上搜集或私下交流学习之用,任何涉及商业盈利目的均不得使用,否则产生的一切后果由您自己承担!
本站仅仅提供一个观摩学习的环境,将不对任何资源负法律责任。所有资源请在下载后24小时内删除。
若无意中侵犯到您的版权利益,请来信联系我们,我们会在收到信息三天内给予处理!
| 
 400-878-1895
400-878-1895