|
Realtime of Hardware & Network- EtherCAT
Unique
Ø Protocol Hardware integration in the slave
Ø Direct memory access to the network controller in the master
Independent
Ø Dependent on its Own hardware and protocol stacks
Ø Independent from the CPU performance or software implementation.
The update time
Ø 256 I/Os 11us
Ø 1000 I/Os 30 µs
Ø 1486B process data 300 µs, equivalent to 12000 DI & DO.

EtherCAT Instead of PCI
■ For PCI
Ø more IOs need more Slots
Ø The physical size of Industrial PCs restraints its IO scale
■ For EtherCat
Ø Controller Only has CPU and Common Ehternet interface
Ø Controller can be smaller
Ø Decentralized IO,axes and control units,complex system,geteways and other communication interface can be easily used
|

Pic: EtherCAT Leads to Smaller Controller |
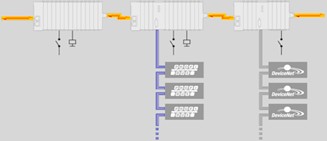
Pic: Decentralized Fieldbus Interfaces
|
|
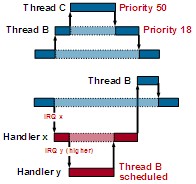
Realtime of Software&OS- QNX
■Multiple concurrent
scheduling algorithms
FIFO, Round Robin, Sporadic
■Prioritized pre-emptable threads
256 priority levels
Fully pre-emptable and
deterministic kernel
■Prioritized and nested interrupts
Interrupt handlers can schedule
a user thread or run custom interrupt code |
 |
|

