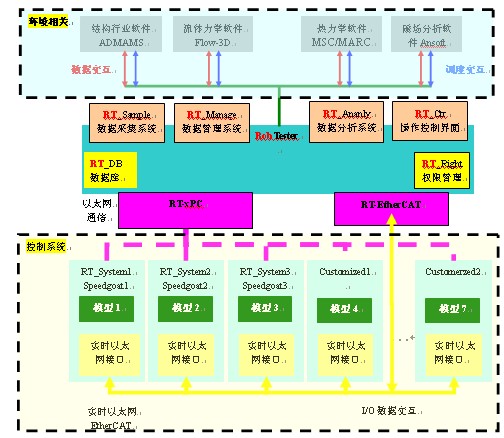
图:分布式仿真系统构架框图
系统分为2大部分:
(1) 控制系统的实时仿真
其中,实时仿真目标机,采用的是基于Matlab环境下的建模和仿真。通过Speedgoat提供的现成的xPC的仿真系统。在实时系统中主要运行的是控制系统相关程序。
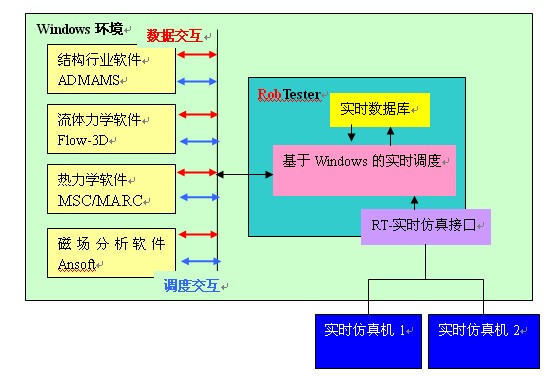
(2) 环境相关多学科联合联合监控系统
在准实时系统中,主要是针对被控对象的相关的特性仿真。通过仿真管理软件RobTester可以实现多学科软件和实时仿真系统之间的信息交互。
RobTester可以将多学科仿真软件产生的参数信息等发送给相应的控制系统中。
另外RobTester也可以将控制系统相关的信息通过任务调度等方式和多学科仿真参数交互。
针对上面的系统可以做如下应用:
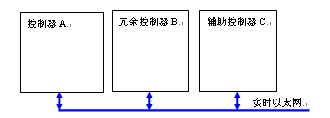
(1)处理器分模块快速原型
可以通过组合系统分别仿真不同的系统联合工作的情况。其可以仿真在不同处理器上运行的控制程序如何和其他的控制器,冗余控制器等交互。已经与其他的需要通信交互的系统之间的交流工作。
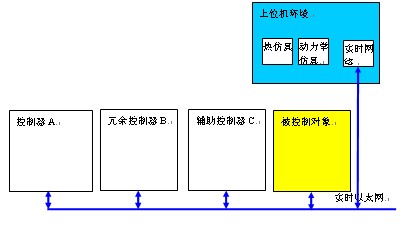
(2)处理器原型+被控对象实时仿真
在原有的仿真系统的基础上,可以加入被控对象的仿真系统,这样就可以实现控制器和被控制对象的实时仿真。
通过实时仿真,可以观测相应的实时情况下的被控对象和整个控制系统的整体功能。
(3)处理器原型+被控对象实时仿真+多学科仿真
在原有的多处理器+被控对象基础上,我们可以加入相应的多学科仿真功能。通过多学科仿真功能,可以将相应的热力学仿真,动力学仿真等相应的结果导入到实时仿真中。
(1)控制器被控对象组合
系统由多个目标仿真机构建成一个模块化组合式的实时仿真系统平台,每一套仿真机都相当于是一个组件模块。用户可以对每一个仿真机模块进行自定义配置,可任意配置为控制器模型或者被控对象模型,或者构建硬件冗余,从而在开发设计阶段做到最完整的验证测试。因此用户可以选择采用这一系统进行任意控制器仿真测试系统的组合和搭建,并可以在后期继续拓展仿真系统网络。
在模块化组合式的实时仿真系统结构上,可以进行控制器组态应用。在控制器设计过程中会将控制器分解成不同的功能部分。利用控制器组态进行实时仿真,可以使用不用的多个仿真机来运行控制器的各个不同功能模型,从而对设计过程中的模块环节进行验证和测试。而且,进行组态的多个仿真机也可以联合进行整体控制器验证和测试。是一种高效、灵活的实时仿真方式。
xPC Target是Matlab提出的应用于快速原型设计(RCP)和硬件在回路(HIL)的一个完整的、高效的解决方案。其包括完善的库支持、高性能的目标仿真机、实时内核、以太网的分布式应用、多仿真机支持等等。可执行Simulink与Stateflow的模型,并且可以通过Simulink下的HDL Coder对xPC Target系统中的FPGA板卡进行编程以实现特殊功能应用。基于以太网的分布式应用是模块化组合式仿真的强大基础。
EtherCAT是一种实时工业以太网现场总线,其拥有分布式时钟、高速通信、时间戳、任意的网络结构和几乎无线的网络拓展等特点。应用EtherCAT技术建立仿真设备的I/O端子,不仅可以完成仿真机间的数据共享,同时利用分布式时钟还可以完成高同步性能的数字I/O模拟。此外高性能的现场总线还能够完成信号仿真的模拟和现场级别的数据采集,并且可以组建到以太网络中,充分增强了系统的后续可拓展性能。

 400-878-1895
400-878-1895