|
|||
INTECO_3DCrane用于桥式起重机防摆控制器的设计验证
型号: PXF1020

桥式起重机作为一种现代搬运机械,是现代工业生产和起重运输中实现生产过程机械化、自动化的重要设备。它广泛地应用于室内外工矿企业、钢铁化工、铁路交通、港口码头以及物流周转等部门和场所从事空中吊运和装卸任务。由于起重机在运行过程中,吊物因惯性或受到外部干扰(如:大、小车的加减速、起动和停车、风力)等影响,会使得吊物离开原有的平衡位置产生很大的摆动。这种摆动不仅使得吊物的装卸难以定位,降低了生产效率,而且还对周围的吊装人员和设备带来严重的安全隐患。因此在生产实际中桥式起重机往往是由经验丰富的专职司机人工操作。本文分析了桥式起重机在三维空间中的数学模型的仿真结果与INTECO三维起重机仿真实验台验证后,提出采用线性二次型最优输出调节器技术构造一跟踪控制器,以实现吊物的精确定位和消除游摆。
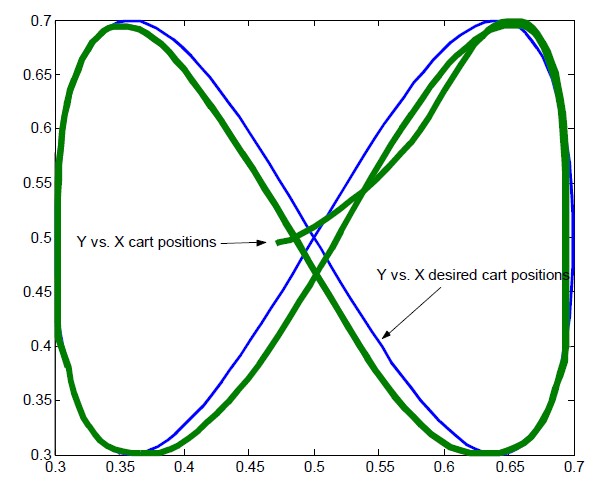
由于大、小车运动方程式实际上在y轴和x轴上已完全解耦,所以可以单独对大、小车的系统结构特性分别进行分析。在INTECO实验平台下进行实际测试。桥式起重机防摆控制问题实际上是一个跟踪控制问题,其控制目标是保证系统的输出量无静差地跟踪外部给定的输出量 。因此该问题很容易地能够转化为线性二次型最优输出跟踪控制问题,即设计一个最优输出跟踪器。按照线性二次型最优输出跟踪控制设计的桥式起重机防摆控制器完全能够满足任务要求,即小车运动系统在吊物的初始摆角α=0.1rad时,从初始值1m的地方运动到终止值10m的地方,小车能够在17秒钟内运动到终值,并且位移和摆角所产生超调完全在控制范围以内。这充分说明了最优输出跟踪器能够使得小车精确地停车并有效地消除吊钩的游摆。
INTECO的3D Crane在起重器各类控制和算法研究中,能起到非常快速验证算法和实际控制效果的作用,为研发和研究工作节省了大量的时间。并且自带的软件和分析工具可以有效的帮助研究人员快速解决问题。

url: http://www.51lm.cn/p/templates/cn/show.php?cid=0&aid=1020
