|
|||
CAN总线及其在武器装备中的应用
型号: PXF0192

CAN总线及其在武器装备中的应用
摘要 对于复杂的电磁环境,武器装备的电磁兼容性成为非常重要的问题。从技术层面看,总线技术是影响武器装备电磁兼容性的重要因素。传统的总线技术已经不能满足电磁兼容性要求,必须寻找和研究新的技术和方法。CAN (Controller Area Network)总线,即控制器局域网总线,是目前国际上应用最为广泛的现场总线之一。CAN总线是一种多主方式的串行通讯总线,有较高的位速率、很高抗电磁干扰性,而且能够检测出总线的任何错误。当信号传输距离达10Km 时,CAN 仍可提供高达50Kbit/s 的数据传输速率。文章针对复杂电磁环境下武器装备的抗干扰问题,论述了CAN总线的特点和技术规范以及在武器装备系统的应用。给出了节点电路和程序设计的流程图。
关键词 CAN总线协议 武器装备应用
0引言
对于复杂的电磁环境,武器装备的电磁兼容性成为非常重要的问题。从技术层面看,总线技术是影响武器装备电磁兼容性的重要因素。传统的总线技术已经不能满足电磁兼容性要求,必须寻找和研究新的技术和方法。
CAN (Controller Area Network)总线,即控制器局域网总线,是目前国际上应用最为广泛的现场总线之一。最初CAN 被设计作为汽车环境中的通信,在车载电子控制装置之间交换信息形成汽车电子控制网络。由于其卓越的性能、极高的可靠性和低廉的价格现已广泛应用于众多领域。也就成为武器装备中总线技术的首选。
CAN 协议是建立在OSI 七层开放互连参考模型基础之上的。但CAN协议只定义了模型的最下面两层——数据链路层和物理层,仅保证了节点间无差错的数据传输。CAN的应用层协议必须由CAN 用户自行定义,或采用一些国际组织制订的标准协议。应用最为广泛的是DeviceNet和CANopen,分别广泛应用于过程控制和机电控制领域。但此类协议一般结构比较复杂,更适合复杂大型系统的应用。
CAN总线是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率、高抗电磁干扰性,而且要能够检测出总线的任何错误。当信号传输距离达10Km 时CAN 仍可提供高达50Kbit/s 的数据传输速率。CAN 具有十分优越的特点:
(1)较低的成本与极高的总线利用率。
(2)数据传输距离可长达10Km,传输速率可高达1Mbit/s(距离40m时)。
(3)可靠的错误处理和检错机制,发送的信息遭到破坏后可自动重发。
(4)节点在错误严重的情况下具有自动退出总线的功能。
(5)报文不包含源地址或目标地址仅用标志符来指示功能信息和优先级信息。
1 CAN总线控制器和CAN总线驱动器
1.1 帧类型
CAN总线可以具有两种互补的逻辑值之一:“显性”或“隐性”。 “显性”位和“隐性”位同时传送时,总线的结果值为“显性”。比如,在执行总线的“线与”时,逻辑0 代表“显性”等级,逻辑1 代表“隐性”等级。
在CAN 总线中,有四种不同的帧类型:
(1)数据帧(Data Frame) 数据帧带有应用数据。其帧结构见表1。
(2)远程帧(Remote Frame) 通过发送远程帧可以向网络请求数据,启动其他资源节点,传送节点各自的数据。远程帧包含6个不同的位域:帧起始、仲裁域、控制域、CRC域、应答域、帧结尾。仲裁域中的RTR位为隐性表示为远程帧。
(3)错误帧(Error Frame) 错误帧能够报告每个节点的错误,由两个不同的域组成,第一个域是不同站提供的错误标志的叠加,第二个域是错误界定符。
(4)过载帧(Overload Frame) 如果节点的接收尚未准备好就会传送过载帧,由两个不同的域组成,第一个域是过载标志,第二个域是过载界定符。
1.2 数据帧结构
数据帧由以下七个不同的位域(Bit Field)组成:帧起始、仲裁域、控制域、数据域、CRC域、应答域、帧结尾。其标准帧结构如下表所示:
表1数据的帧结构
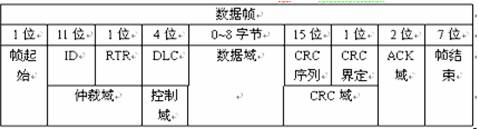
(1)帧起始:标志帧的开始,它由单个显性位构成,在总线空闲时发送,在总线上产生同步作用。
(2)仲裁域:由11位标识符(ID10~ID0)和远程发送请求位(RTR)组成,RTR位为显性表示该帧为数据帧,隐性表示该帧为远程帧。
标识符由高至低按次序发送,且前7位 (ID10~ID4)不能全为显性位。标识符ID用来描述数据的含义而不用于通信寻址,CAN总线的帧是没有寻址功能的。标识符还用于决定报文的优先权, ID值越低优先权越高,在竞争总线时,优先权高的报文优先发送,优先权低报文退出总线竞争。CAN总线竞争的算法效率很高,是一种非破坏性竞争。
(3)控制域:为数据长度码。(DLC3~ DLC0),表示数据域中数据的字节数,不得超过8;
(4)数据域:由被发送数据组成,数目与控制域中设定的字节数相等,第一个字节的最高位首先被发送。其长度在标准帧中不超过8个字节。
(5)CRC域:包括CRC(循环冗余码校验)序列(15位)和CRC界定符(1个隐性位),用于帧校验。
(6)应答域:由应答间隙和应答界定符组成,共两位。发送站发送两个隐性位,接收站在应答间隙中发送显性位。应答界定符必须是隐性位。
(7)帧结束:由7位隐性位组成。
1.3 CAN总线控制器
CAN控制器负责CAN 信息帧的收发和CAN 协议的实现。独立的CAN控制器一般由具有实现CAN总线协议的核、总线接口管理模块、数据发送和接收缓冲器、验收滤波器和寄存器组等构成,见图1。
接口管理逻辑负责同外部主控制器的接口,该单元中的每一个寄存器都可由主控制器通过地址/数据总线访问发送缓冲区,可存贮一个完整的信息帧。长度为13个字节主控制器可直接将标识符和数据送入发送缓冲区,然后置位命令寄存器CMR 中的发送请求位TR ,启动CAN核心模块读取发送缓冲区中的数据,按CAN 协议封装成一完整CAN信息帧通过收发器发往总线验收滤波器单元。完成接收信息的滤波,只有验收滤波通过且无差错,才把接收的信息帧送入接收FIFO 缓冲区,且置位接收缓冲区状态标志。表明接收缓冲区中已有成功接收的信息帧,接收帧的数量可通过访问接收信息计数器RMC 得知。
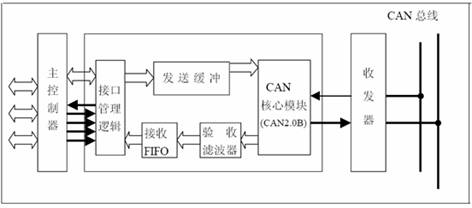
图1 CAN总线的组成
1.4 CAN总线收发器
CAN总线收发器,是CAN 控制器和物理总线的接口,提供对总线的驱动发送能力、对CAN控制器的差动发送能力和对CAN控制器的差动接收能力。CAN总线收发器具有很强的抗瞬间干扰和保护总线的能力。例如常用的总线收发器PC82C250有三种不同的工作方式即高速、斜率控制和待机,总线上的某一个节点掉电不会影响总线,在40米内应用的速度可达1Mbit/s,最多可挂110个节点。
1.5 CAN节点组成
图2 CAN总线系统智能节点组成电路图
图2是CAN 总线系统智能节点采用89C51 作为节点的微控制器的例子。在CAN 总线通信接口中采用SJA1000 和82C250 芯片。SJA1000 是独立CAN 通信控制器,82C250 为高性能CAN 总线收发器。6N137为高速光电耦合器。微处理器89C51 负责SJA1000 的初始化,通过控制SJA1000 实现数据的接收和发送等通信任务。为了增强CAN 总线节点的抗干扰能力,SJA1000 的TX0 和RXO 并不是直接与82C250 的TXD 和RXD 相连而是通过高速光耦6N137 后与82C250 相连,这样就很好的实现了总线上各CAN 节点间的电气隔离。
2 CAN在武器装备中的应用
火控系统是控制射击武器自动实施瞄准与发射的装备的总称。主要构成有:目标跟踪器、火力控制计算机、系统控制台 、射击控制仪 、接口设备 和必要的外围设备。 主要功能是:获取战场态势和目标的相关信息 、计算射击参数,提供射击辅助决策、控制火力兵器射击,评估射击效果。常见的有:舰面火控系统、航空火控系统、地面火控系统等。图3所示是火控系统的CAN总线系统结构。该系统结构最大的特点就是所有的节点都能以平等的地位挂接在总线上。CAN总线智能节点之间能够相互进行通信,以完成数据交换。一个智能节点通常至少包括三个部分,即负责节点任务控制的单片机、总线控制器及总线收发器。CAN智能节点主要完成的任务是:将相关数据传送给其它节点,同时从总线上接收本节点所需要的数据。实现了火控系统内部单体间通信的可靠性、实时性、灵活性。
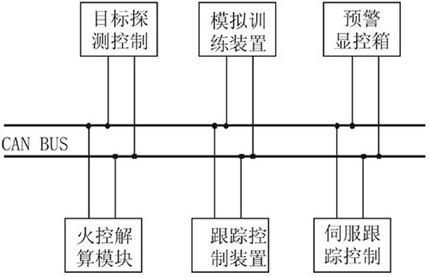
图3 火控系统的CAN总线系统结构
要求可靠性更高的系统可以采用双冗余系统通信总线。基于CAN总线的双冗余系统通信总线的基本设计思想是在各功能模块之间布下两条基于CAN的系统通信总线,即用两套CAN总线控制模块分别连接到总线bus0和bus1上。正常情况下优先在一条总线上通信,这条总线出现故障时通过另一条进行通信并重新初始化出错的总线以备将来再用。这样即使一条通信通道故障后不会影响整个系统的数据交换,大大提高了通信的可靠性。
发送模块采用主动发送方式,bus0为优先通讯通道,若bus0通道状态不正常,则启动bus1通道进行通讯,并对bus0通道进行初始化以备下次通讯时使用。
接收模块采用中断接收方式,为了保证接收到的数据被实时处理,CAN总线的接收中断被设置为高优先级中断。在接收中断中首先判断接收通道是bus0还是bus1,然后从接收通道按数据长度进行数据接收。
双冗余总线结构的通讯软件主要由初始化、接收和发送三个模块组成,控制流图见图4。在程序设计时采用了SJA1000的BASIC模式,初始化中需要对 bus0和bus1分别进行初始化,包括SJA1000的控制寄存器、接收代码寄存器、接收屏蔽寄存器、总线时序寄存器等。
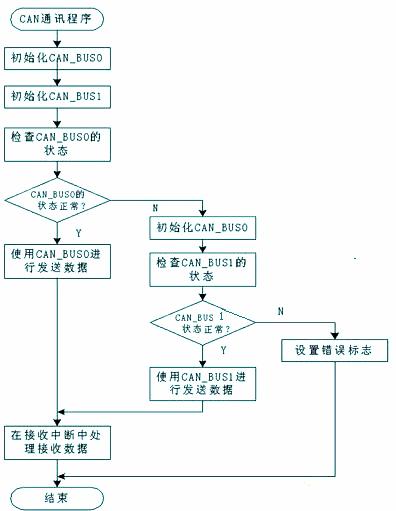
图 系统工作流程
3 总结
CAN总线是经过实践证明了的性能优良的串行总线系统。特别适用于强电磁环境下使用。CAN总线的协议简单,实现CAN总线的器件简单方便。已经在武器装备中开始应用。必将成为未来信息化武器装备的技术基础。
免责声明/版权申明 Passiontech
所有文章为网上搜集或私下交流学习之用,任何涉及商业盈利目的均不得使用,否则产生的一切后果由您自己承担!
本站仅仅提供一个观摩学习的环境,将不对任何资源负法律责任。所有资源请在下载后24小时内删除。
若无意中侵犯到您的版权利益,请来信联系我们,我们会在收到信息三天内给予处理!
url: http://www.51lm.cn/p/templates/cn/show.php?cid=80&aid=192
