|
|||
磁悬浮模型控制系统
型号: PXF2287
磁悬浮系统——无摩擦的电磁控制系统
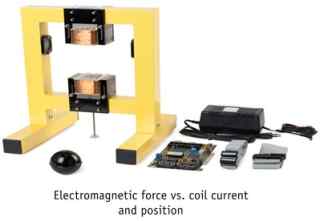
磁悬浮系统(MLS)是一个非线性、开环、不稳定的时变无摩擦动力系统。磁悬浮的基本原理是将电压加载到一个电磁线圈,产生磁力来保持磁铁球的悬浮。此外,磁球还可以在不同的时间进行设定位置的变化。通过线圈电流的测量来探测鉴定以及多回路或非线性控制策略。为了控制悬浮的磁球,必须要配备一个实时控制器。在平衡阶段的两股力量(重力与磁力)是由控制器来维持的,控制器需要保持磁球距离磁铁的位置。该系统完全集成在Matlab/Simulink下,并且可以在Windows下进行实时操作。对于两个磁体而言,较低的那个可用于外部激励或者收缩单元。这一特性拓展了磁悬浮系统的应用,这对于鲁棒性控制器的设计是非常有用的。
PC需要配备RT-DAC/PCI I/O板卡与电源接口。用户可以使用非常简单和快速的方式构建自己的控制器。升级后的系统使用磁通量测量的方式来替代原有红外位置检测。


硬件:
电磁体
磁球位置传感器
电流传感器
电源接口
RT-DAC I/O 内置PCI板卡或者外置USB板卡(PWM控制和编码器逻辑储存在XILINX芯片中)
尺寸:
450*380*
url: http://www.51lm.cn/p/templates/cn/show.php?cid=766&aid=2287
