|
|||
面向电动自行车的高效的8位微控制器解决方案
型号: PXF0273

面向电动自行车的高效的8位微控制器解决方案
摘要:“尺寸小巧但功能强大”,英飞凌XC864将成为新兴电动自行车市场最流行的微控制器。这款8位微控制器采用TSSOP-20小型封装,并带有适用于三相无刷直流电机应用的CAPCOM电机控制模块。脚踏板运动通过计时器2(Timer2)来测量,以计算协助骑车人顺利骑行所需的助力。此外,它还有过流与过压保护功能。
应用背景
将电机集成于自行车,协助骑车人减少踩脚踏板所费体力,已成为一种不断发展的趋势。本文讨论电动自行车采用电子控制单元(ECU),根据骑车人踩脚踏板所付出的体力来提供相应的电动助力。微控制器相当于ECU的大脑,负责三相无刷直流电机的换相及处理骑行所需电动助力。
三相无刷直流电机以其耐用性、线性控制特性、高效以及优秀的转矩体积比在电动自行车市场备受欢迎。对于无刷直流电机控制而言,确定转子位置和实现复杂控制机制较为棘手和困难。英飞凌针对电机驱动系统提供了多种微控制器——从功能全面的8位和16位微控制器到能控制任何电机驱动系统并集成外设的32位TriCore微控制器。
电动自行车——不断增长的全球市场
行业报告预测未来5年全球电动自行车销量增幅将达到8%至10%。2009年,中国成为全球最大的电动自行车生产国与消费国。许多国家正在推行可以拯救世界的新一代洁净与绿色能源解决方案。电动自行车可为更清洁与更绿色的交通提供完美解决方案。这种趋势有助于推动电动自行车在欧美市场的销售。
英飞凌XC800微控制器系列概述

XC800系列是安全可靠、灵活扩展的智能化8位微控制器,可满足对成本有要求并对性能敏感的工业与多市场应用需求。
英飞凌的高性能8位微控制器XC800系列将双周期8051内核与嵌入式闪存和片上外设融合在一起。XC800的创新改进包括温度范围提升至150ºC、电容触摸控制和内嵌矢量计算机的16位性能等。闪存大小从2KB到64KB不等,并有最高达3KB的RAM,引脚数也从16引脚到64引脚不等,使您能轻松根据自己的用途选出合适的产品。这些高质量微控制器非常适用于5V及3V应用。
工业设备和家用电器的能效问题关乎智能控制与网络连接。利用英飞凌8位微控制器,设计者们可以通过采用磁场定向控制或功率因素校正等高级控制算法和CAN、DALI或IO-链接等通信标准来对优化所设计系统的能效。
高效驱动与自动化
• 工业设备与家用电器的高效驱动
• 泵、压缩机和风扇
• 工业生产或楼宇服务的自动化网络
直观人机界面
• 工业自动化
• 医疗设备
• POS终端
智能照明
• 高亮度LED
• 亮度与颜色控制
• 照明通信网络
智能功率管理
• 高效功率转换
• 电池管理
• 感应烹饪
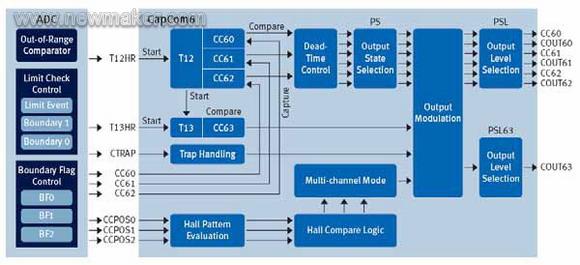
英飞凌CC6单元由1个具有3条捕获/比较通道的计时器模块T12与1个具有1条比较通道的计时器模块T13组成。T12的通道可产生最多6个PWM信号或接受6个捕获触发信号。T12的通道可用于控制最多3个带自动死区生成的半桥。他们可共同产生控制信号模式,驱动交流电机或逆变器。可以很容易地实施正弦或空间矢量调制。特殊操作模式采用霍尔传感器或反电动势检测,支持无刷直流电机控制。不仅如此,它还支持多相电机的阻塞换相和控制机制。ADC与CC6之间的直接硬件连接可实现功能强大的PWM控制。
图注:
ADC:模数转换器
Out-of-Range Comparator:超量程比较器
Limit Check Control:限值校验控制
Limit Event:限值事件
Boundary 1:边界1
Boundary 0:边界0
Boundary Flag Control:边界标志控制
Start :开始
Compare:比较
Trap Handling:自陷处理
Hall Pattern Evaluation:霍尔模式评估
Dead-Time Control:死区控制
Output State Selection:输出状态选择
Multi-channel Mode:多通道模式
Hall Compare Logic:霍尔比较逻辑
Output Modulation:输出调制
Output Level Selection:输出电平选择
CCU6 特性
• 时间测量捕获
• PWM生成比较
• 额外调制突发
• 灵活信号生成单发
• 单极电机多通道
• 无刷直流驱动阻塞换相
• 可编程死区控制
ADC特性
• 10位分辨率、+/- 2LSB
• 转换时间<1.5us
• PWM硬件同步支持无噪声采样
• 自动扫描、注入和比较模式减轻CPU负载
英飞凌电动自行车解决方案
XC864是高性能8位微控制器XC800系列的成员之一。该产品基于兼容行业标准8051处理器的XC800内核。XC864配有功能强大的捕获比较单元(CAPCOM)和10位模数转换器(ADC)。这些功能使得XC864适用于三相无刷直流(BLDC)电机应用,如电动自行车等。
该控制器的主要功能包括三相对称PWM(带自动死区生成)、可与PWM同步触发的快速ADC,硬件故障处理与自动霍尔效应传感器解码及硬件噪声过滤等。XC864采用小型封装(TSSOP-20)。
主要特性
• 27MHz高性能
• 三相对称PWM(带自动死区生成)
• 可与PWM同步触发的快速ADC
• 硬件故障处理
• 自动霍尔效应传感器解码及硬件噪声过滤
图1所示为XC864 8位微处理器框图。

图1:XC864框图
图注:
Program & Data Memory Bus:程序和数据存储总线
8 KB Boot ROM:8KB引导ROM
4/8/16 KB Flash:4/8/16KB闪存
256 Byte RAM+ 64 Byte Monitor RAM:256字节RAM+64字节监控RAM
512 Byte XRAM:512字节XRAM
XC800 Core:XC800内核
Interrupt Controller:中断控制器
System Control Unit:系统控制单元
EVR, POR Brownout:EVR、上电复位/掉电复位
Peripheral Bus:外设总线
Timer 2:计时器2
Watchdog Timer:看门狗计时器
Ports:端口
Debug & JTAG:调试与JTAG
1) 包括1KB监控ROM
2) 包括4kB数据闪存
CAPCOM有一组检测无刷直流电机内嵌霍尔传感器信号的输入引脚(CCPOS0,1,2)。电机转动时,CAPCOM通过传送适当的电机驱动信号,对任何霍尔传感器信号改变做出自主响应。CAPCOM可同步三组高边低边信号,以开关MOSFET为电机转动提供电能。如发生过流,电流感应机制通过连接CTRAP引脚,立即禁用电机。
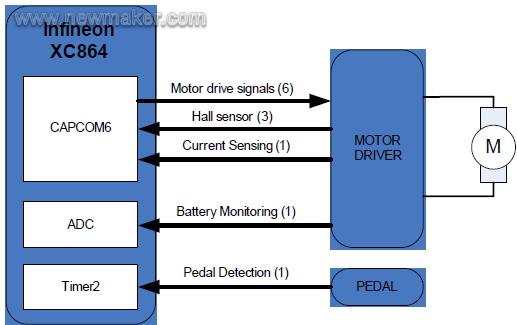
图2:电动自行车框图
图注:
Timer 2:计时器2
Motor drive signals(6):电机驱动信号(6)
Hall sensor(3):霍尔感应器(3)
Current Sensing(1):电流感应(1)
Battery Monitoring(1):电池监控(1)
Pedal Detection(1) :脚踏板检测(1)
MOTOR DRIVER:电机驱动器
PEDAL:脚踏板
对于无刷直流电机,下一多通道状态值取决于霍尔输入模式。霍尔模式(CURH)与调制模式(MCMP)之间是有紧密关联的。因为电机的种类不同,所以驱动电机的调制模式也可以有所不同。因此,界定霍尔模式及其相关调制模式之间关联时保留较大灵活性是有利的。CCU6通过一个寄存器存储实际霍尔模式(CURHS)、下一预期霍尔模式(EXPHS)和它的输出模式(MCMPS)来实现这一功能。在每一个正确的霍尔事件中,新的霍尔模式及其相关输出模式可以通过软件载入(从预定义表中)至MCMOUTS寄存器。这有助于微控制单元为下一即将到来的正确霍尔事件做好准备,从而可以使其即刻做出响应。
图注:
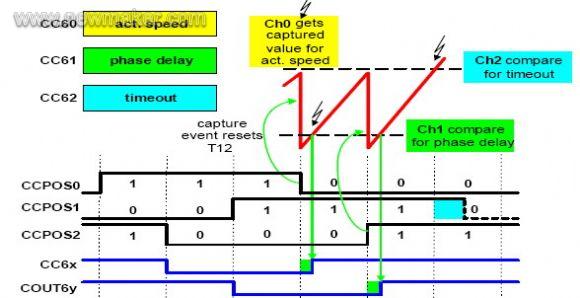
CC60 act. Speed:CC60实际速度
CC61 phase delay:CC61相位延迟
CC62 timeout:CC62超时
Ch0 gets captured value for act. speed:Ch0获取实际速度捕获值
Ch2 compare for timeout:Ch2超时比较
Ch1 compare for phase delay:Ch1相位延迟比较
无刷直流模式下,计时器12的通道0执行捕获功能,通道1与通道2执行比较功能。检测到有效霍尔边缘后,计时器12的计数值将被捕获至通道0(代表实际电机转速),然后计时器12将被重置。当计时器达到通道1中的比较值时,输出将通过触发MCMP位字段的转移来切换。此触发事件可结合实施噪声过滤(正确霍尔事件)的几个必需条件并可将下一多通道状态同步至调制源(避免输出线峰值)。通道1比较功能可用作输入至输出切换的相位延迟,该功能对采用无传感器反电动势技术而非霍尔传感器是必需的。
通道2的比较值可用作指示电机目的速度远小于所需值(可能由异常负载变化而导致)的超时触发(中断)。
大多数情况下,与电源开关行为相关的打开或关闭时间是不对称的。如果打开电源设备所花时间比关闭该电源设备所花时间短,就会产生一个比较普遍的问题。这将导致逆变器桥臂发生短路,从而可能会损坏到整个系统。为了从硬件上解决该问题,CCU6带了一个可编程死区计数器,这将延迟切换信号(主用至被用边缘未被延迟)的备用至主用边缘。
寄存器T12DTC 控制计时器12比较通道的死区生成。每个通道均可通过位 DTEx独立启用/禁用死区生成。这三个通道中的每一个通道均可通其自有触发器及启用信号独立工作。
自陷功能允许脉宽调制输出对输入引脚/CTRAP状态作出反应。该功能可在自陷输入被激活时(例如因过流导致的紧急停止)关闭电源设备。处于自陷状态时,所选择的输出将强制转入备用状态,并将停止任何主用调制。
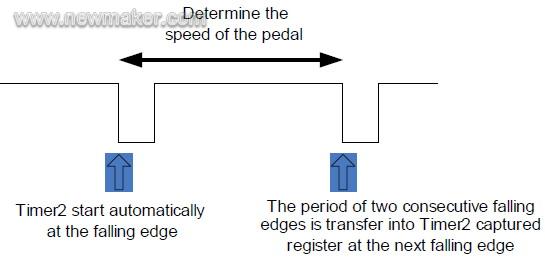
图3:计时器2的脚踏板速度检测功能
图注:
Determine the speed of the pedal:检测脚踏板速度
Timer 2 start automatically at the falling edge:计时器2在下降边缘自动启动
The period of two consecutive falling edges is transfer into Timer 2 captured register at the next falling edge:两次连续下降边缘间隔时间在下一下降边缘被发送至计时器2捕获寄存器
电动自行车的助力取决于脚踏板的速度。如果缓慢骑行,那么所产生的电动助力就小。如果快速骑行,产生的电动助力就会增加。脚踏板速度与MOSFET驱动占空比之间呈正向对应关系。骑车人踩得越快,所需占空比越高,产生的电能越多,自行车行驶得越快。
16位通用计时器(计时器2)可用作计时器与计数器。不仅如此,它还具有自动重载模式与单通道捕获模式。计时器2在脚踏板信号下降边缘自动启动,然后将从自动启动模式切换至捕获模式。在下一下降边缘,计时器2中的检测值(脚踏板信号下降边缘间隔时间)将被发送至捕获寄存器中。根据脚踏板信号下降边缘间隔时间可以计算出驱动MOSFET所需占空比。
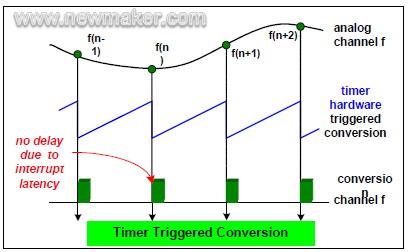
图注:
no delay due to interrupt latency:延迟中断带来的无延迟
analog channel f:模拟通道f
timer hardware triggered conversion:计时器硬件触发转换
conversion channel f:转换通道f
Timer Triggered Conversion:计时器触发转换
传统ADC触发请求是由计时器中断服务例行程序中的软件指令生成的。此传统方法将根据是否有任何更高优先级嵌套中断以在不同时机对ADC进行触发。不过,XC800 ADC的创新设计解决了触发时机不精确的问题。ADC的转换启动可以由硬件直接触发,无需任何CPU干预或软件指令。该功能可实现精确时间等距测量。
XC864包含一个带有4条多路复用模拟输入通道的高性能10位ADC。此ADC采用逐次逼近技术对最多4路不同来源的模拟电压水平进行转换。10位ADC的典型总不可调误差为+/-1 LSB,这将为模拟读数(对于电流测量特别适用)提供高分辨率与精确度。
用于电机控制的同一CAPCOM计时器,可作为ADC的触发器用于电池监控。ADC的限值检测特性允许只在过压或欠压时产生中断。大多数时间,电池在容限范围内运行良好,所以ADC无需中断CPU。只有在过压或欠压条件下,ADC才会对中断CPU。
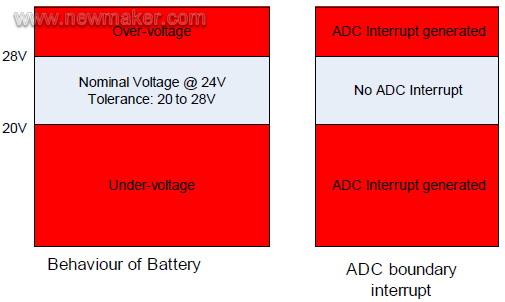
图注:
Over-voltage:过压
Nominal Voltage @ 24V:额定电压为24V
Tolerance: 20 to 28 V:容限范围:20至28V
Under-voltage:欠压
Behaviour of Battery:电池行为
ADC Interrupt generated:生成的ADC中断
No ADC Interrupt:无ADC中断
ADC boundary interrupt:ADC边界中断
电动自行车参考解决方案
英飞凌开发了一组应用套件,展示了采用英飞凌低成本、高价值8位XC866微控制器的电动自行车应用的硬件与固件实施情况。此套件支持霍尔传感器与无传感器这两种三相无刷直流电机。它还支持24V、36V和48V全系列电池并可驱动高达750W的电机。
额定电压 24V至48V
额定功率 高达750W
微控制器 XC866
MOSFET IPP120N06N
IC驱动 6ED003L06-F
该微控制器可通过IC驱动器或分立元件对电机进行驱动。IC驱动器可在早期开发阶段提供保护。最终产品将由于成本因素而采用基于分立元件的设计。用户可使用引导加载选项通过JTAG连接或UART连接下载程序。

与电动自行车应用套件配套的还有电动自行车软件库。可对此软件库的功能进行逐个启用。此软件库占用1713字节代码空间和29字节RAM空间。英飞凌电动自行车硬件板载源代码为电动自行车制造商提供了一个快速开发的环境。
车把控制
• 控制基于车把位置的占空比
电池电压监控
• 如果电池电压低于阈值限值,则减少PWM
过流监控
• 如果电池电流高于阈值限值,则减少PWM
电机控制代码生成——DAvE Drive
DavE Drive是应用代码生成器,适用于利用英飞凌8位与16位微控制器对永磁同步电机与无刷直流电机进行控制。它是一款基于图形用户界面(GUI)的软件工具,可允许应用开发人员以十分高效的方式对用于三相无刷同步电机控制的XC866/XC88x/XC878/XE164软件进行配置。有了DAvE Drive,开发人员只需点击鼠标即可完成对电机选择、电机转速、控制类型和其他各种选项的代码优化。DAvE Drive充分利用英飞凌微控制器的功能,譬如它用矢量计算机生成适用于XC800的优化FOC代码,而这一般是具有电机控制与汇编编程知识的专家才能完成。
DAvE Drive是以应用为中心的DAvE(英飞凌数字应用虚拟工程师)插件。DAvE提供初始化、配置与驱动代码,以减轻初学者和专家的编程负担。该工具生成完整的算法源代码,可用热门编译工具如Keil或Tasking编译器进行编译与调试。
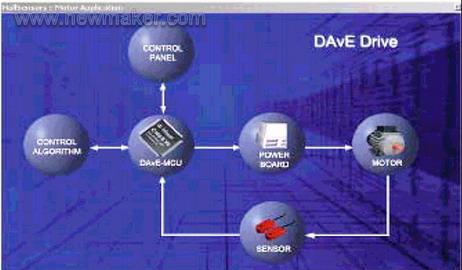
图注:
CONTROL ALGORITHM:控制算法
CONTROL PANEL:控制板
DAvE MCU:DAvE微控制器
POWER:电源
SENSOR:传感器
MOTOR:电机
面向高效驱动与自动化的可扩展电机控制
英飞凌8位微控制器组合可为各种电机控制解决方案提供适当的器件。从无传感器电机的简单阻塞换相到高效磁场定向控制,以及电机电源的功率因素校正。诸如Clarke/Park转换与PI-控制器等FOC算法与复杂数学功能已植入新XC83x器件的ROM代码中。这可以为用户节省出更多的可用闪存空间。
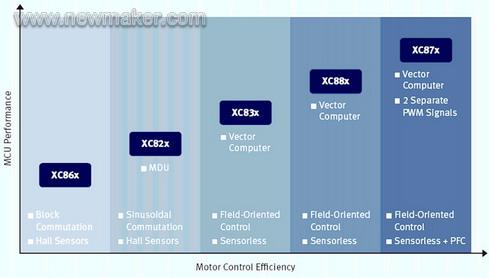
图注:
MCU Performance:微控制器性能
Block Commutation:阻塞换相
Hall Sensors:霍尔传感器
Sinusoidal Commutation:正弦换相
Vector Computer:矢量计算机
Field-Oriented Control:磁场定向控制
Sensorless:无传感器
2 Separate PWM Signals
url:
http://www.51lm.cn/p/templates/cn/show.php?cid=0&aid=273
