|
|||
CANopen从站协议的设计与实现
型号: PXF2974

CANopen从站协议的设计与实现
CANopen作为一种开放性好、标准化、低成本的基于CAN总线的应用层协议,目前已经广泛地应用于工业自动化领域。文章根据CANopen DS301应用层协议规范,在以C8051F500单片机为控制核心的开发平台上建立了 CANopen从节点协议栈总框架,并实现了其中的各种功能模块,整合成完整的协议栈,在搭建的实验平台上进行了协议栈的测试,实验表明:该协议栈功能完整,实时性满足使用要求。
CANopen;C8051F500;从站协议
Design and Implementation of CANopen Slave Protocol
Liu Yi Wang Jiale (School of Information, University of Science and Technology of China,)
Abstract: At present, as an opened, standardized, and low cost application layer protocol of CAN bus, CANopen has been widely used in the field of industrial automation. In this paper, according to DS301 CANopen-Application Layer and Communication Profile, the framework of CANopen slave software based on embedded platform using C8051F500 as the core is designed; and various functional modules are implemented, which are integrated into a complete protocol stack. A test platform is established to test the CANopen slave software we built. The experiment shows the CANopen slave software has
complete functionality and meets the demand of usage. Key words: CANopen; C8051F500; slave software
随着现代工业的发展,控制系统的规模与复杂度成倍增长,数据传输的吞吐量和可靠性要求也随之提升,现场总线技术就是在这种情况下被提出并迅速发展起来的。CAN总线是现场总线国际标准之一,它具有可靠性好、实时性高、抗干扰能力较强等优点,广泛应用于汽车和工业控制领域。但由于其只定义了物理层和数据链路层,并非一个完整的协议,在高级应用中需要应用层的支持,于是CANopen标准应运而生。
CANopen是自动化CAN用户和制造商协会(CiA, CAN-in-Automation)定义的CAN总线应用层协议。它采用面向对象的思想设计,具有很好的模块化特性和很高的适应性。CANopen不仅定义了应用层和通信子协议,还为大多数重要的设备类型定义了大量的规范,不同厂商遵循这些规范开发出的设备之间能够轻易实现互操作。
CANopen作为基于CAN总线的高层协议标
准,在发布后不久就获得了广泛的承认。 尤其是在欧洲,CANopen协议被认为是在基于CAN的工业系统中占据领导地位的标准[1]。
1 CANopen协议总体框架
CANopen协议栈主要包含了两部分,一部分是通信规范,另一部分是设备规范。通信规范(CiA:DS-301)定义了基本的数据通信方式和特性,设备规范(CiA DSP 401DSP4XX)则针对不同的设备类型进行了报文ID的分配和设备特征数据的定义,规范了设备的行为规范。其中通信规范是通用的,本文设计与实现的就是这一部分。
在通信规范中,为了互操作性和兼容性,CANopen设备都必须遵从标准的CANopen设备模型来进行软件设计,如图1所示。
图1 CANopen设备模型 (参见右栏)
CAN通信接口通过操作CAN控制器,在总线上收发各种通信对象,来实现与其他CANopen节点基于协议规范的数据交互;对象字典是CANopen设备的核心,存储
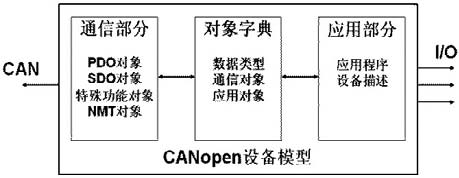
图1 CANopen设备模型节点所有的信息,并向应用程序和通信对象提供访问接口;通信部分通过对对象字典进行操作,与其他节点交换各种通信对象实现CANopen操作;应用程序由用户根据应用要求和设备的具体任务自己实现。
2 CANopen功能模块实现
2.1 CAN驱动程序实现
针对C8051F500单片机,实现了CAN驱动程序。 CAN驱动程序负责完成CAN控制器的操作、报文收发、 CAN错误处理等任务,由以下部分组成:1)CAN控制器的初始化,主要对CAN控制器的相关寄存器进行配置,包括波特率的设置,消息对象的配置,接收、发送屏蔽寄存器的设置;2)CAN发送程序,任务是将打包好的数据根据帧标识符,通过接口寄存器分发到相应的邮箱里,然后启动发送;3)CAN接收程序,由CAN中断处理程序来完成,负责将报文分配给各个通信模块处理。
2.2 对象字典实现
对象字典OD(Object Dictionary)是一个有序的对象组:每个对象采用一个16位的索引值来寻址,同时定义了一个8位的子索引用于访问数据结构中的单个元素。每个 CANopen设备中都必须包含一个对象字典。对象字典分为了两部分,通用的通信子协议区域和特定的设备子协议区域,前者包含了描述这个设备通信行为的所有参数,后者包含了设备任务相关的所有数据。
本文设计的对象字典结构如图2所示。图2 对象字典模块 (参见下页)针对单片机计算资源紧缺的特点,对象字典实体采用
38
电子技术设计与应用 Electronics Design & Application
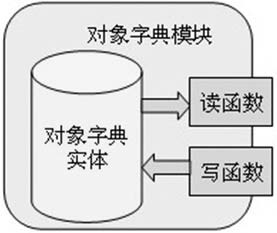
图2 对象字典模块二维静态结构体来实现,它具有结构简单、访问效率高等优点。读写函数与对象字典实体配套使用,目的是将对象字典封闭起来,有效地杜绝非法访问的情况,保障对象字典的数据安全。
2.3 通信对象的实现
2.3.1 PDO模块
PDO服务主要用来实现实时数据的传输,基于生产者和消费者模式,它的通信行为由通信参数决定,传送的数据由映射参数来决定。本文实现的PDO模块包含了三个子模块,如图3所示。
CANopen协议规定了4 类通讯对象:SDO(Service Data Object,服务数据对象)、过程数据对象)、NMT(NetworkManagement,网络管对象)以及特殊功能对象[2]。
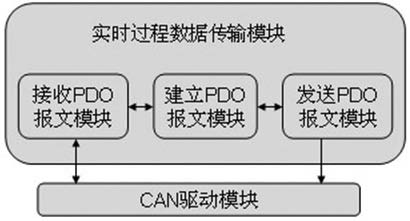
图3 PDO模块组成
建立PDO报文模块被其他两个模块调用,他的任务是根据映射参数表把对象字典中对象的数据复制进PDO报文中,交由其他模块处理,建立过程中需注意PDO报文的剩余容量。接收PDO模块的任务是完成PDO数据的解析,将数据放入指定对象中;发送模块负责根据 CANopen协议规范,依据PDO通信参数,实现各种PDO传输方式,包括同步周期、同步事件预触发、异步事件触发等方式。
2.3.2 SDO模块
SDO模块是对象字典的远程访问接口,一般被用来进行节点参数配置和获取。它基于客户端服务器模式,每个访问请求都必须应答,实现了可靠的点对点数据传输。CANopen为SDO服务设计了5个请求/应答子协议,分别是:启动域下载/上传、域分段下载\上传、中止域传送。
本文设计的SDO模块包含了访问发起模块和应答模块。访问发起模块的任务是根据上层的调用发起SDO通信,实现了5个访问子协议中的请求部分;应答模块则解析收到的SDO报文中携带的命令字,实现了5个访问子协议中的应答部分。
2.3.3 NMT模块
每个CANopen节点内都运行着一个状态机,状态转换由主节点控制,不同的状态对应不同的节点任务,也对应了不同的模块可用性。状态转换如图4所示。
图4 节点状态转换图(参见右栏)本文实现的从节点NMT模块的任务是响应主站的 NMT控制命令,并反馈自身状态,汇报错误信息。状态转换模块的流程:接收到NMT命令后,首先解析NMT命令字,检查状态转换合法性,然后设置节点状态,启停
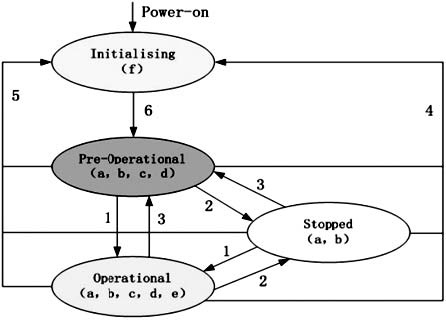
图4 节点状态转换图各功能模块;状态反馈模块采用了CiA组织推荐使用的心跳模式,即从节点周期性地向网络上发送包含自身状态信息的心跳报文,供主站和其他节点监视。
2.3.4 总体流程
借助于状态机,设计了如图5的程序运行总体流程。
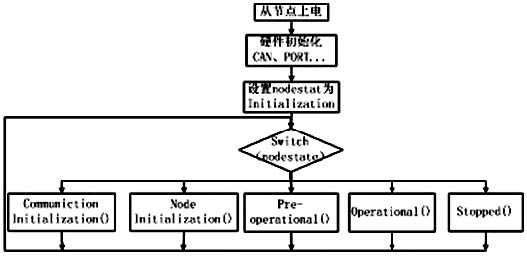
图5 从节点软件总流程
从节点上电启动后,先进行必要的硬件初始化,如系统时钟、port、CAN接口、定时器、AD等,完成后设置节点状态为initialization,进入状态机,软件在状态机内循环运行。通信初始化函数主要负责初始化从节点的对象字典,节点初始化函数则负责将节点的输出置为上电值,设置完成后设置节点状态为pre-operational,软件运行至preoperational函数,这个函数的功能是协助主站完成对从节点的通信配置。当从节点收到start_remote_node命令后,进入operational状态,此状态包含了从节点的控制程序,即从节点开始正常运行,执行指定的底层任务,如数据采集、控制输出等。若节点接收到主站的stop_remote_node命令,则进入stopped函数,在此状态下从节点停止执行底层任务,等待主节点的启动命令。
3 实验
3.1 测试实验平台的搭建
为了测试本文的CANopen从节点协议,搭建了基于 USB-CAN模块的测试平台,结构如图6所示。主站是装有ZLGCANTest的计算机,以USB-CAN通信模块作为 CAN网络接口,实现与从站的连接。示波器监视总线波形,通信波特率设置为500kb/s。
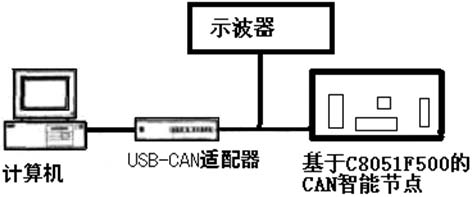
图6 测试实验平台结构
3.2 实时性测试
首先进行了协议栈的实时性测试,测试分为两步,第一步是测试PDO通信的昀小周期,设置PDO为同步周期发送模式,即收到一个同步报文后返回一个数据包,测试结果如图7所示。
39
电子技术设计与应用 Electronics Design & Application
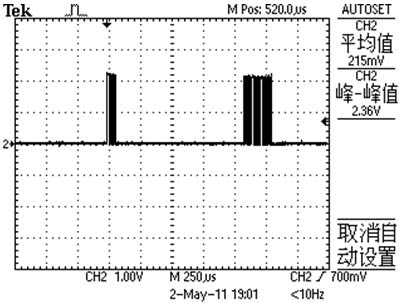
图7 PDO昀小通信周期
可见同步帧与数据包的间隔时间约为1ms,整个总线占用时间约为1.3ms。
第二步进行了SDO模块的昀小响应时间测试,测试结果如图8所示。
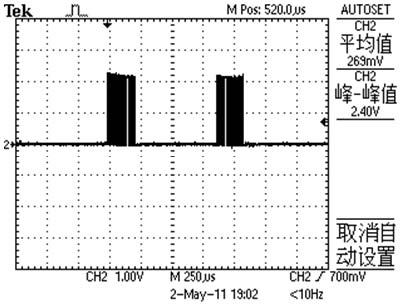
图8 SDO模块昀小响应时间
3.3 功能性测试
我们对实现的协议栈进行了CANopen协议功能和兼容性的测试,测试结果如 表1所示。
可见SDO请求报文和响应报文间隔时间约为0.7ms,总线占用时间约为1.1ms。协议栈的实时性基本满足我们的使用要求。
表1 功能测试情况

目前,我们已经将该协议栈应用于实验室建立的低温等离子体测控设备系统中,经过一段时间的使用,此协议栈满足我们的使用要求。
本文依据CiA DS301规范,设计了CANopen协议总体框架和软件功能模块,并将其应用于基于C8051F500单片机的嵌入式CAN智能节点上,实现了CANopen从站软件。协议栈采用 C语言编写,可移植性较好。经测试表明:协议栈实时性满足使用要求,功能完整性较好。
url: http://www.51lm.cn/p/templates/cn/show.php?cid=0&aid=2974
