|
|||
基于-CANopen列车通信网络
型号: PXF2985

![]()
基于 CANopen列车通信网络的地铁门控
摘要:本文结合地铁门控系统的应用实例,分析了采用 PLC作为门控制器实现对地铁门控制的逻辑原理,并对基于 CAN的高层协议 CANopen和采用CANopen的列车通信网络进行了简单介绍,设计了 PLC门控器作为 CANopen列车通信网络从节点的方案,实现了通过网络对地铁门进行操作控制和状态监控、故障诊断等功能。关键词: CANopen协议;列车通信网络; PLC;地铁门控系统中图分类号: TP273文献标识码:A文章编号: 1009-9492(2008)08-0025-05
地铁门一般分为内藏门、外挂门和塞拉门等。早期的地铁,如北京一、二号线,上海一、二号线及广州一号线等均采用内藏门。而外挂门在国内未广泛采用,仅广州地铁二号线采用了外挂门 [1]。随着技术手段的不断进步,塞拉门结构复杂、故障率高的缺点逐渐被克服,同时因为采用塞拉门的车体具有美观、密闭性好等优点,不断被更多的厂商所接受 ,如深圳地铁一期 [1]和正在建设中的南京地铁二号线、北京机场专线轻轨等均采用塞拉门结构。
随着列车通信网络技术的迅速发展 ,现场总线技术被广泛地应用以满足列车对车载通信网络的要求,目前在列车通信网络中应用比较广泛的现场总线主要有 TCN标准的绞式列车总线 WTB、多功能车辆总线 MVB、LonWorks总线和 CAN总线。其中 CAN是一种有效支持分布式控制和实时控制的串行通信网络 ,它有着很高的实时性、可靠性、抗干扰能力和检错能力,并且具有比其它现场总线低的开发费用 [2]。但它只对网络的物理层和数据链路层进行了规范,没有对应用层做相应的说明。CANopen作为基于 CAN的完全开放的高层协议 ,对 CAN的应用层做了具体规定,实现了不同厂商设备的互用。在欧洲,它被认为是在基于 CAN的工业系统中占领导地位的标准 [ 3]。 CANopen作为列车通信网络,在欧洲已经得到较为广泛的应用。在国内,长春轻轨二期和正在建设中的北京机场专线轻轨以及南京地铁二号线部分车辆都采用了 CANopen作为列车通信网络。
为了对地铁门进行控制 ,一般采用分布式的门控制器门控系统,即每个门有独立的控制器,且随着列车通信网络技术的迅速发展 ,门控制器需要与列车主控单元通信 ,接收网络上从主控单元传来的控制信息 ,同时将门的状态和诊断信息反馈给主控单元。
目前的地铁门控制系统一般由门供应商集成 ,虽然节省了成本,但由于供应商技术水平高低不一,常出现门与整车通信网络之间的通信兼容问题。本文分析和设计了基于 CANopen网络的地铁门控系统 ,采用施耐德集团旗下 Selectron公司针对列车控制生产的专有 PLC设备实现了对地铁门的集中控制和门控器与主控单元之间的网络通信 ,取得了较为理想的应用效果。
2门控制系统硬件及原理
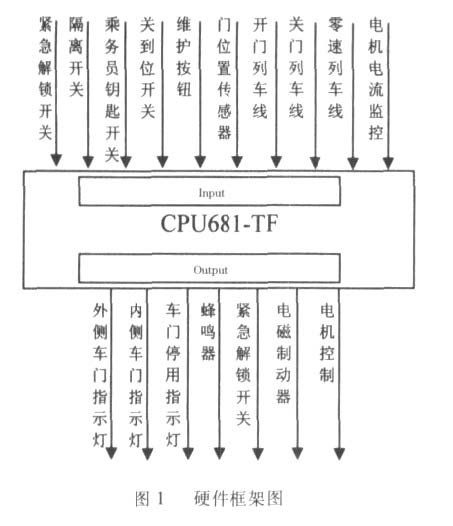
由于塞拉门的应用日趋广泛 ,本文的控制系统主要适用于塞拉门的控制,对内藏门和外挂门也具有一定普遍适用性。硬件框架图如图 1所示。
Selectron MAS 681-TF可编程逻辑控制器 ( Programmable Logic Controller)是 Selectron公司专为列车门控制系统设计的。考虑到 CPU681-TF运算速度快 ,拥有足够的 I/O便于后期扩展以及具有针对列车运行环境优化的硬件性能等因素 (符合 EN50155标准 ),故选择它作为本系统的门控制器,其参数如下。
CPU681-TF: 24VDC电源供应 (可在 16.8-30VDC的电压范围下正常工作), 24点数字输入 (24VDC)和 24点数字输出 (继电器型 )以及 2点模拟输入和 2点模拟输出。
该模块集成了 CAN ( CANopen)、 RS485、 RS232、 RS422等接口,可以根据实际情况与车辆总线连接实现通信 ,并能够作为维护接口对程序进行更新、修改等操作。
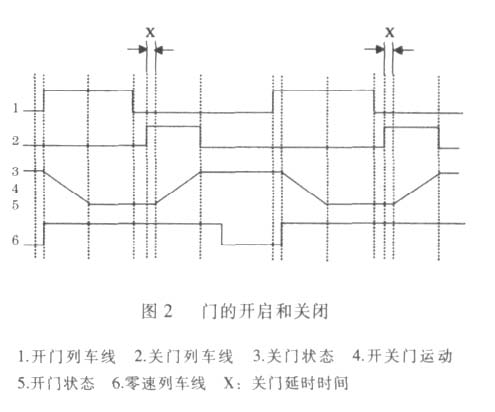
2.1开门、关门、零速列车线
在过去的应用中,开门列车线、关门列车线和零速列车线是通过硬线连接直接传输到门控制器的,如正在建设中的南京地铁二号线就采用 110VDC开关量传输开、关门和零速列车线信号。如图 2所示,当零速列车线有效 (车速≤1km/h)、关门列车线无效且开门列车线有效时,门控制器执行开门操作。当零速列车线有效、关门列车线有效时,门控制器执行关门操作。若门在开状态时零速列车线失效 (车速≥1km/h),门控制器将强制执行关门操作 (无关门延时和障碍检测)。
列车通信网络技术的发展和可靠性的提高,促进了通过总线传输开门、关门信号技术的应用。例如北京机场专线轻轨列车的门控制器就是从列车的CANopen网络上获得信号 ,从而控制门动作 ,但零速信号仍然从列车线获得 ,其整体的逻辑和实现效果与硬线连接方式相同。
本文中,开、关门命令信号都由网络进行传输。
2.2紧急解锁装置
紧急解锁装置使门可以在紧急情况下从内部打开,该信号由 24VDC数字量接入 ,门控制器收到信号后根据实际情况 (零速列车线)判断是否同意紧急开关动作,其操作由 24VDC的数字输出量完成。
2.3门隔离
对门进行隔离操作将触动隔离开关并将门机械锁紧 ,同时向门控制器输入一个 24VDC数字量信号 ,门控制器将关闭门所有功能并使门切除指示灯持续明亮。此时门已经被机械锁住,紧急解锁装置无效。
2.4乘务员钥匙开关和维护按钮乘务员钥匙开关信号和维护按钮信号都由 24VDC数字量接入门控制器,只有对门进行有效操作时门控器才接收到相应信号。
2.5关到位开关和门位置传感器
门关到位开关信号由 24VDC数字量接入门控制器 ,门控制器根据该信号判断门是否正常关闭 ,同时对门的关闭锁紧状态进行监控。
门位置传感器集成在门电机上 ,通过电机转子转动输出的编码脉冲计算门的行程 ,并将其传入门控制器进行各种运算和判断。门执行开操作时门控制器就是通过门位置传感器的输入判断门的最大行程。
2.6驱动电机和电磁制动器
门驱动电机有专门的驱动电路和控制电路。门控制器输出 24VDC数字量信号控制电机的正转和反转 ,从而控制门的开和关。门在执行开或关操作时 ,电磁制动器始终断电。电机的 PWM调速和闭环控制不在本文讨论范围之内。
2.7指示灯和蜂鸣器
门状态指示灯和蜂鸣器均由门控制器根据运行需要输出 24VDC数字量信号控制。门控制器交替输出 “1”和 “0” (方波信号 ),通过控制两者间的输出时间比来控制指示灯闪烁和蜂鸣器蜂鸣。
2.8门的障碍检测门电机运转电流将通过模拟量信号输入到门控制器并进行记录和比较,作为激活障碍检测系统的标准之一。
同时,门的位置传感器能将门的行程分解成距离段输入门控制器,如果不是在给定时间内发生某一位移,障碍检测系统亦将被激活。
3 CANopen协议介绍
虽然 CAN具有众多的优点 ,但 CAN本身并非一个完整的协议。 CAN的标准协议 CAN2.0A/B和国际标准 ISO11898的定义中,只包括 OSI七层参考模型中的物理层和数据链路层两个底层协议,没有对应用层进一步规范 ,本身并不完善。在此背景下 ,由 CiA (CAN in Automation)组织监督开发了 CANopen高层协议 ,对 CANopen应用层进行了规范 ,同时由于其完全开放和实现简单的优点,更有利于实现不同厂商设备之间的互用。
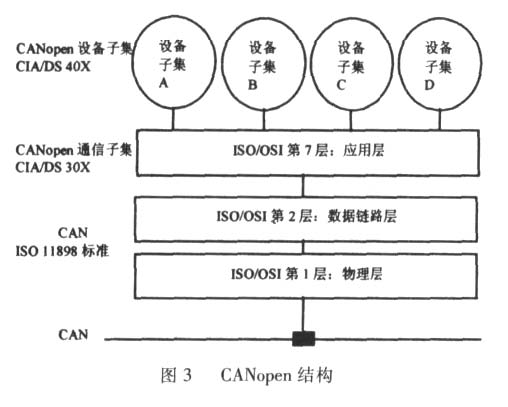
CANopen协议集的主要部分包括通信子集和设备子集 ,通信子集规定了基本的通信机制及特性 ,设备子集定义了不同类型的标准设备 (如数字和模拟的输入输出模块、驱动设备、操作设备、控制器、可编程控制器或编码器等 )及其相应的功能 [4]。 CANopen的结构如图 3所示。
应用程序包括功能部分和通信部分 ,功能部分实现对设备内部的控制、I/O访问、逻辑运算等操作 ;通信部分通过对对象字典提供的接口进行操作来实现CANopen通信。
CANopen协议对总线上传输的数据进行分类,即每一个传输数据都是某一特定类的通信对象 ,从而实现面向对象的程序设计。每一类传输对象都有其规范化的格式,从而实现应用层结构上的统一。在 CANopen的通信协议中共定义了 4类通信对象 ,分别是 :网络管理对象 (NMT: Network Management)、服务数据对象 (SDO: Service Data Object)、过程数据对象 (PDO: Process Data Object)和特殊功能对象 (包括同步对象 SYNC、紧急对象 Emergency、
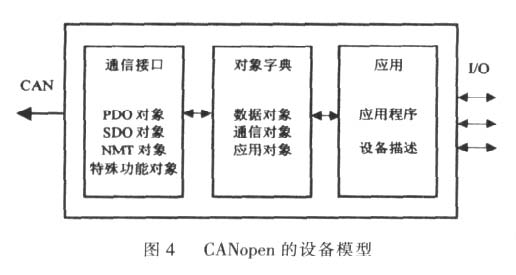
一个 CANopen的设备模型可以被分为三个部分,如图 4所示。其中通信接口和协议软件结合 ,提供了在总线上收发通信对象的服务, CANopen设备间的通信是通过交换通信对象完成的。对象字典是 CANopen协议的核心内容 ,它通过 16位的主索引和 8位的子索引提供了对所有重要数据、参数、设备的功能进行访问的能力。CAN总线上所有设备都具有数据结构相同的对象字典 ,但其中内容不同。对象字典是 CANopen一系列子协议 (通信协议和设备协议)具体的实现形式,另外还包括数据类型的定义和制造商自定子协议。
时间基准 Time-Stamp和心跳报文 HeartBeat等)[5]。
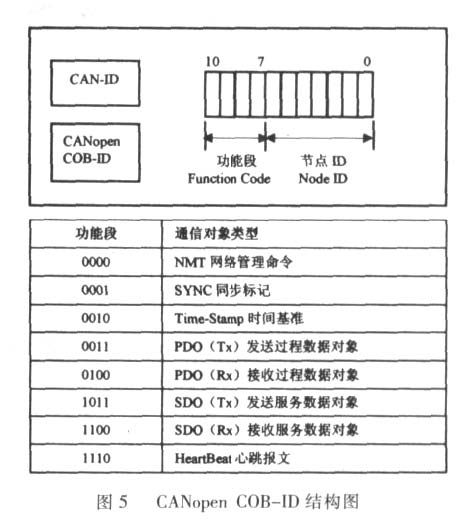
CANopen协议利用 CAN通讯报文的标识符段,定义出 CANopen的通信对象标识 COB-ID,每个通信对象都有其唯一的 COB-ID。COB-ID由 11位的二进制数构成,其中 0到 6位表示发送该通信对象的设备节点地址 ,7到 10位是功能码,表示该通信对象的类型。其结构如图 5所示。
4门控制器与 CANopen网络通信的实现
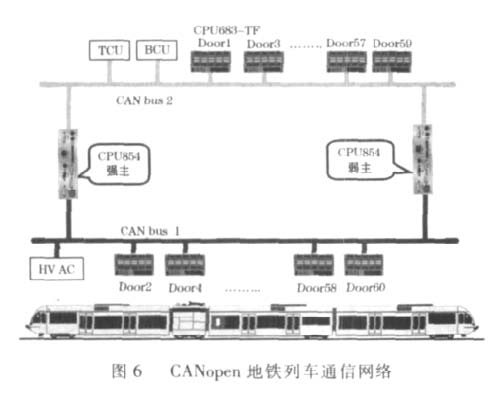
本文根据 CANopen网络在国内外列车上应用的方案实例,设计了一个带冗余的主从通信方式列车通信网络。由 Selectron公司专为铁路应用设计的 PLC控制器 CPU854-T作为网络主节点,本文选用的 CPU681-TF门控制器作为网络从节点。牵引单元 (TCU)、制动单元 (BCU)、空调控制单元 (HVAC)等,由于不在本文讨论范围内,故不进行详细描述。 CANopen地铁列车通信网络设计如图 6所示。
CPU854-T具有两路独立的 CAN接口,因此把地铁门的控制器分别接在两路 CAN总线上,即使一条总线故障, 另一条总线仍然工作,保证了至少一半的门正常运行。作为强主的 CPU854-T拥有对整个网络节点的管理权,而弱主则对整个网络中的 CAN报文进行监听,其本身不向网络中发出任何数据。当弱主在规定时间内检测不到强主的心跳报文时 ,认为强主已经掉线,将自动成为新的强主 ,行使对整个网络的管理权。这样的冗余设置进一步保证了网络的可靠性。
本文的列车通信网络是以 6节车地铁编组,每节车两侧各 5扇门为例设计。由于 60个门控制器节点在网络通信和控制上有着共同性,本文主要以单个门控制器节点为例,讨论并实现了其在 CANopen网络中与主节点的通信。
4.1网络通信的节点启动过程
网络的启动过程是一个节点设备对自身进行配置 ,并通过主节点设备对从节点设备进行操作的一个过程,网络启动成功后,各节点会按照在启动过程中的参数配置进行数据通信。主节点行使对整个网络的管理权。
节点总共有四种运行状态 ,分别是初始化、预运行、运行和停止状态。节点在上电初始化后 ,将自动进入预运行状态,然后根据主节点发送的网络管理命令 (NMT),可以在预运行、运行和停止状态间切换。主节点发送的网络管理命令结构如表 1所示。
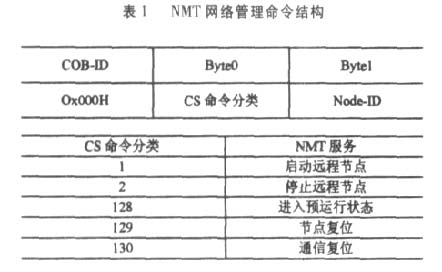
Byte 0位的 CS命令定义功能如表 1所示 ,Byte 1位为被操作的节点地址,若为 0时,代表对网络中所有节点进行操作。
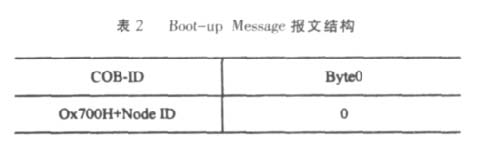
当从节点初始化完成进入预运行状态后,将向主节点发送初始化成功报文 (Boot-up Message),其结构如表 2所示。
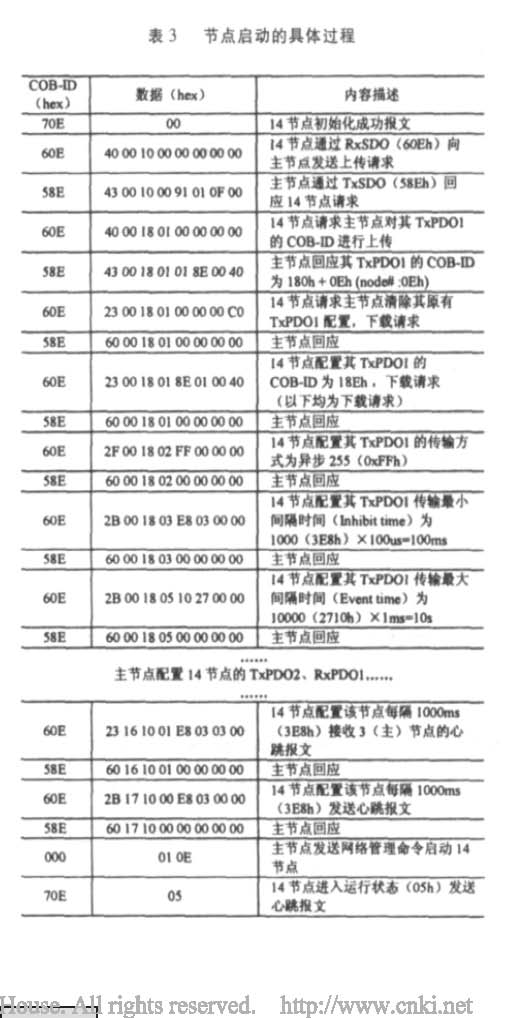
主节点收到从节点初始化成功报文后,通过 SDO对从节点进行通信参数配置,配置完成后,主节点发送网络管理命令 NMT要求启动从节点,从节点进入正常运行状态,可以通过 PDO进行正常通信,每个 PDO中可以传送 8个 Byte的数据内容。表 3是一个节点地址为 3的主节点,对节点地址 14的从节点进行启动的具体过程。
4.2门节点通信的数据内容和 PDO安排
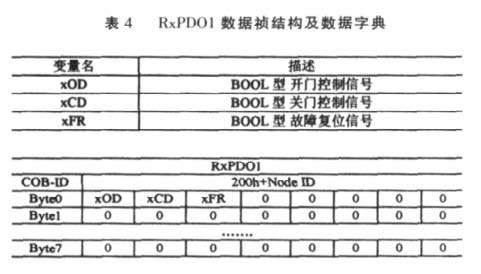
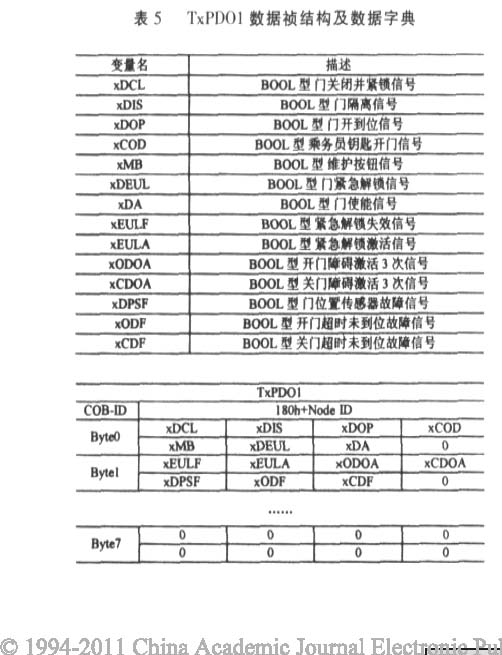
在本文的实验中,门控制器节点需要通过一个 RxPDO从网络上接收主控制器发出的控制信号,一个 TxPDO向主控制器发送门状态信号、故障诊断信号等。TxPDO和 RxPDO如前文 3.1所述,由主控制器节点在门节点的启动过程中进行配置 ,其中 TxPDO1的 COB-ID为 180h+门控器 Node ID, RxPDO1的 COB-ID为 200h+门控器 Node ID。
RxPDO1中传送的信号包括开门、关门和故障复位信号,数据字典和 RxPDO1数据祯结构如表 4所示。
如上所述 ,门节点在网络中被主控制器节点启动后 ,通过 TxPDO和 RxPDO进行实时的数据收发 ,就成功实现了门操作的网络控制和状态检测、故障诊断等功能。
5门控制系统软件原理
本文采用 Selectron开发的符合 IEC61131标准的 CAP1131软件对 CPU854-T和 CPU683-TF进行编程 ,完成网络配置,实现通信以及门控制等功能。该软件界面如图 7所示。
TxPDO1中传送的信号包括门状态信号 ,如门关闭并锁紧信号、门隔离信号、门开到位信号、乘务员钥匙开门信号、维护按钮信号、门紧急解锁信号、门使能信号 (零速列车线有效)等;还包括门故障诊断信号 ,如紧急解锁失效信号、紧急解锁激活信号、开门障碍激活 3次信号、关门障碍激活 3次信号、门位置传感器故障信号、开门超时未到位故障信号、关门超时未到位故障信号等。数据字典和 TxPDO1数据祯结构如下表 5所示。

对 PLC的编程根据实现的功能可以分为通信部分和控制部分。
5.1通信部分
通信部分软件对作为主节点的 CPU854-T和作为从节点的门控制器 CPU683-TF进行配置 ,通过收发 PDO进行数据传输,实现网络通信。
5.2控制部分控制部分软件流程如图 8所示。在 PLC门控制器上电时 ,若门未在关闭并锁紧的位
置,将运行初始化程序一次,该程序将关闭门直到关闭并锁紧位置,之后该门进入正常工作状态。在此初始化过程中,障碍检测系统将正常工作。
开门、关门信号由主控制器通过网络传输到门控器上 ,在开门过程中若障碍检测未被激活 ,则 PLC门控制器根据门位置传感器发送的门最大行程位置来判断开门结束。若超过正常开门时间未到最大行程位 ,则判断为
理可知,欲保持 d与 z1的线性关系。就要求被测物体在每一位置 z1时,被测点 P都能很好地成像到 Pf,这需要 L1是复杂的光学系统或非球面透镜 ,则相应的传感器的结构尺寸和成本都要增加。鉴于非球面透镜难以加工,物镜 L1可采用球面透镜。为了仍能实现较高的线性关系 ,会聚透镜 L2和 CCD像面就不一定要分别位于物镜 L1和会聚透镜 L2的焦平面上了。
在实际应用中,由于缝隙 S具有一定的宽度,为减小 CCD上的光斑尺寸、提高测量精度,可在每个缝隙 S后面增加一焦距为 f2的会聚透镜 L2,若被测点的法线与透镜光轴成一定角度,则会因 CCD上的信号变弱而形成盲区。为避免这种情况,可采用沿光轴方向成均匀分布的三个缝隙和三个 CCD检测元件 ,采用这种方式可保证至少有一个 CCD元件在起作用 ,从而提高了测量的准确性和可靠性。同时由于激光的高度连续性,可使 CCD元件达到高度灵敏性,满足其作为汽车测距传感器的要求。
5结束语
在激光测距技术的支持下 ,这种防追尾碰撞系统可基本实现对前车实时速度的监控 ,极大程度地避免汽车追尾事故的发生。而且在防止正面碰撞、绕过障碍物、防止汽车撞人,等方面也有很好的效果。
作者简介:韩天龙 ,男 , 1978年生 ,河北张家口人 ,大学本科 ,助教。研究领域:汽车电子控制技术。
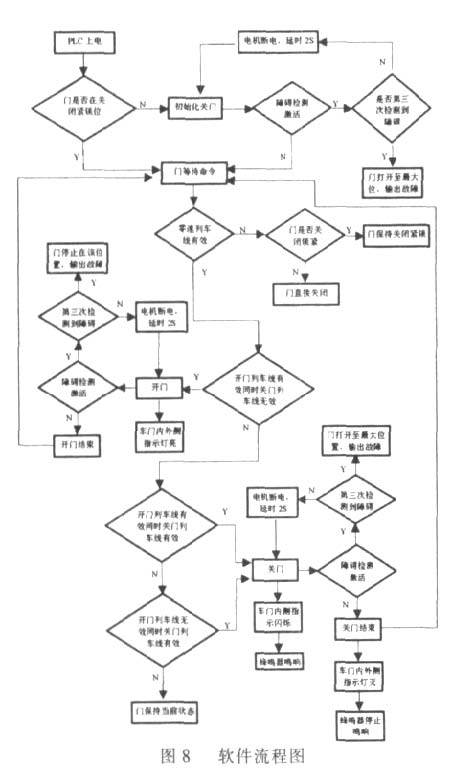
开门故障。在关门过程中若障碍检测未被激活 ,则 PLC门控制器根据门关到位限位开关发送的信号判断关门结束 ,若超过门正常关闭时间未收到信号 ,则判断为关门故障。
开、关门故障信号和开、关门激活障碍检测超过三次时发送的故障信号都将通过网络传输到司控室的主控制器并显示在屏上,由司机作出重新发送关门信号或开门信号等处理。
08-0 -13 Strategy of Battery Management System
8 Based on Instantaneous Equilibrium for Hybrid Electric Vehicle PEI Feng , 1 ZHAO Ke-gang2 (1.Automotive Engineering institute, Guangzhou Automotive Group Co., Ltd, Guangzhou 510640, China; 2.School Automotive Engineering, South China UniversityofTechnology,Guangzhou510640,China) Abstract: Theindispensableofbatterymanagementsystem and its elementary structure are mentioned at first. Thena kind of battery management system is detailed, including softwareandhardwarewhich the HCS12 series singlechip of Motorola Company and battery monitor chip DS2438 forms the system s core. The control strategy of the system based on fuzzy logic controller is detailed, the application effect is analyzed, and its convenience and effectiveness forinstantaneousequilibriumarealsoproven. Key words: electric vehicle; battery; instantaneous equilibrium;controlstrategy
08-0 -1 8 The Design of High-speed Motor Speed
8 Detecting System Based on LabVIEW
LI Xue-cong, LI Xu-ran, XIE Yang-yang, WANPin (Faculty of Automation, Guangdong University of Technology, Guangzhou 510090, China)
Abstract: In many motor controlling and related industrial process, there needsa speed detecting system which has greater range of speeds with high resolution, fast and accurate response. This paper introduces the method of designing and structurea LabVIEW-based high-speed motor speed detecting system, including external signal introduction, data acquisition, internal procedures diagram and human-machine interface. Besides, the paper alsobringsforward the approach of continuous high-speed data acquisition and its analysis, inventory method as well, which is based on LabVIEW. Meanwhile, the article also gives a brief introduction of the concept of virtual machines and the programming environment of LabVIEW. Key words: high-speed motor; speed detecting; virtual instrument
08-0-The of Intelligent Vibration
8 21 Design Examination System Basing on Bluetooth Technology
HUA Xue-hui , LIU Nan-ping , CHEN Da-li (1.Guangdong Songshan Polytechnic College ,Shaoguan 512126, China; 2.Tianjin Normal University, Tianjin300387,China )
Abstract: This paper designed the intelligent vibration examination system based on the Bluetooth technology. The system usedtheSCMof12bitA/Dtransformationas thecontrol core, the BlueCore2-external of CSR Corporation as the Bluetooth module and the USB interface to communicate with computer. Thus the high accuracy data acquisition transition platformwascomposedbydatastorage. Key words: Bluetooth; oscillation measure; BlueCore2-external; CygnalF010; PDIUSBD12
08-0
8 23 Air-conditioning Control System Design of the Clean Operating Room
YU Bin-gao, LUO Geng-he (Xi an Aerotechnical College, Xi an 710077,China)
Abstract: To realize the air-conditioning control of the clean operating room, the controlling requests of the clean operating room air-conditioning are analyzed in this paper. According the air dispose system, the control system, which is consisted with ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() are designed. The air-conditioning control strategy is built to realize the requests of the clean operatingroom. Key words:programmable logic controller; clean operating room; air-conditioning control system; stableairvolumesystem
are designed. The air-conditioning control strategy is built to realize the requests of the clean operatingroom. Key words:programmable logic controller; clean operating room; air-conditioning control system; stableairvolumesystem
08-0-8 25 Design of Metro Door Control System Based on CANopen Train Communication Network
SONG Jia-jing, LIU Zhi-gang (School of Electrical Engineering, SouthwestJiaotong University, Chengdu 610031,China)
Abstract: With application example of metro door control system, the logical principle of using PLC to be door controller for implementing metro door control is analyzed in this paper.A compendiary introduction of high-level protocol based on CAN and traincommunication network which used CANopenprotocol isgiven. Project of using PLC door controllertobeaslavenode in CANopen train communication network is designed for implementing door status monitoring, fault diagnosis and the control of metro door are realized via Network. Key words: CANopen protocol; train communication network; PLCdevice; metro door; control system.
08-0 -30 Embedded Design of the Remote Control
8 of the Laser Marker by Using μC/OS-Ⅱ
ZHOU Min, YANG Yong-qiang, LI Yang, LIANG Kun
(Mechanical Engineering College, South China University of Technology, Guangzhou510640,China)
Abstract: The remote control of the laser marker isa typical product adopted embedded system and human -machine interface In . order to operate the laser marker conveniently and the cost of PC controla graphical interface has
, eloped inte embedded operate system μC OS
h/ Ⅱ by using ARM processor . The hardware and software design of the remote control is completed in the design,
C GUI is successful transplanted to the target system and the μ/ programmingofGUItaskiscompleted. Key words: laser marker; remote control; embedded system ;
C GUI μ/
08-0 -34 Positioning Accuracy Measurement and Its
8 Error Compensation of XK712B Milling Machine
ZHAO Yong-hao (Guangdong Machinery Research Institute, Guangzhou510635, China)
Abstract: This paper introduces how to use the laser interferometer system in positioning accuracy measurement of the XK712B CNC milling machine with Siemens 802C control system, and presents pitch compensation method to increase the machine toolprecision. Key words : 802C; laser interferometer; XK712B CNC milling machine; pitch compensation
08-0 -37 8 Improving on Machine Tool Centralized Lubrication System Control
RAO Huan-rong (Meizhou Gear Factory,Meizhou 514016,China) Abstract: This paper introducesfourusualkindsofmachinetool centralized lubrication system control mode, which have the function of interval time and lubrication time control, and then point out their shortcomings, finally presentsa design of new electricity circuit controlled withthecount-downtimer. Key words: machine centralized lubrication electricity system; shortcoming; count-downtimer;improve
url: http://www.51lm.cn/p/templates/cn/show.php?cid=0&aid=2985
