|
|||
五自由度伺服直角坐标机器人
型号: PXF3075
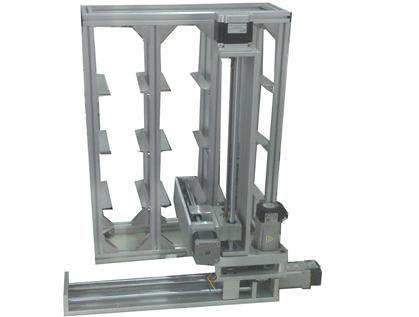
五自由度伺服直角坐标机器人系统
|
|
强 制 |
|
Ø 本说明书是以机器人的机构内容为中心的技术资料。为确保本机器人系统的正常应用和妥善保养及检修,本说明书中包含安全注意事项、使用注意事项、详细的规格说明、保养及检修的项目等内容。请务必在认真阅读并充分理解和掌握的基础上使用产品,并严格按照其上所要求的事项做,以确保正确的使用。 Ø 另外,有关安全的详细内容见“安全注意事项”。 |
|
|
|
注 意 |
|
Ø 说明书中的图解,有的为了说明细节,是已经取下了盖子或者安全罩后进行绘制的。但是在运转此类部件时,务必按规定将盖子或安全罩还原安装好后,再按照说明书要求运转。 Ø 说明书中的图片及照片,为具有代表性的事例,可能与所购买产品不同。 Ø 由于破损、丢失等原因需订购说明书时,请与本公司销售部门联系,按封面的标题型号订购。 Ø 客户擅自进行产品改造,不在本公司保修范围之内,此种情况本公司概不负责。 |
|
安全注意事项
使用(安装、运转、保修、检修等)前,请务必熟读并掌握本说明书和其他的机器人附属资料,在熟知全部机器知识、安全事项及注意事项后再开始使用。
本说明书中,将安全注意事项分为“危险”、“注意”、“强制”、“禁止”四种等级,并配以不同的符号以引起使用者的注意。
|
|
危险 |
误操作时有危险,可能发生死亡或重伤事故。 |
|
|
注意 |
误操作时有危险,可能发生中等程度伤害或轻伤事故。 |
|
|
强制 |
使用者所必须遵守的事项。 |
|
|
禁止 |
禁止的事项。 |
注:任何的操作失误都会因为情况的差异而产生不同的严重后果。所以,任何的注意事项都应该给予足够的重视,并严格遵守。
|
|
危 险 |
|
Ø 紧急状况下,若不能及时制动机器人,可能引发人身伤害或者设备的意外损坏。 Ø 当发生意外事件,并按下了急停按钮后,请先断开电源,确认解除了造成事故的原因后再解除急停,然后再接通电源。 Ø 进行以下操作时,请确认机器人动作范围内没有人和其他可能阻挡机器人动作的物品。 电源接通时。 利用软件操作机器人时。 试运行时。 示教再现时。 Ø 不慎进入机器人的动作范围内或者与机器人发生接触,都有可能引发人身伤害事故。机器人动作范围内的物品则可能会导致机器人设备受到不同程度的损坏。所以在运行前,请务必注意。 Ø 发生异常时,请立即按下急停按钮,再判断引起异常的原因,寻找解决的方法。 Ø 急停按钮位于控制柜柜门正面最右侧上方。 |
|
|
|
注 意 |
|
Ø 进行机器人操作之前要检查以下事项,有异常应及时修理或采取其他必要措施。 机器人和控制柜外部电缆遮盖物及外包装有无损坏。 机器人动作有无异常。 Ø 应在机器人开始使用前,正确理解“警告标志”的内容,确保人员和机器的安全。 |
|
警示标志的说明
机器人及控制柜上贴有如下警示牌,请严格按照警示牌上的注意事项对机器人及控制柜进行操作。
|
|
第 1 部分 机器人的认识
1.1 实验目的
1、 了解机器人的机构组成;
2、 掌握机器人的工作原理;
3、 熟悉机器人的性能指标;
4、 掌握机器人的基本功能及示教运动过程。
1.2 实验设备
1、 RBT-4T03S机器人一台;
2、 RBT-4T03S机器人控制柜一台;
3、 装有运动控制卡和控制软件的计算机一台。
1.3 实验原理
机器人是一种具有高度灵活性的自动化机器,是一种复杂的机电一体化设备。机器人按技术层次分为:固定程序控制机器人,示教再现机器人,智能机器人等。本课程所使用的机器人为四自由度机器人,为平面关节式,其轴线相互平行或垂直,能够在空间内进行定位。机器人采用步进电机驱动,主要传动部件采用可视化设计,控制简单,编程方便,是专为满足高等院校机电一体化、自动控制等专业进行机电及控制课程教学实验需要和相关工业机器人应用培训需要而最新开发的四自由度机器人,它是一个多输入多输出的动力学复杂系统,是进行控制系统设计的理想平台;它具有高度的能动性和灵活性,具有广阔的开阔空间,是进行运动规划和编程系统设计的理想对象。
机器人按技术层次分为:固定程序控制机器人,示教再现机器人,智能机器人等。本课程所使用的机器人为四自由度示教再现式机器人。整个系统包括四自由度机器人1台,控制柜1台,控制卡2块,实验附件1套(包括轴、轴座),机器人控制软件1套。
机器人采用平面关节式开链结构,即机器人各连杆由旋转关节或移动关节串联连接,如图1-1所示。各关节轴线相互平行或垂直。连杆的一端装在固定的支座上(底座),另一端处于自由状态,可安装各种工具以实现机器人作业。关节的作用是使相互联接的两个连杆产生相对运动。关节的传动采用模块化结构,由同步齿型带和谐波减速器等多种传动结构配合实现。
机器人各关节采用步进电机驱动,并通过Windows环境下的软件编程和运动控制卡实现对机器人的控制,使机器人能够在工作空间内任意位置精确定位。
1.4 技术参数一览表
|
结构形式 |
串联关节式 |
|
|
驱动方式 |
步进伺服混合驱动 |
|
|
负载能力 |
2Kg |
|
|
重复定位精度 |
±0.1mm |
|
|
动作范围 |
机构1 |
90°上下(0-220)mm、前后(0-158)mm、左右(0-240)mm |
|
机构2 |
0 |
|
|
机构3 |
90°、左右(0-240)mm |
|
|
机构4 |
左右(0-240)mm |
|
|
|
|
|
|
|
|
|
|
最大速度 |
机构1 |
60o / S |
|
机构2 |
60o / S |
|
|
机构3 |
60o / S |
|
|
机构4 |
60o / S |
|
|
|
|
|
|
|
|
|
|
最大展开半径 |
600mm |
|
|
高度 |
560mm |
|
|
本体重量 |
≤10Kg |
|
|
操作方式 |
示教再现/编程 |
|
|
电源容量 |
单相220V 50Hz4A |
|
1.5 各部位和动作轴名称
按照从下到上,从左到右的顺序,各轴名称依次分别为:
机构2、机构4、机构3、机构1,见图5-1所示。




图5-1 机器人各部位和动作轴名称
1.五自由度伺服直角坐标机器人系统介绍
五自由度伺服直角坐标机器人,末端气动手爪,配置双排立体化仓库,进行抓取出入库作业。机器人本体按照工业直角坐标机器人结构设计,体现机器人基础形式的功能和特点。
PLC主机,驱动器,继电器等电控元件与布线布置在挂板面,端子板,内部结构与位置完全可视;面板上的布置按钮,安全拔插接口。电机驱动器等,并配备防护和标识。
2.运动步骤
我们将机体各个机构分解为;构1、机构2、机构3、机构4。例如我们将A处的物块通过伺服直角坐标机器人移动到B处(如图1)。
步骤二:机构2中电机a正转,使滑块上升,从而使物块被抬起,(如图2)物块被抬离5mm后电机停止转动。

图2
步骤三:完成步骤二后,随即电机c正转,滑块滑至机构1的最前头,使物块被拖出仓库(如图3)

图3
步骤四:将物块从仓库里拖出后,接下来将货物旋转900,因而电机得旋转带轮,通过带轮传动使机构3带动机构1顺时针转动900。(图4)
图4
步骤五:旋转后的物品需向前端移动,继而电机b正转,带动机构2中的滑块前行。使物块继续前行。(如图5)
图5
步骤六:物块前行后需要将物块提升到B处的位置。此时电机a反转使机构3中的滑块上升至B处的高度时,得高出5mm,便于将物体送至仓库中。(如图6)
图6
步骤七:达到B处高度时,还需要继续对物体进行旋转,因而电机得旋转带轮,通过带轮传动使机构3带动机构1逆时针转动900。(如图7)
图7
步骤八:通过旋转后将物块送进仓库里。此时的电机正转,机构2伸进仓库。(如图8)

图8
步骤九:物块送进仓库里后电机a需要下沉20mm便于将托盘拖出来。
步骤十:机构1、2、3原路归位。
经过十个步骤将物块由A处存储至B处。此过程为五自由度伺服直角坐标机器人系统简单运动步骤
url: http://www.51lm.cn/p/templates/cn/show.php?cid=0&aid=3075
