|
|||
ml1em_um
型号: PXF3298
INTECO Krakow
Magnetic Levitation System
(MLS)
User’s Manual
version 1.6 for MATLAB 6.5
Kraków, March 2005
Table of contents
INTRODUCTION ..............................................................................................................3
1.1 LABORATORY SET-UP ............................................................................................3
1.2 HARDWARE AND SOFTWARE REQUIREMENTS.........................................................4
1.3 FEATURES OF MLS ................................................................................................5
1.4 TYPICAL TEACHING APPLICATIONS ........................................................................5
1.5 SOFTWARE INSTALLATION .....................................................................................5
2 ML MAIN WINDOW ................................................................................................6
2.1 IDENTIFICATION .....................................................................................................7
2.1.1 Sensor ...........................................................................................................7
2.1.2 Actuator static mode...................................................................................11
2.1.3 Minimal control ..........................................................................................14
2.1.4 Actuator dynamic mode..............................................................................17
2.2 MAGLEV DEVICE DRIVERS ...................................................................................19
2.3 SIMULATION MODEL & CONTROLLERS................................................................22
2.3.1 Open Loop ..................................................................................................22
2.3.2 PID..............................................................................................................28
2.3.3 LQ ...............................................................................................................31
2.3.4 LQ tracking.................................................................................................34
2.4 LEVITATION .........................................................................................................37
2.4.1 PID..............................................................................................................37
2.4.2 LQ ...............................................................................................................39
2.4.3 LQ tracking.................................................................................................41
3 DESCRIPTION OF THE MAGNETIC LEVITATION CLASS PROPERTIES44
3.1 BASEADDRESS.....................................................................................................45
3.2 BITSTREAMVERSION............................................................................................45
3.3 PWM...................................................................................................................45
3.4 PWMPRESCALER ................................................................................................46
3.5 STOP ....................................................................................................................46
3.6 VOLTAGE.............................................................................................................46
3.7 THERMSTATUS ....................................................................................................47
3.8 TIME ....................................................................................................................47
3.9 QUICK REFERENCE TABLE ....................................................................................47
Introduction
The Magnetic Levitation System MLS is a complete (after assembling and software installation) control laboratory system ready to experiments. The is an ideal tool for demonstration of magnetic levitation phenomena. This is a classic control problem used in many practical applications such as transportation -magnetic levitated trains, using both analogue and digital solutions to maintain a metallic ball in an electromagnetic field. MLSconsists of the electro-magnet, the suspended hollow steel sphere, the sphere position sensors, computer interface board and drivers, a signal conditioning unit, connecting cables, real time control toolbox and a laboratory manual. This is a single degree of freedom system for teaching of control systems; signal analysis, real-time control applications such as MATLAB. MLS is a nonlinear, open-loop unstable and time varying dynamical system. The basic principle of MLS operation is to apply the voltage to an electromagnet to keep a ferromagnetic object levitated. The object position is determined through a sensor. Additionally the coil current is measured to explore identification and multi loop or nonlinear control strategies. To levitate the sphere a real-time controller is required. The equilibrium stage of two forces (the gravitational and electro-magnetic) has to be maintained by this controller to keep the sphere in a desired distance from the magnet. When two electromagnets are used the lower one can be used for external excitation or as contraction unit. This feature extends the MLS application and is useful in robust controllers design. The position of the sphere may be adjusted using the set-point control and the stability may be varied using the gain control. Two different diameter spheres are provided. The band-width of lead compensation may be changed and the stability and response time investigated. User-defined analogue controllers may be tested.
1.1 Laboratory set-up
A schematic diagram of the laboratory set-up is shown in Fig. 1.
Electromagnet
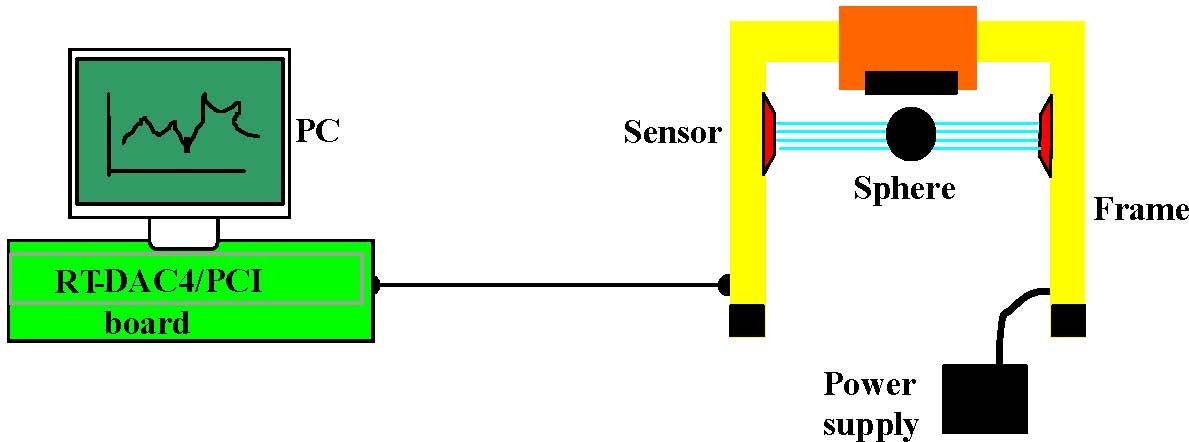
Fig. 1. MLS laboratory set-up
One obtains the mechanical unit with power supply and interface to a PC and the
dedicated RTDAC4/PCI I/O board configured in the Xilinx® technology. The software
operates in real time under MS Windows® 98/NT/ 2000/XP using MATLAB® 6.5 , RTW
and RTWT toolboxes. Control experiments are programmed and executed in real-time in the MATLAB/Simulink environment. Thus it is strongly recommended to a user to be familiar with the RTW and RTWT toolboxes. One has to know how to use the attached models and how to create his own models. The control software for the MLS is included in the MLS toolbox. This toolbox uses the RTWT and RTW toolboxes from MATLAB.MLS Toolbox is a collection of M-functions, MDL-models and C-code DLL-files that extends the MATLAB environment in order to solve MLS modelling, design and control problems. The integrated software supports all phases of a control system development: • on-line process identification,
- control system modelling, design and simulation,
- real-time implementation of control algorithms.
MLS Toolbox is intended to provide a user with a variety of software tools enabling: • on-line information flow between the process and the MATLAB environment,
- real-time control experiments using demo algorithms,
- development, simulation and application of user-defined control algorithms.
MLS Toolbox is distributed on a CD-ROM. It contains software and the MLS User’s Manual. The Installation Manual is distributed in a printed form.
1.2 Hardware and software requirements.
Hardware
Hardware installation is described in the Assembling manual. It consists of:
- Electromagnet
- Ferromagnetic objects
- Position sensor
- Current sensor
- Power interface
- RTDAC4/PCI measurement and control I/O board
- Pentium or AMD based personal computer.
Software
For development of the project and automatic building of the real-time program is required. The following software has to be properly installed on the PC:
- MS Windows 2000 or Windows XP. MATLAB version 6.5 with Simulink 5. Signal Processing Toolbox and Control Toolbox from MathWorks Inc. to develop the project.
- Real Time Workshop to generate the code.
- Real Time Windows Target toolbox.
- The MLS toolbox which includes specialised drivers for the MLS System, These drivers are responsible for communication between MATLAB and the RTDAC4/PCI measuring and control board.
- MS Visual C++ to compile the generated code.
1.3 Features of MLS
- Aluminium construction
- Two ferromagnetic objects (spheres) with different weight
- Photo detector to sense the object position
- Coil current sensor
- A highly nonlinear system ideal for illustrating complex control algorithms
- None friction effects are present in the system
- The set-up is fully integrated with MATLAB®/Simulink® and operates in real-time in MS Windows® 98/2000/XP
- The software includes complete dynamic models.
1.4 Typical teaching applications
- System Identification
- SISO, MISO, BIBO controllers design
- Intelligent/Adaptive Control
- Frequency analysis
- Nonlinear control
- Hardware-in-the-Loop
- Real-Time control
- Closed Loop PID Control
1.5 Software installation
Insert the installation CD and proceed step by step following displayed commands.
2 ML Main Window
The user has a rapid access to all basic functions of the MLS System from the MLS Control Window. In the Matlab Command Window type: ML_Main and then the Magnetic Levitation Main window opens (see Fig. 2).
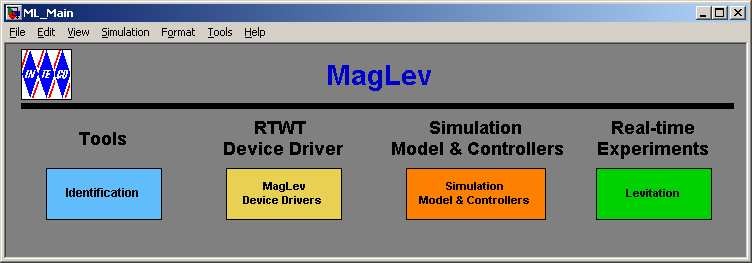
Fig. 2. The Magnetic Levitation Main window
In the ML Main window one can find: testing tools, drivers, models and demo applications. You can see a number of pushbuttons ready to use.
The ML Main window shown in Fig. 2 contains four groups of the menu items:
- Tools – identification
- RTWT Device Driver – MagLev device driver
- Simulation model and controllers
- Real-time experiments – levitation
Section 2 is divided into four subsections. Under each button in the ML Main window one can find the respective portion of software corresponding to the problem announced by the button name. These problems are described below in four consecutive subsections.
2.1 Identification
If we click the identification button the following window (see Fig. 3) opens. There are the default values of all parameters defined by the manufacturer. Nevertheless, a user is equipped with a number of identification tools. He can perform the identification procedures to verify and if necessary modify static and dynamic characteristics of MLS.
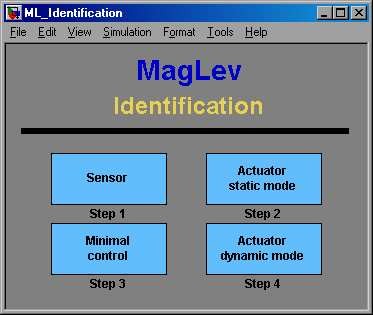
Fig. 3. The identification window Four identification steps have been preprogrammed. They are described below.
2.1.1 Sensor
In this subsection the position sensor characteristics is identified. If you click the Sensor button the following window opens (see Fig. 4)
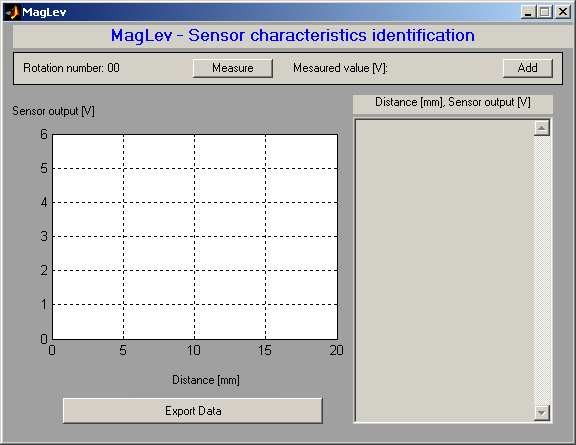
Fig. 4. Sensor signal in [V] vs. the sphere distance from the electromagnet in [mm]
The following procedure is required to identify the characteristics.
- 1.
- Screw in the screw bolt into the seat.
- Screw in the black sphere and lock it by the butterfly nut. Notice, that the sphere is fixed to the frame!
- Turn round the screw so the sphere be in touch with the bottom of the electromagnet.
- 4.
- Switch on the power supply and the light source.
- Start the measuring and registration procedure. It consists of the following steps:
- Push the Measure button – the voltage from the position sensor is stored and displayed as Measured value [V]. One can correct this value by measuring it again.
° Push the Add button – the measured value is added to the list. A rotation number value is automatically enlarged by one (see Fig. 5).
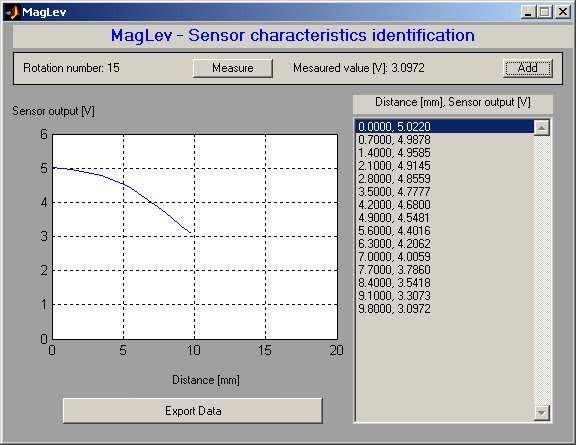
Fig. 5. Characteristics of the sphere position sensor
° Manually make one full rotation of the screw. ° Repeat three last steps so many times as none change in the voltage vs. position characteristics is observed.
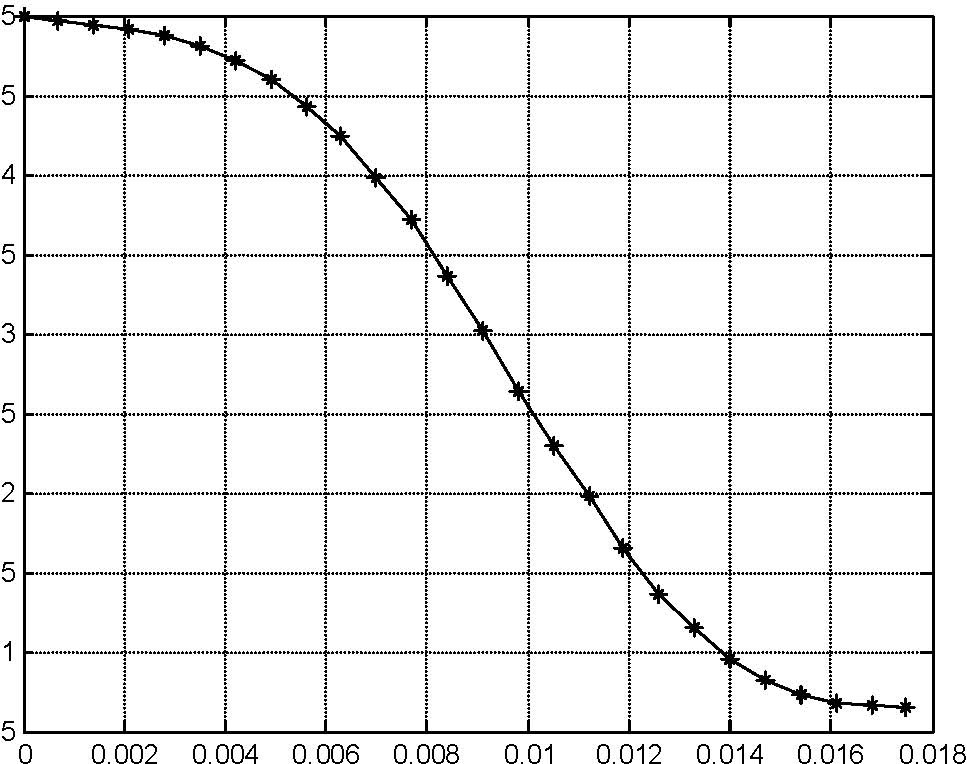
7. Push the Export Data button – the data are written to the disc (see Fig. 6). Data are stored in the ML_Sensor.mat file as the SensorData structure with the following signals: Distance_mm, Distance_m andSensor_V.
In the Simulink real-time models the above characteristics is used as a Look-Up-Table model. The block named Position scaling is located inside the device driver block of MLS (see Fig. 7). Notice, that the characteristics shows meters vs. Volts. In Fig. 6 there were shown Volts vs. meters. It is obvious that we require the inverse characteristics because we need to define the output as the position in meters.
Sensor signal [V]
4.5
3.5
2.5
1.5
0.5
Distance [m]
Fig. 6. The sensor characteristics after being measured and exported to the disc
[V] to [m]
Fig. 7. The Simulink Look Up Table model representing the position sensor characteristics
If we click this block the window shown in Fig. 8 opens. Any time you like to modify the sensor characteristics you can introduce new data related to the voltage measured by the sensor. The voltage corresponds to the distance of the sphere set by a user while the identification procedure is performed. The sensor characteristics is loaded from the ML_sensor.dat file which has been created during the identification procedure. If the curve of the Position scaling block is not visible please load the file with data.
The sensor characteristics can be approximated by a polynomial of a given order. For example, we can use a fifth order polynomial.
P(x) = p5 x5 + 2 + p0
p5 =−25697073504.59, p4 = 1245050011.25, p3 =−18773635.92, p2 = 79330.24, p1 =−150.21 and p0 = 5.015.
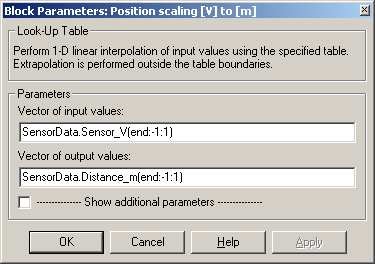
Fig. 8. Look-Up Table to be fulfilled with vectors of input and output values
The approximated polynomial (the red line) is shown in Fig. 9. The polynomial approximation will be not used in this manual due to the fact that the entire model is built in Simulink. Therefore we recommend to model the characteristics as a Look-Up Table block (see Fig. 7 and Fig. 8).
5.5
4.5
3.5
2.5
1.5
0.5
Distance [m]
Fig. 9. The sensor characteristics approximated by the fifth order polynomial
Sensor signal [V]
2.1.2 Actuator static mode
In this subsection we examine static features of the actuator i.e. the electromagnet. Notice, that the sphere is not present!
Click the Actuator static mode button and the window shown in Fig. 10 opens.
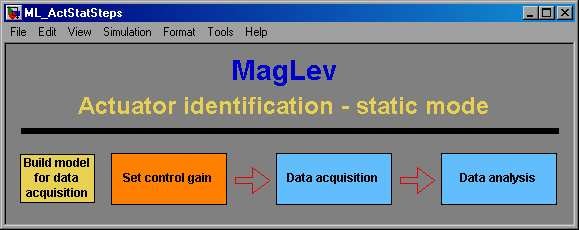
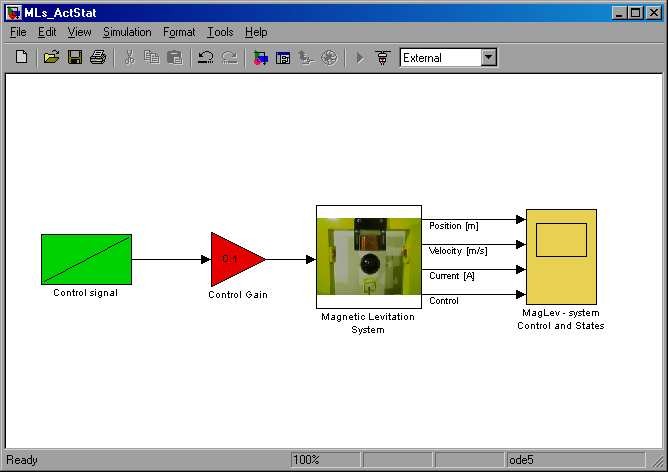
Now, we can perform button by button the operations depicted in Fig. 10. We begin from the Build model for data acquisition button. The window of the real-time task shown in Fig. 11 opens and the RTW build command is executed (the executable code is created).
Click the Set control gain button. It results in activation of the model window and the following message is displayed (see Fig. 12):
In Fig. 11 one can notice the Control signal block. In fact the control signal increases linearly. We can modify the slope of this signal changing the Control Gain value.
Click the Data acquisition button. Within 10 seconds data are acquired and stored in the workspace.
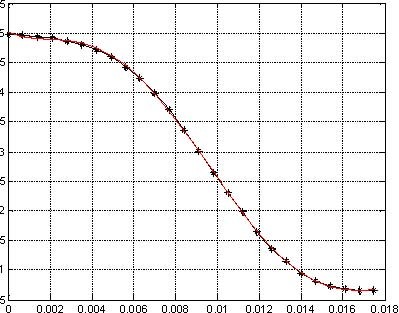
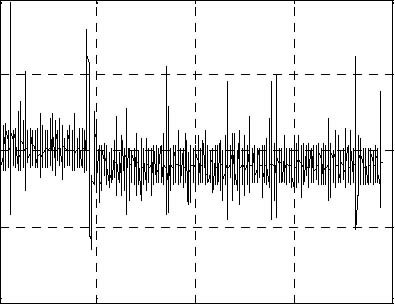
Click the Data analysis button. The collected values of the coil current are displayed in Fig. 13.
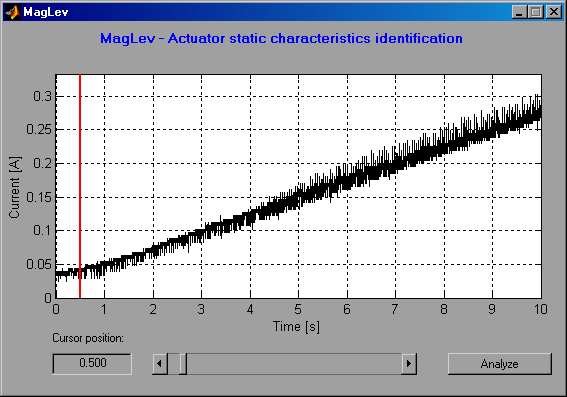
The characteristics is linear except a small interval at the beginning. We can locate the cursor at the point where a new line slope starts (see the red line in the picture). We can move the cursor in two ways: by writing down a value into the edition window or by drugging the slider. In this way the current characteristics is prepared to be analyzed in the next step. The line is divided into two intervals: the first – from the beginning of measurements to the cursor and the second – from the cursor to the end of measurements.
After setting the cursor position, consequently, click the Analyze button. The following message (see Fig. 14) appears. We obtain the dead zone values corresponding to the control and current. The constants a and b of the linear part are the parameters of the line equation: i(u) = au + b .
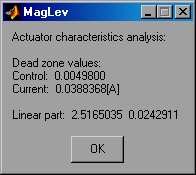
These parameters, namely: = 0.00498 , = 0.03884 , k = 2.5165 and ci = 0.0243
uMIN x3MIN i are going to be used in the simulation model in section 2.3.1 (see the differential equations parameters).
To obtain a family of static characteristics for linear controls with different slopes we repeat the following experiment. We apply a PWM voltage signal in the time interval from 0 to 10 s. The PWM duty cycles for the subsequent ten experiments are varying linearly in the ranges: [0, 0.1], [0, 0.2], ..., [0, 1.0] (see Fig. 16 ).
Control -PWM duty
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1 0
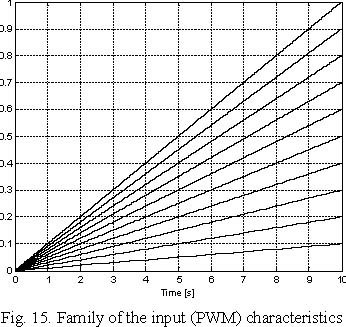
012 34 567 8910 Time [s]
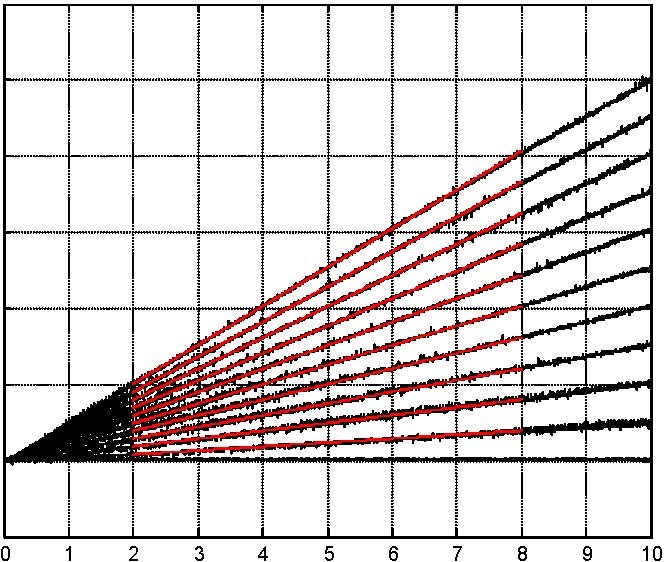
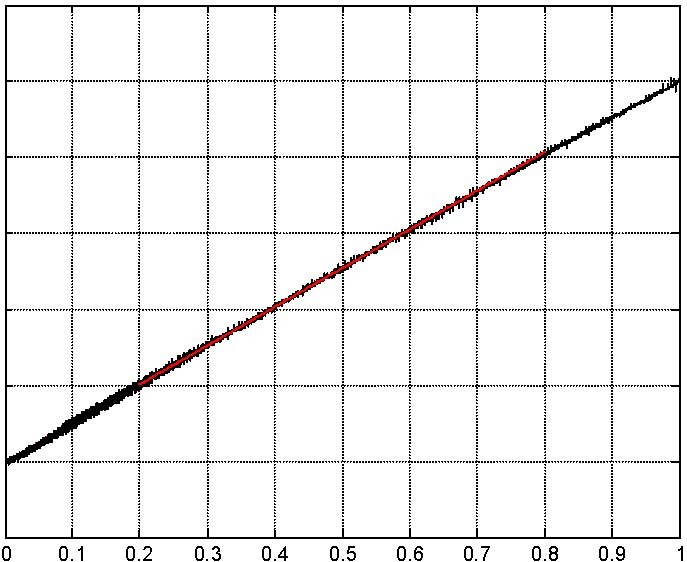
Consequently, we obtain diagrams of the currents corresponding to ten experiment (see Fig. 16). Each characteristics is approximated by a polynomial of the first order. Finally the entire current vs. PWM duty cycle relation is depicted (black points) in Fig. 17. The red line represents the linear approximation of measurements. We obtain the following numerical values of linear characteristics:
i(u) = kiu + c ; a = 2.60798876298869, b = −0.01077522109792.
The constant c is obtained for u = 0. The family of linear characteristics is used to obtain the coefficients ki vs. control u.
3
2.5 2
1.5 1
0.5
0 -0.5
Time [s]
Fig. 16. Family of the output (current) characteristics
Current [A]
Current [A]
3
2.5 2
1.5 1
0.5 0
-0.5 Control -PWM duty
Fig. 17. Current vs. PWM duty cycle
2.1.3 Minimal control
In this subsection we examine the minimal control to cause a forced motion of the sphere from the supporting structure (tablet) toward the electromagnet against the gravity force. Notice, that in this experiment the sphere is not levitating! It is kept nearby the electromagnet by the supporting structure.
Click the Minimal control button and the window shown in Fig. 18 opens.
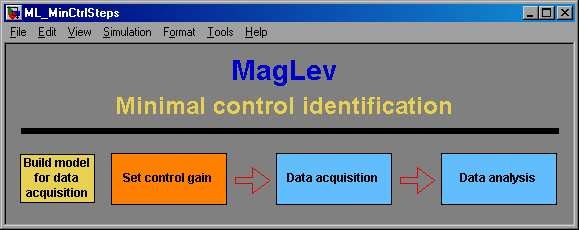
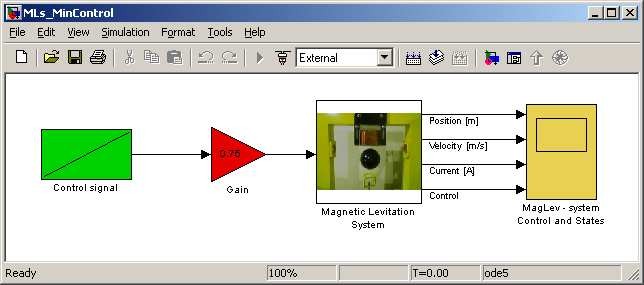
Now, we proceed button by button the operations depicted in Fig. 18 similarly to the procedure described in the previous subsection. We begin from the Build model for data acquisition button. The window of the real-time task shown in Fig. 19 opens.
Click the Set control gain button. It results in activation of the model window and the following message is displayed (see Fig. 20).

It means that we can set a duty cycle of the control PWM signal. The sphere is located on the support and the experiment starts. Click the Data acquisition button. A forced motion of the ball toward the electromagnet begins.
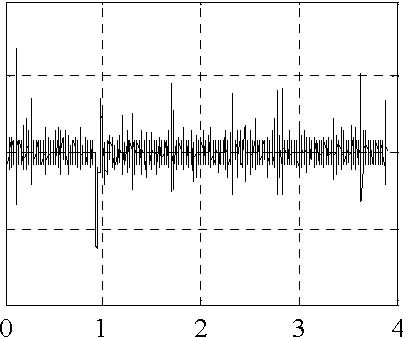
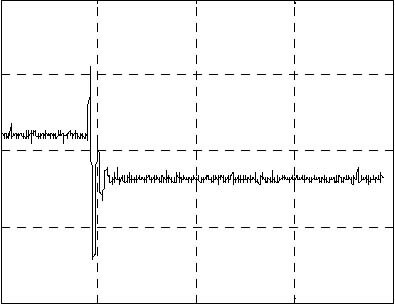
Click the Data analysis button. The collected values of the ball position are displayed in Fig. 21.
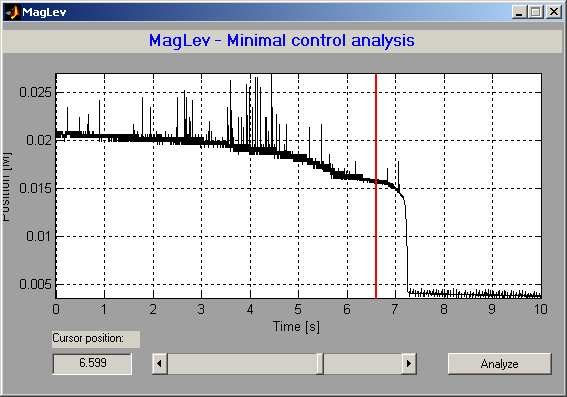
The sphere motion is visible. We can locate the cursor at the point slightly before a position jump occurs (takes place) (see the red line in the picture). We can move the cursor in two ways: by writing down a value into the edition window or by drugging the slider. In this way the acquired data are prepared to be analyzed in the next step.
After setting the cursor position, consequently, click the Analyze button. The following message (see Fig. 22) appears. This information means that the sphere located 15.82 mm from the electromagnet begins to move toward it when the PWM control over-crosses the 0.49485 duty cycle value.
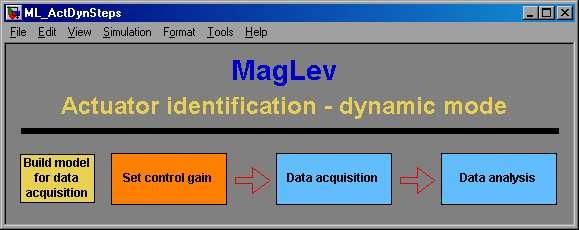
2.1.4 Actuator dynamic mode
In this subsection we examine dynamic features of the actuator i.e. the electromagnet. It means that the moving sphere generates an electromotive force (EMF). EMF diminishes the current in the electromagnet coil. Click the Actuator static mode button and the window shown in Fig. 23 opens.
A user should perform three experiments: without the sphere (Without ball), with the sphere on the supported structure (Ball on the tablet) and with the sphere fixed to the rigid screw (Ball fixed).
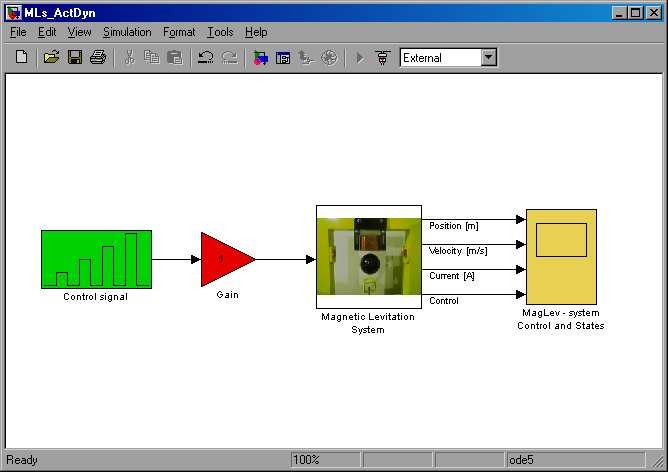
We begin from the Build model for data acquisition button. The window of the real-time task shown in Fig. 24 opens. We have to set the control gain. If we are going to modify the control magnitude then we set the default gain to 1 and the subsequent duty cycles to: 0.25, 0.5, 0.75 and 1. Click the Data acquisition button and save data under a given file name.
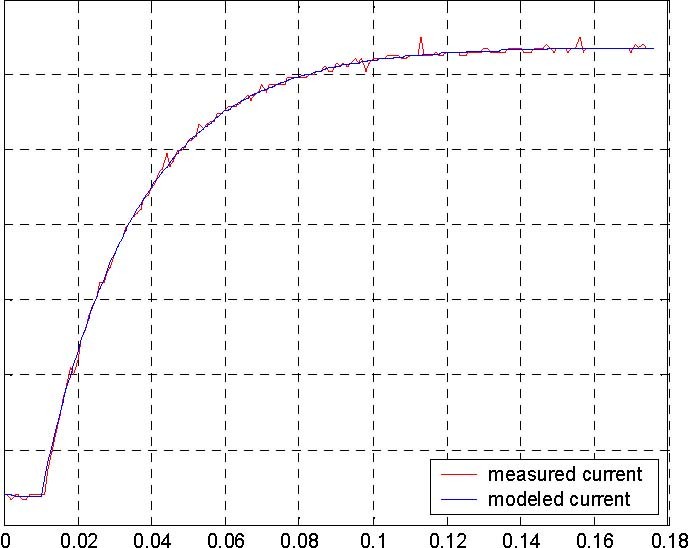
Click the Data analysis button. It calls the ml_find_curr_dyn.m file. The following window opens (see Fig. 25). The parameters optimization procedure starts. The optimization routine is based on themlm_current.mdl model.
When ml_find_curr_dyn.m runs the optimization function fminsearch is executed. Fminsearch uses the ml_opt_current.m file.
The ki and fi parameters are iteratively changed during the optimization procedure. The current curve is fitted four times. This is due to the control signal form.
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0 Time [s]
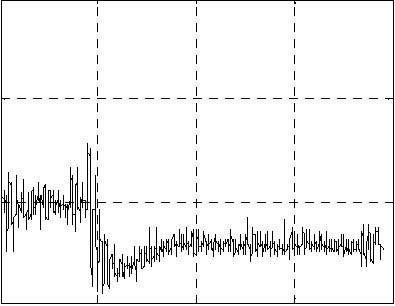
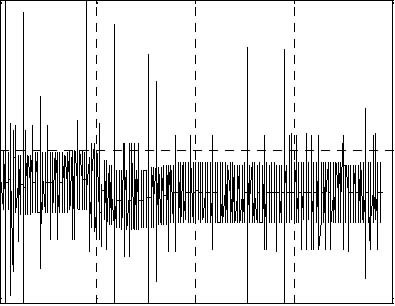
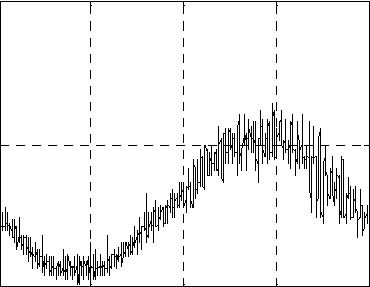
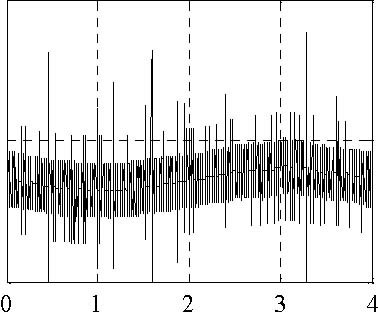
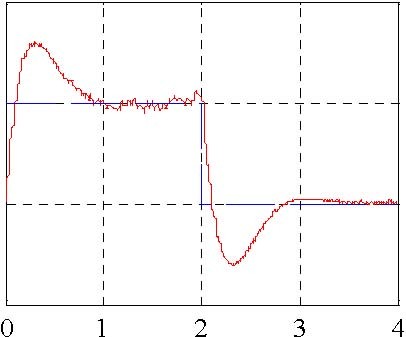
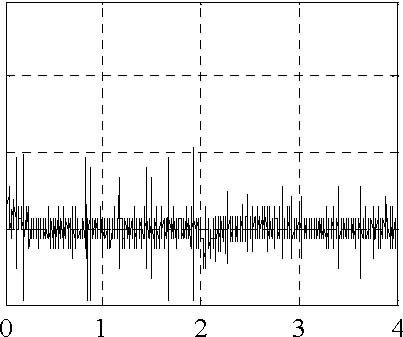
Fig. 25. Current curve – the fitting result of the optimization procedure
Finally the information about the mean values is displayed (see Fig. 26). The advanced user can use the functions code to perform a detailed analysis.
Current [A]
2.2 MagLev device drivers
The driver is a software go-between for the real-time MATLAB environment and the RT-DAC4/PCI acquisition board. The control and measurements are driven. Click the RTWT Device Drivers button in theMagnetic Levitation Main window. The following window opens (see Fig. 27).
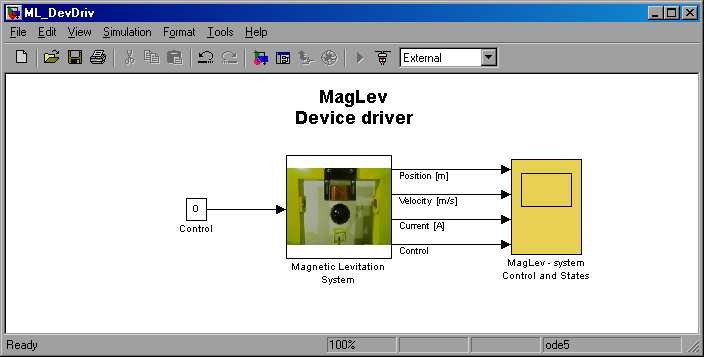
Notice that the scope block writes data to the MLExpData variable defined as a structure with time. The structure consists of the following signals: Position [m], Velocity [m/s], Current [A], Control [PWM duty 0÷1]. The interior of the Magnetic Levitation System block, it means the interior of the driver block is shown in Fig. 28.
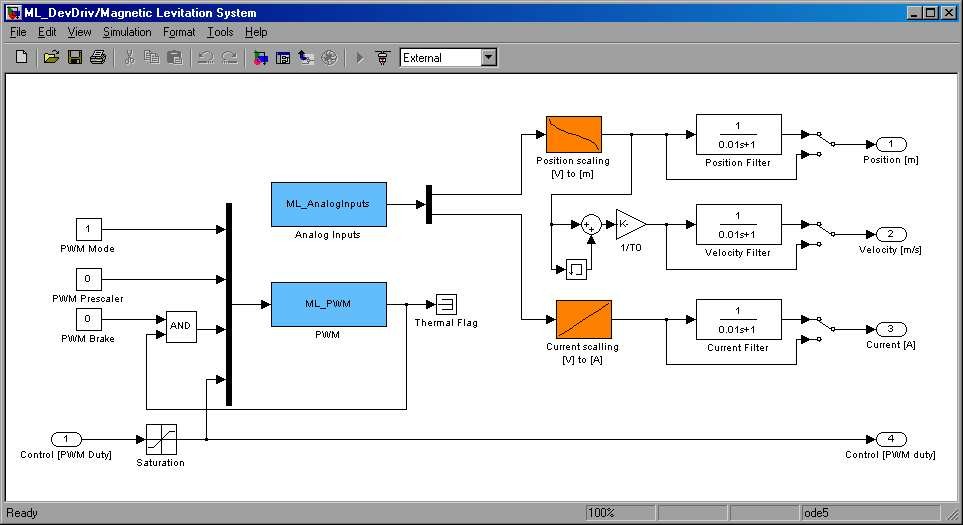
In fact there are two drivers: ML_AnalogInputs and ML_PWM. There are also two characteristics: the ball position [m] vs. the position sensor voltage [V] and the coil current vs. the current sensor voltage [V]. The driver uses functions which communicates directly with a logic stored at the RT-DAC4/PCI board. When one wants to build his own application one can copy this driver to a new model.
![]() Do not introduce any changes inside the original driver. They can be introduced only inside its copy!!! Make a copy of the installation CD.
Do not introduce any changes inside the original driver. They can be introduced only inside its copy!!! Make a copy of the installation CD.
The Simulink Look-Up-Table model named Position scaling (see Fig. 7) representing the position sensor characteristics has been already described. Now let us present the second Simulink Look-Up-Table model named Current scaling (see Fig. 29).
Current scalling
[V] to [A]
Fig. 29. The Simulink Look-Up-Table model representing the current sensor characteristics
To build the above characteristics it is necessary to measure the current of the electromagnet coil. The algorithm in the computer is the source of the desired value of the control in the form of the voltage PWM signal. This PWM is the input voltage signal transferred to the LMD18200 chip of the power interface. Due to a high frequency of the PWM signal the measured current values correspond to the average current value in the coil. This characteristics has been built by the manufacturer. It is not recommended to repeat measurements by a user because to do so one must unsolder the input wires of the electromagnet. On the basis of the data given in the table below one can generate his own characteristics. For a fixed PWM frequency and a variable duty cycle the coil amperage is measured. The measured data are given below in the table.
| PWM duty cycle | amperage [A] | voltage [V] |
|---|---|---|
| 0 | 0 | 0.374811 |
| 0.1 | 0.25 | 0.262899 |
| 0.2 | 0.51 | 0.510896 |
| 0.3 | 0.77 | 0.752465 |
| 0.4 | 1.02 | 0.993620 |
| 0.5 | 1.28 | 1.229133 |
| 0.6 | 1.52 | 1.459294 |
| 0.7 | 1.74 | 1.651424 |
| 0.8 | 1.99 | 1.875539 |
| 0.9 | 2.21 | 2.076814 |
| 1 | 2.43 | 2.269865 |
The current [A] vs. voltage [V] characteristics is shown in Fig. 30.
Current [A]
2.5 2
1.5
1
0.5
0
0 0.5 1 1.5 2 2.5 Measured signal [V]
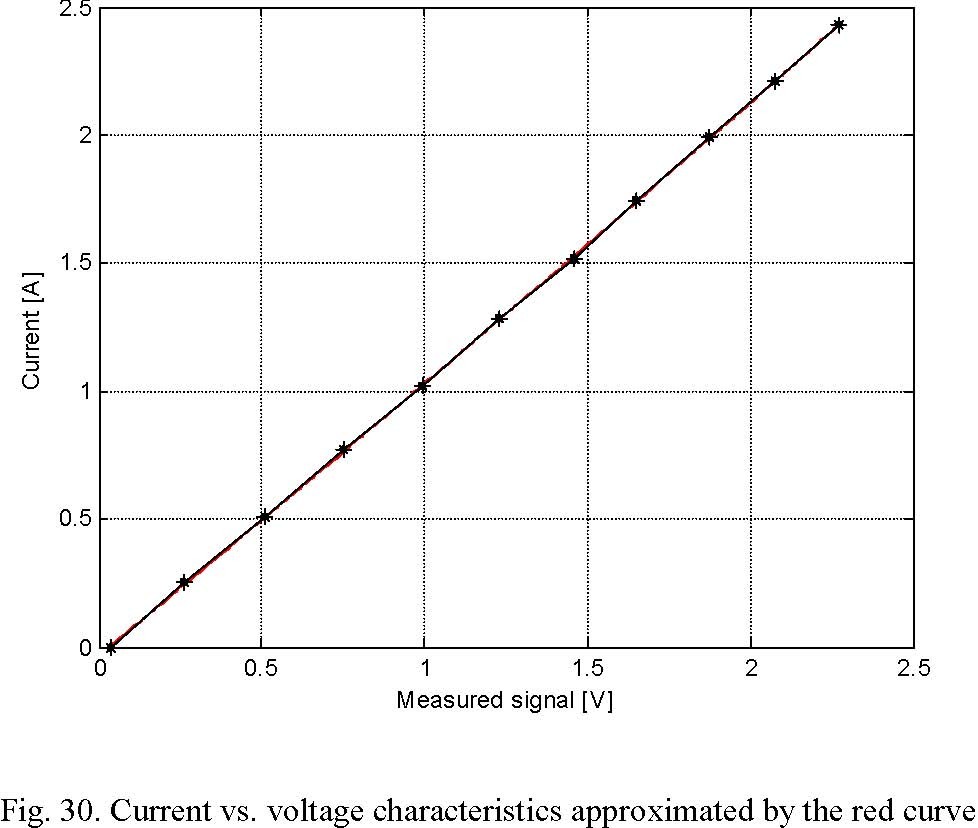
The characteristic can be approximated by a polynomial of the second order: I (U ) = aU 2 + aU + a
2 10
where:
I – current, U – voltage from the A/D converter a0, a1, a2 -identified parameters of the polynomial
a2 = 0.0168 a1 = 1.0451 a0 =−0.0317
2.3 Simulation Model & Controllers
Click the Simulation Model & Controllers button in the Magnetic Levitation Main window. The following window opens (see Fig. 31).

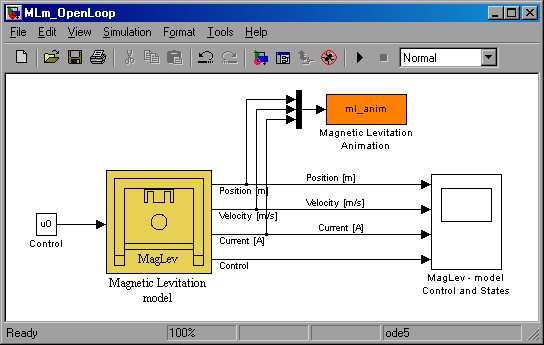
2.3.1 Open Loop
° Simulink model
Next, you can click the first Open Loop button. The following window opens (see Fig. 32). Notice that the scope block writes data to the MLSimData variable defined as a structure with time. The structure consists of the following signals: Position [m], Velocity [m/s], Current [A], Control [PWM duty 0÷1].
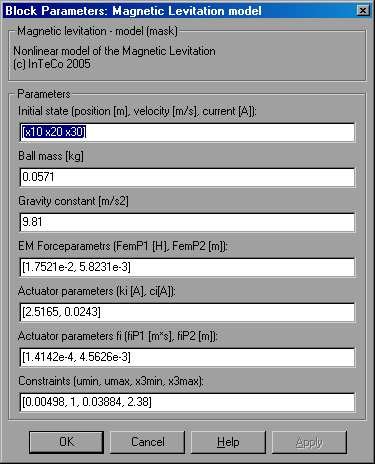
If you click the Magnetic Levitation model block the following mask opens (see Fig. 33).
In Fig. 32 enter into the File option and choose Look under mask. The interior of the Magnetic Levitation model block shown in Fig. 34 opens.
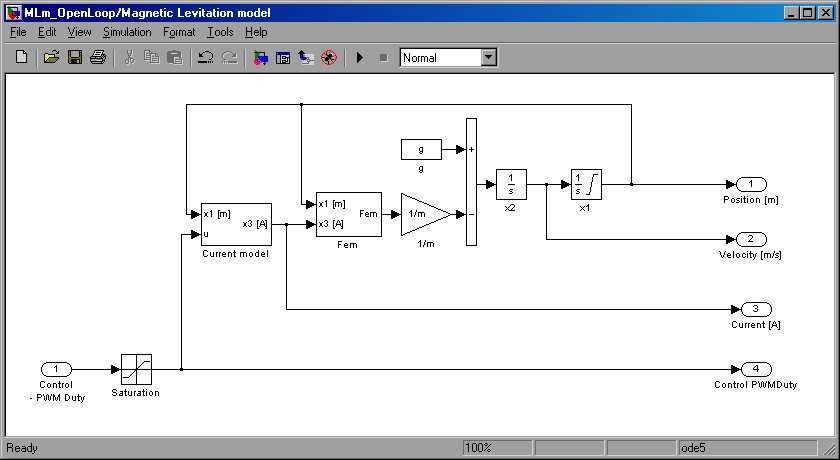
Notice two integrator blocks in Fig. 34. In fact we deal with third order dynamical system. The third integrator related to the coil current is visible in Fig. 35.
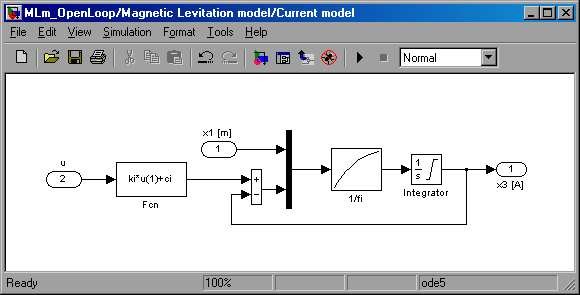
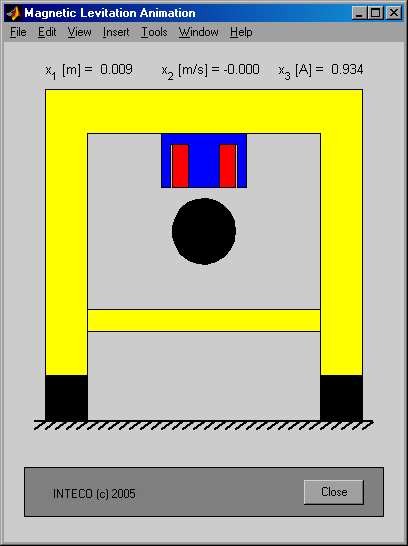
The Simulink model is also equipped with the animation block. When a simulation starts the following window opens (see Fig. 36). The animation screen is updated in every sample time. All state variables: the ball position and velocity, and also the coil current are animated.
° Mathematical model
The Simulink model is consistent with the following nonlinear mathematical model Model nieliniowy
x# = x
12
# em
x2 =− F + g
m
13 )
x# =(ku + c − x
3 ii
fi (x1)
2 emP 11
Fem = x3 F exp( − x )
FF
emP 2 emP 2
fx
iP 11
f (x ) = exp( − )
i 1 ff
iP 2 iP 2
where:
x1 ∈[0, 0.016], x2 ∈ℜ , x3 ∈[x3MIN , 2.38] u ∈[,1]
uMIN
The parameters of the above equations are given in the table below
| Parameters | Values | Units |
|---|---|---|
| m | 0.0571 (big ball) | [kg] |
| g | 9.81 | [m/s2] |
| emF | function of x1 and x3 | [N] |
| emP1F | 1.7521⋅10-2 | [H] |
| emP2F | 5.8231⋅10-3 | [m] |
| )(x1fi | function of x1 | [1/s] |
| iP1f | 1.4142⋅10-4 | [m·s] |
| iP2f | 4.5626⋅10-3 | [m] |
| ci | 0.0243 | [A] |
| ik | 2.5165 | [A] |
| x3MIN | 0.03884 | [A] |
| uMIN | 0.00498 |
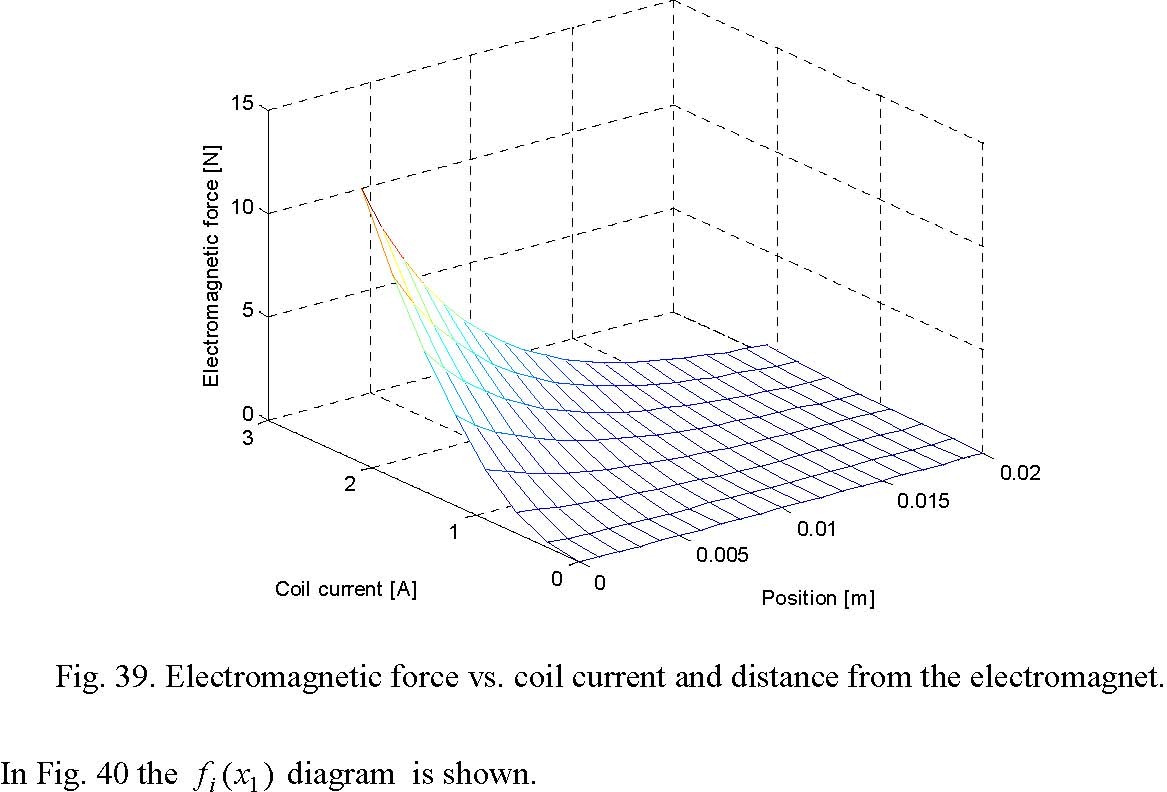
The electromagnetic force vs. position diagram is shown in Fig. 37 and the electromagnetic force vs. coil current diagram is shown respectively in Fig. 38.
3
2.5
Electromagnetic force [N]
2
1.5
1
0.5
0
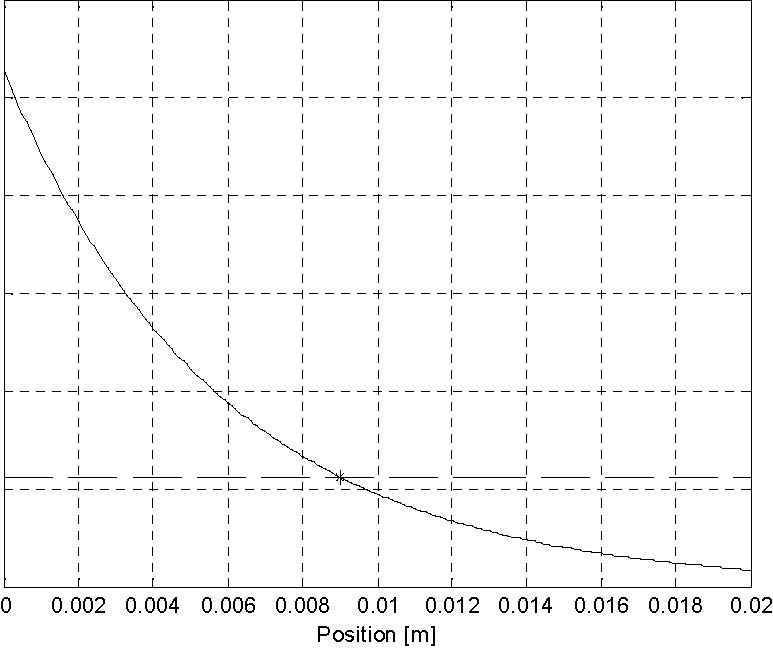
Fig. 37. Electromagnetic force vs. position. The gravity force of the big ball (dashed horizontal line) is crossing the curve at the 0.009 m distance from the electromagnet
3.5 3
Electromagnetic force [N]
2.5 2
1.5 1
0.5 0
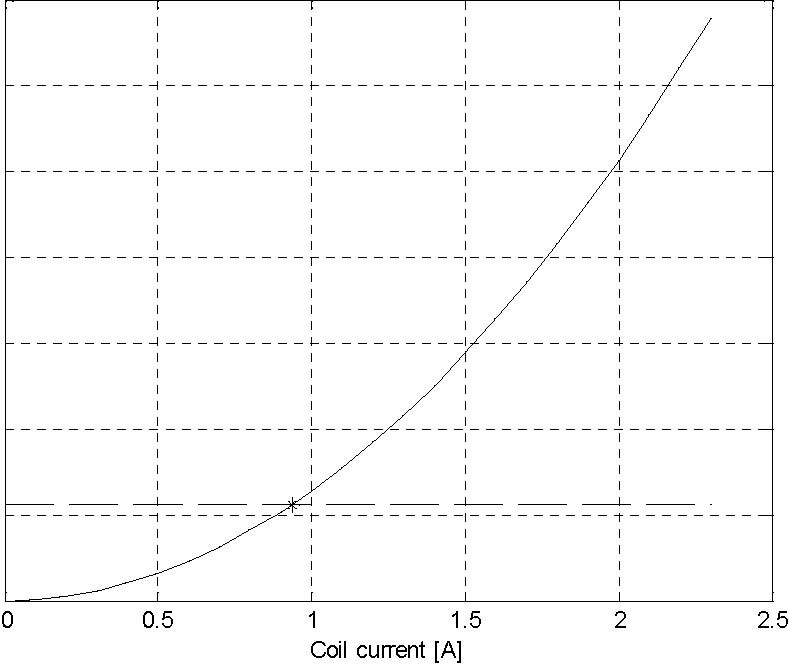
Fig. 38. Electromagnetic force vs. coil current. The gravity force of the big ball (dashed horizontal line) is crossing the curve at the 0.9345 A coil current
The electromagnetic force depends on two variables: the ball distance from the electromagnet and the current in the electromagnetic coil. This is clearly presented in Fig.
37 and Fig. 38. We can show these dependencies in three dimensional space (see Fig. 39). The ball is stabilized at [x , x , x ]= col(9⋅10−3, 0, 9.345⋅10−1). It means that the ball
123 velocity remains equal to zero. The ball is levitating kept at the 9 mm distance from the bottom of the electromagnet. The 0.9345 A current flowing through the magnetic coil is the appropriate value to balance the gravity force of the ball.
00
Coil current [A] Position [m]
0.035
0.03
0.025
0.02
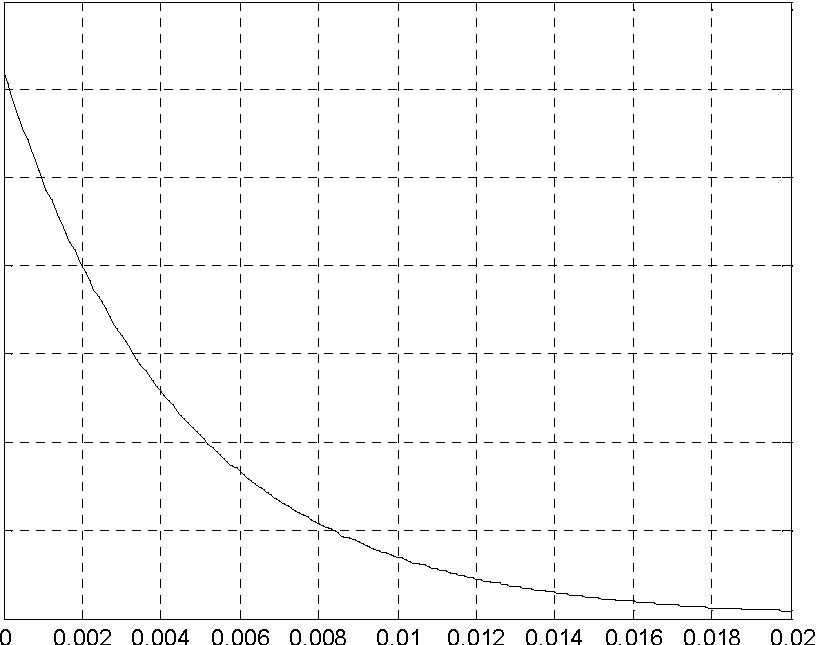
fi(x1)
0.015
0.01
0.005 0
Position [m]
Fig. 40. Function fi (x1)
° Linear continuous model
ML is a highly nonlinear model. It can be approximated in an equilibrium point by a linear model. The linear model can be described by three linear differential equations of the first order in the form:
x# = Ax + Bu
y = Cx
» 010 ÿ» 0 ÿ … Ÿ…Ÿ
A = a 0 a , B = 0
… 2,1 2,3 Ÿ Ÿ
…a3,1 0 a3,3 Ÿ⁄ …b3 Ÿ⁄
The elements of the A matrix are expressed by the nonlinear model parameters in the following way:
2 x10
xF −
30 emP 1 FemP 2
a = e
2,1 2
mF
emP 2
− x10
2xF
30 emP 1 FemP 2
a2,3 =− e mF
emP 2
2
≈ − x ’
Δ iP 1 fiP 2 ÷
a = −(ku + c − x )− fe 10
3,1 ii 30 2
Δ f ÷
« iP 2 ◊
a =− f −1(x )
3,3 i 10
b = kf −1(x )
3 ii 10
The C vector elements correspond to an applied controller. For example, The PID controller shown in the next subsection requires C in the form:
C =[100].
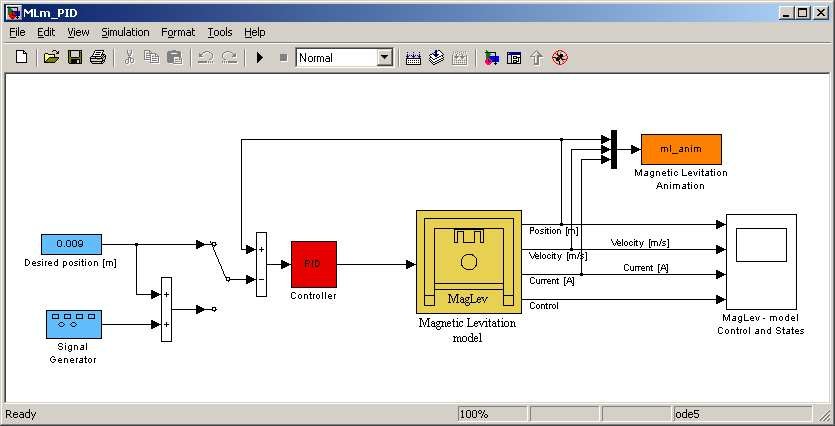
2.3.2 PID
If you click the PID button the following windows open (see Fig. 41). The interior of the Magnetic Levitation model block has been shown in Fig. 34. The PID controller is built in the form:
d
u(t) = K ⋅e(t) + Ke(t)dt + Ke(t)
PI D
—
dt
e(t) = x(t) − x0(t)
| PK | IK | DK |
|---|---|---|
| 130 | 500 | 6 |
The simulated stabilization results are shown below.
-3
x 10
0.15
10
Coil current [A]
Ball position [m]
Ball velocity [m/s]
0.1
0.05
0 -0.05
9
8
Time [s] T ime [s]
1.5
0.8
Control -PWM duty
0.6
0.4
0.2 1
0.5
0
0 Time [s] Time [s] Fig. 42. PID simulation – the desired position is a constant.
-3 -3
x10 x10
11
2
10
1
Ball position [m]
9
8
Ball velocity [m/s]
0
-1
7
-2
Time [s]
1.05
0.4

Control -PWM duty
0.35
Coil current [A]
Coil current [A]
Ball position [m]
1
0.95
0.9
0.85
0.3
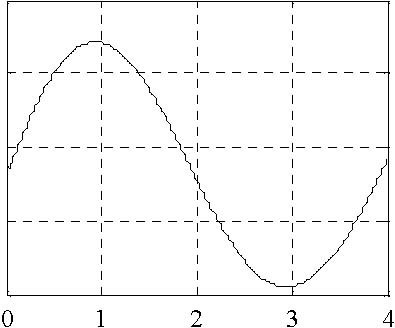
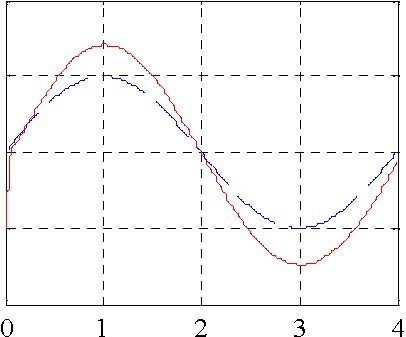
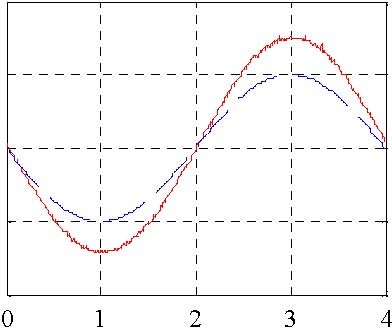
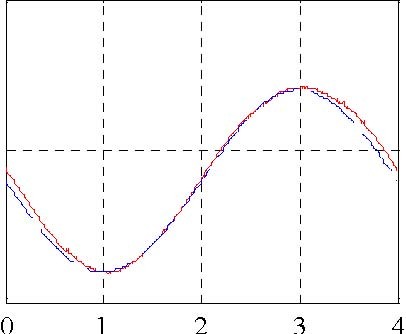
Time [s] Fig. 43. PID simulation – the desired position is in a sine wave form.
-3
x 10
11
0.15
Ball velocity [m/s]
0.1
0.05
0
10
9
8
7
-0.05
Time [s]
1.5
0.8
Control -PWM duty
0.6
0.4
0.2
1
0.5
0
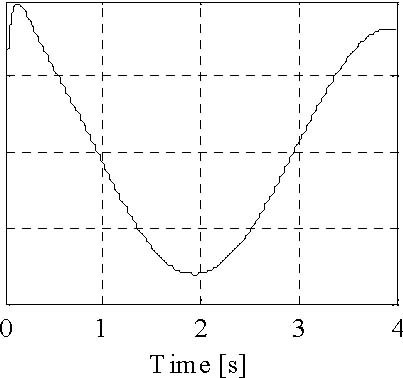
0 Time [s] Fig. 44. PID simulation – the desired position is in a square wave form.
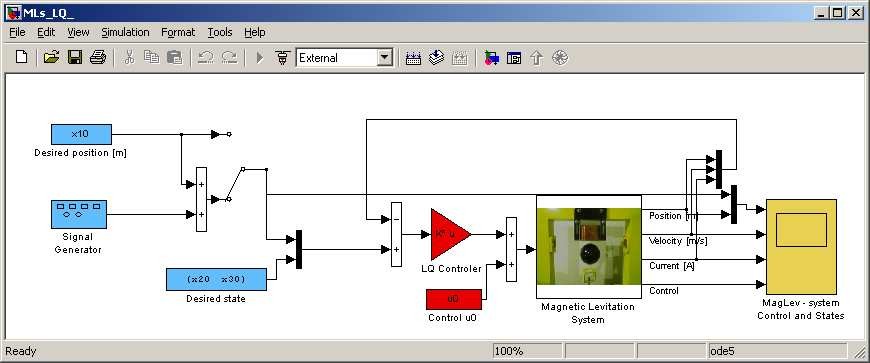
2.3.3 LQ
If you click the LQ button the following windows open (see Fig. 45).

The continuous LQ regulator is depicted on the basis of ml_model4lq.mdl (see Fig. 46). The user can use two files
- ML_calc_steady_state.m
- ML_calc_lq.m
The first one calculates the equilibrium point of the system. The second one calculates the LQ controller parameters using linmod and lqr. linmod obtains linear models from systems of ordinary differential equations. In theML_calc_lq.m file we encounter the following command:
[A, B, C, D] = linmod( ml_model4lq );
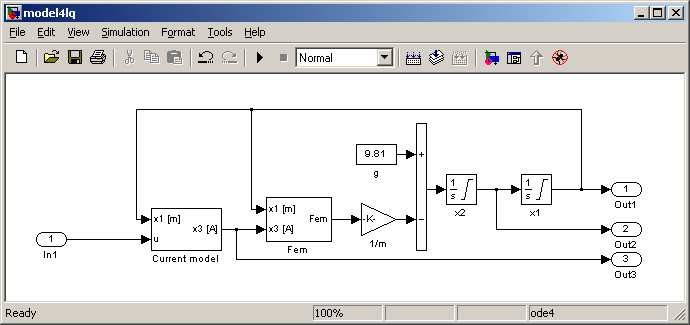
The state-space linear model of the system of ordinary differential equations described in the block diagram model4lq is returned in the form of the A, B, C, D matrices. The state variables and inputs are set to the defaults specified in the block diagram. Having obtained the linear model calculated at x10, x20, x30 equilibrium point for the assumed value u0 of
the control we are ready to calculate the K gains of the LQ controller. We only need to assume the Q and R matrices. From the ML_calc_lq.m file we have
Q=eye(3,3); Q(1,1)= 300; Q(2,2)= 0.001; Q(3,3) = 10; R=10.5;
The following assumptions corresponding to the Q and R weighting matrices have to be satisfied:
Q ≥ 0 R > 0
The following command from the ML_calc_lq.m file:
[K,S,E] = lqr(A,B,Q,R) calculates the optimal gain matrix K such that the state-feedback law u= −Kx minimizes the cost function — (x′Qx + u′Ru )dt subject to the state dynamics dx = Ax + Bu .
dt
Now, the gain vector K can be used as the optimal feedback (see the Simulink diagram in Fig. 45). We start the LQ simulation for a constant desired value and for the desired position assumed in a sine wave form. We obtain the results shown in Fig. 47 and Fig. 48.
-3
x 10
| 9.5 | 0.03 |
|---|---|
| 9Ball position [m] | 0.01 0.02 Ball velocity [m/s] |
| 8.5 | 0 |
| -0.01 |
0 0.5 1 1.5 00.5 1 1.5 Time [s] Time [s]
1 0.4
Coil current [A]
Control -PWM duty
0.3
0.2
0.1 0.9
0.8
0.7
0
00.5 1 1.5 2 Time [s] Time [s]
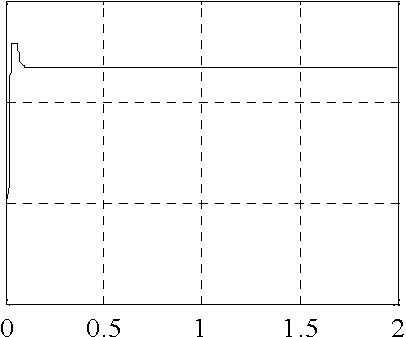
Fig. 47. LQ simulation – the desired position is a constant
-3
x 10
0.04
11
10
Ball velocity [m/s]
0.02
0
Coil current [A] Coil current [A]
Ball position [m] Ball position [m]
9
8
-0.02
7
Time [s]
Time [s]
1.1
0.8
Control -PWM duty
0.6
0.4
0.2
1
0.9
0.8
0.7
0 01234 01234 Time [s] Time [s]
Fig. 48. LQ simulation – the desired position is in a sine wave form
-3
x 10 11
0.15
Ball velocity [m/s]
0.1
0.05
0
10
9
8
7
-0.05 Time [s] Time [s]
1.5
0.8
Control -PWM duty
0.6
0.4
0.2
1
0.5
0
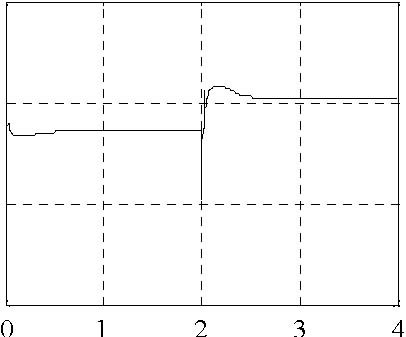
0 Time [s] Time [s] Fig. 49. LQ simulation – the desired position is in a square wave form
MLS User’s Manual -33
Similarly, we perform the LQ simulation for the desired position assumed in a square wave form. The simulation results are consequently shown in Fig. 49.
Remember that the obtained results are correct as long as the control and Û state variables do not saturate. Otherwise, the control algorithm has nothing to do with the LQ policy.
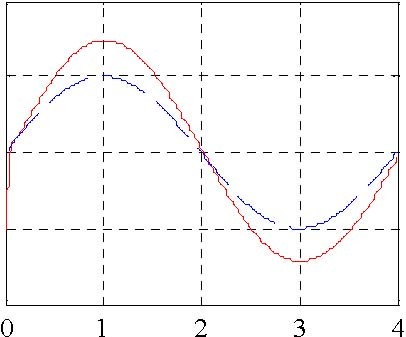
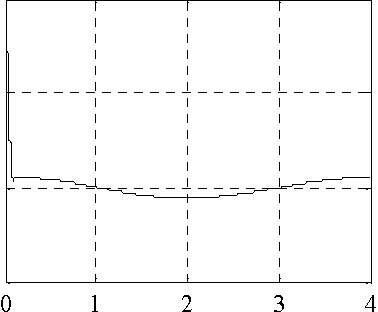
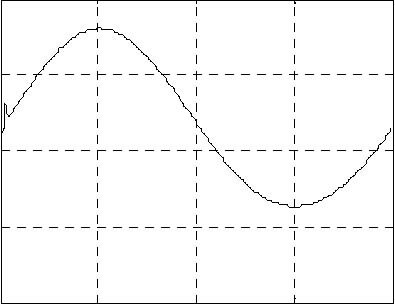
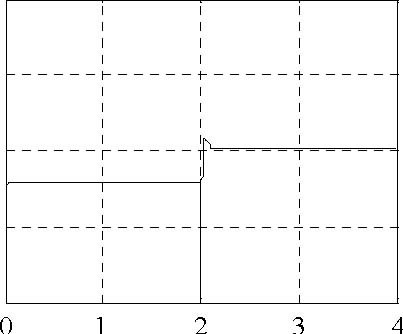
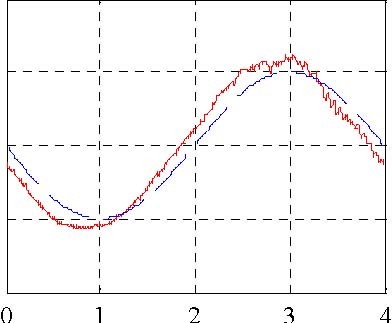
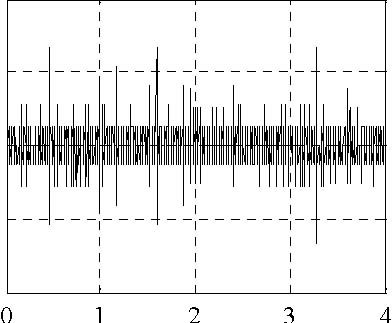
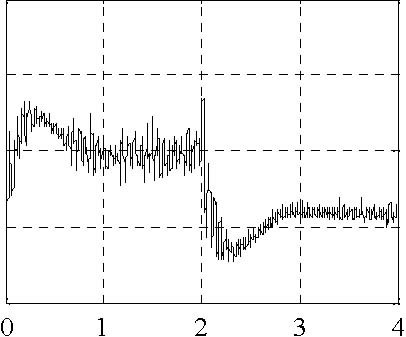
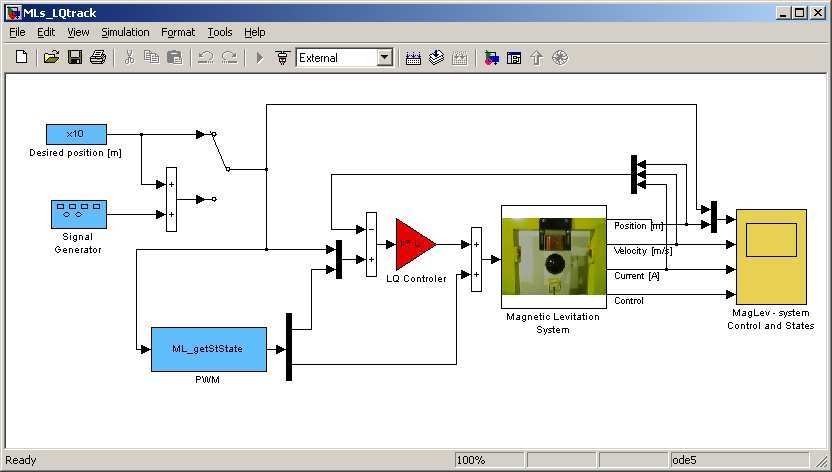
2.3.4 LQ tracking
If you click the LQ tracking button the following windows open (see Fig. 50). We do remember that the LQ control policy has been calculated for a given equilibrium point. To improve the LQ control action we introduce the LQ tracking policy. For each new value of the ball position the ball velocity, coil current values and the control are recalculated on the basis of nonlinear dynamical equations of ML (the ML_GetStState s-function is used). In fact we should introduce a no-stationary LQ – it means solve the Riccati equation for every new equilibrium point to obtain a new value of the gain vector K.
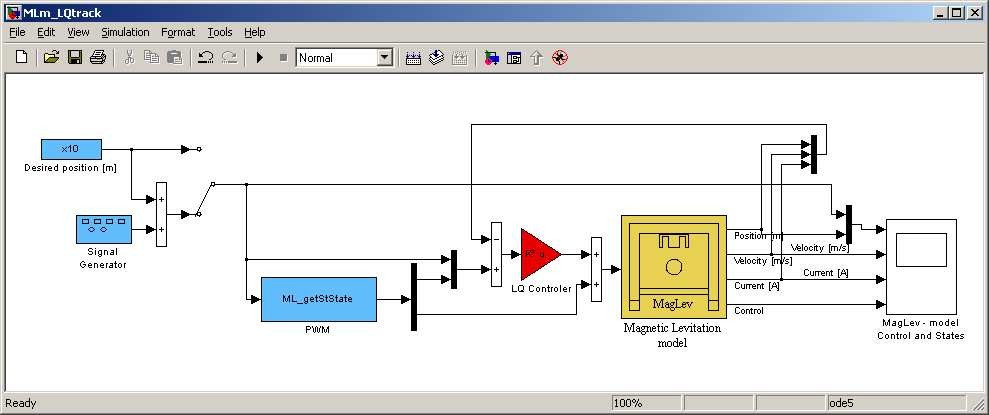
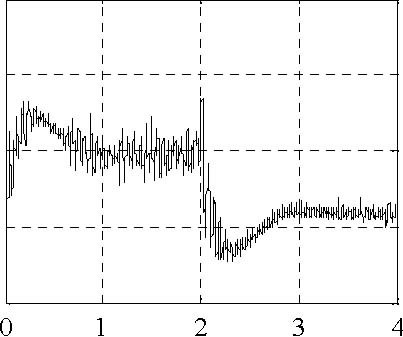
Now, the gain vector K can be used as the optimal feedback (see the Simulink diagram in Fig. 50). We start the LQ tracking simulation for a constant desired value and for the desired position assumed in sine and square wave forms. We obtain the results shown in Fig. 51, Fig. 52 and Fig. 53.
-3
x 10
9.5
0.03
0.02
Ball velocity [m/s]
0.01
0 -0.01
Coil current [A]
Coil current [A] Ball position [m]
Ball position [m]
9
8.5
00.5 1 1.5 2 Time [s] Time [s]
1 0.4
Control -PWM duty
0.3
0.2
0.1 0.9
0.8
0.7
0
0 0.5 1 1.5 2 00.5 1 1.5 2 Time [s] Time [s]
Fig. 51. LQ tracking simulation – the desired position is a constant
-3
x 10 11
0.03
Ball velocity [m/s]
Control -PWM duty
10
9
8
0.02
0.01
0
7
-0.01 Time [s] Time [s]
1.1
0.8

1
0.9
0.8 0.6
0.4
0.2
0.7
0
Time [s]
Time [s]
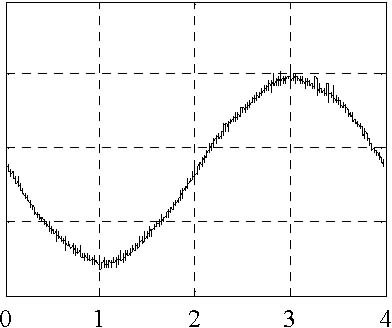
Fig. 52. LQ tracking simulation – the desired position is in a sine wave form.
-3
x 10
11
0.15
10
0.1
Coil current [A]
Ball position [m]
Ball velocity [m/s]
0.05
0
9
8
7
-0.05 Time [s] Time [s]
1.5
0.8
Control -PWM duty
0.6
0.4
0.2
1
0.5
0
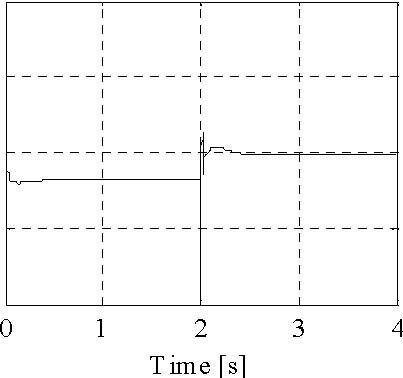
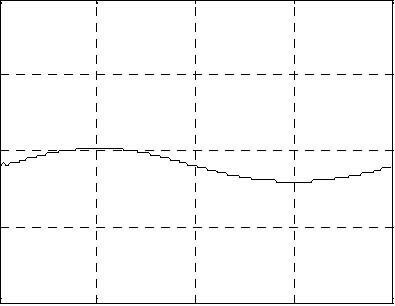
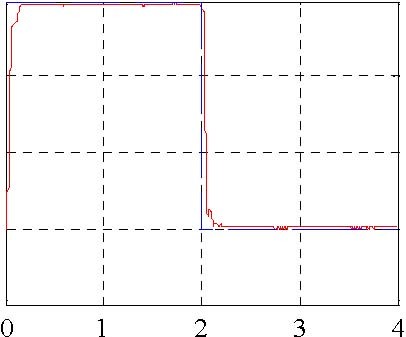
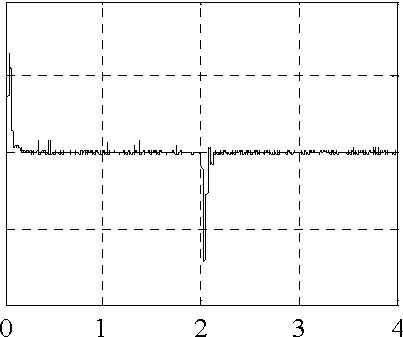
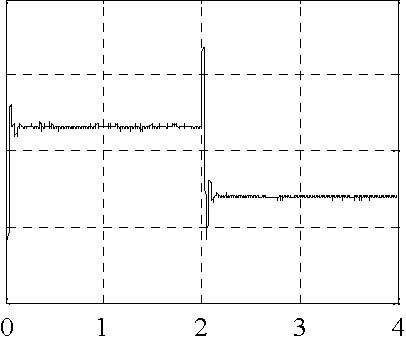
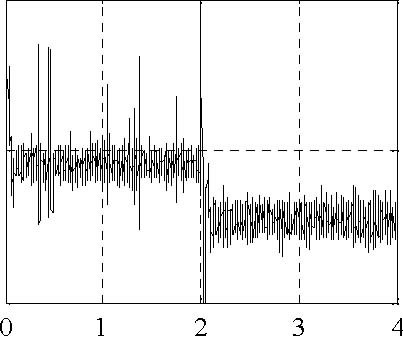
0 Time [s] Time [s] Fig. 53. LQ tracking simulation – the desired position is in a square wave form.
2.4 Levitation
All simulation experiments can be repeated as real-time experiments. In this way one can verify accuracy of modelling. If we double click the levitation button in the ML Main window the following window opens (see Fig. 54).

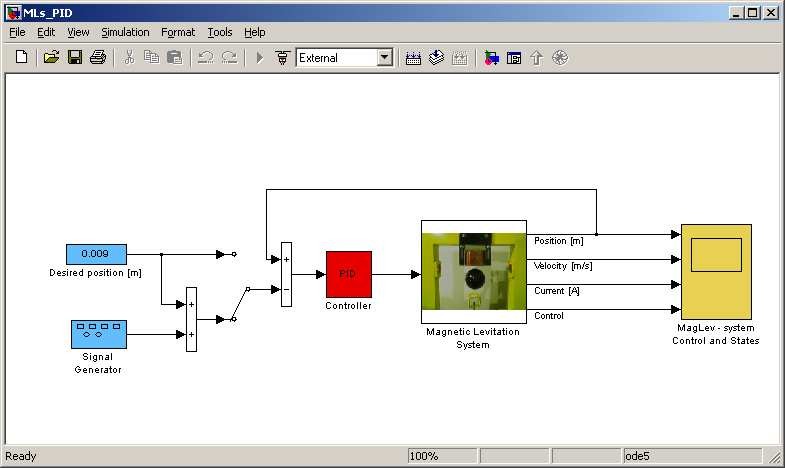
2.4.1 PID
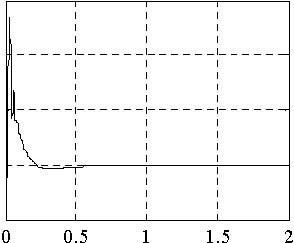
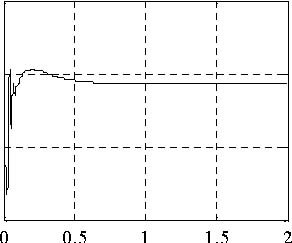
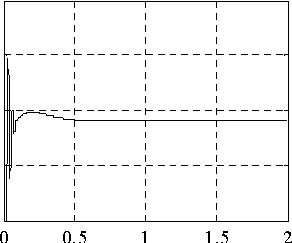
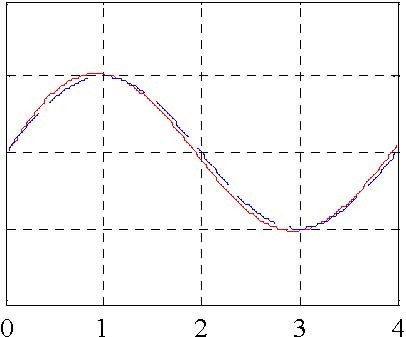
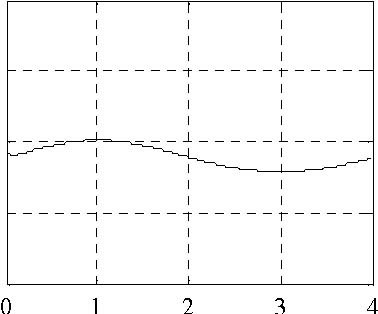
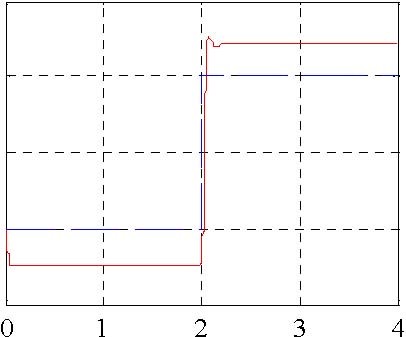
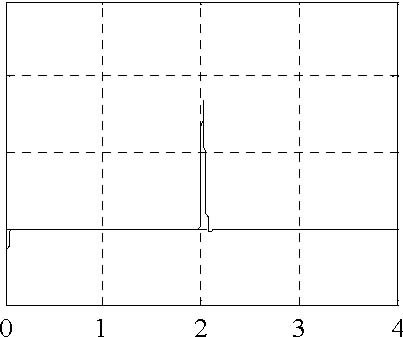
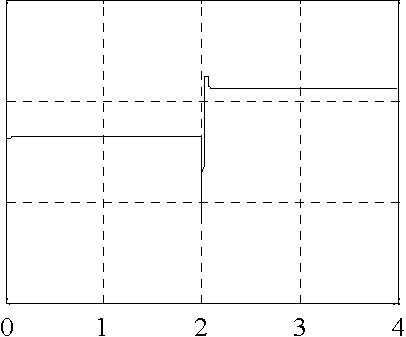
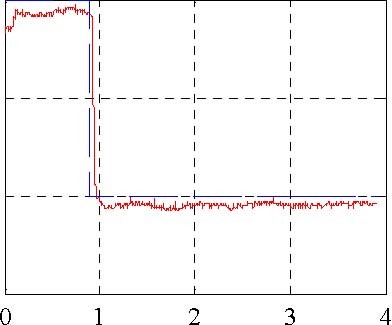
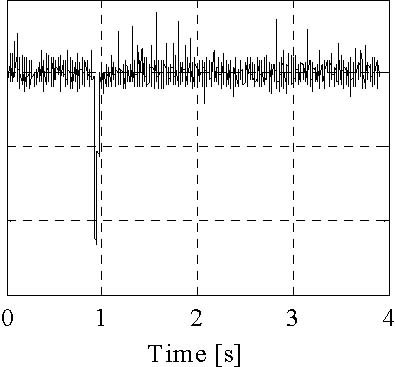
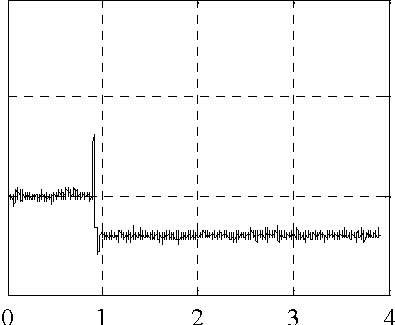
Double click the PID button. The real-time PID controller opens (see Fig. 55). The results of the real-time experiment are shown in: Fig. 56, Fig. 57 and Fig. 58.
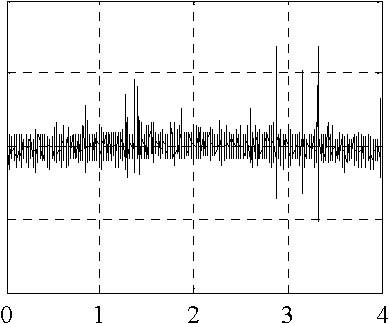
-3
x 10
11
0.1
0.05
Ball velocity [m/s]
0
-0.05
Coil current [A] Coil current [A]
Ball position [m] Ball position [m]
10
9
8
-0.1 Time [s] Time [s]
1.4
1
Control -PWM duty
0.5 1.2
1
0.8
0 01234 01234 Time [s] Time [s]
Fig. 56. PID real-time experiment. The desired position as a constant.
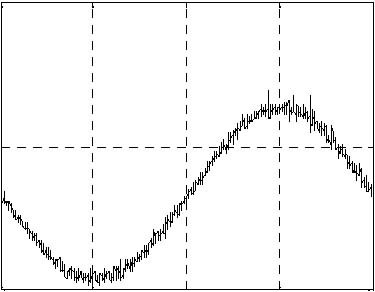
-3
x 10 11
0.1
Ball velocity [m/s]
0.05
0
-0.05
10
9
8
7
-0.1 Time [s] Time [s]
1.2
1
Control -PWM duty
0.5
1 00.8
01234 Time [s] Time [s]
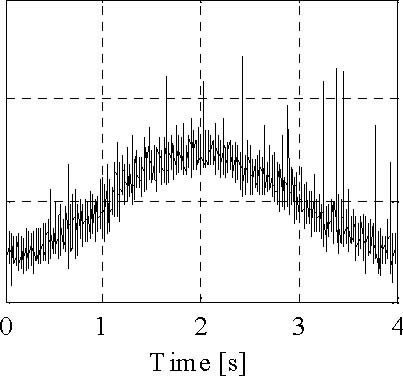
Fig. 57. PID real-time experiment. The desired position in a sine wave form.
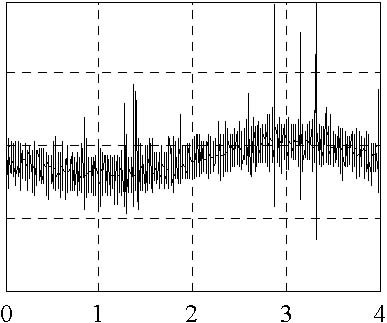
-3
x 10
12
0.3
0.2
Coil current [A]
Ball position [m]
Ball velocity [m/s]
Coil current [A]
10
8
0.1
0
6
-0.1 Time [s] Time [s]
1.4
1.4
1.2
1
0.8 1.2
1
0.8
0.6
0.6
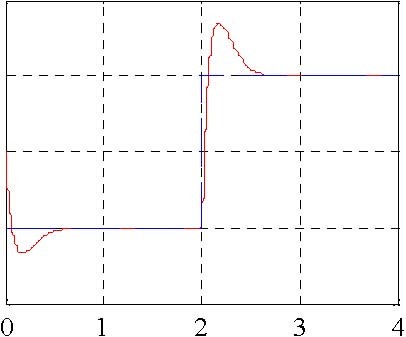
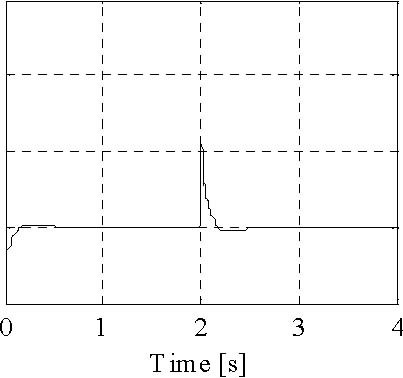
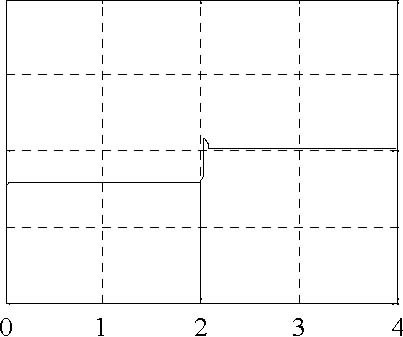
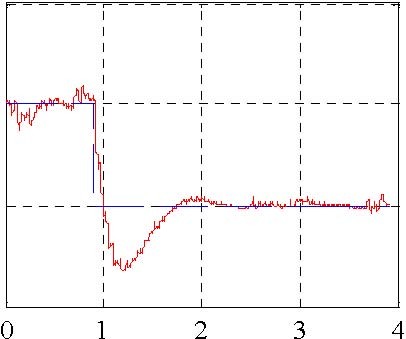
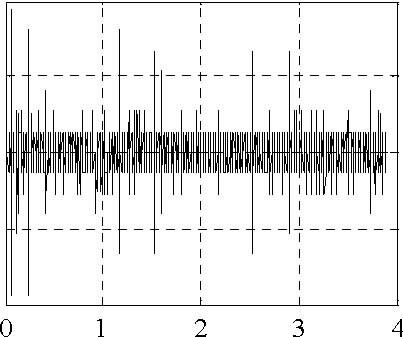
Time [s] Time [s] Fig. 58. PID real-time experiment. The desired position in a square wave form.
2.4.2 LQ
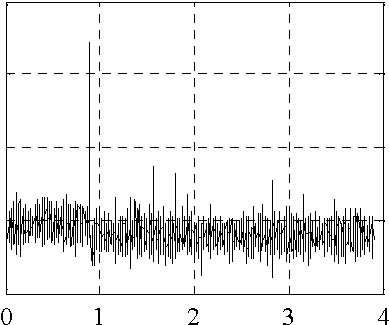
Double click the LQ button. The real-time LQ controller opens (see Fig. 59). The results of the real-time experiment are shown in: Fig. 60, Fig. 61 and Fig. 62.
-3
x 10
11
0.1
0.05
Ball velocity [m/s]
0
-0.05
Coil current [A]
Ball position [m] Coil current [A] Ball position [m]
10
9
8
-0.1 Time [s] Time [s]
1.4
0.8
Control -PWM duty
0.6
0.4
0.2 1.2
1
0.8
0.6
0 01234 01234 Time [s] Time [s]
Fig. 60. LQ real-time experiment. The desired position as a constant.
-3
x 10 11
0.1
Ball velocity [m/s]
0.05
0
-0.05
10
9
8
-0.1 Time [s] Time [s] 7
1.2
0.8
Control -PWM duty
0.6
0.4
0.2
1
0.8
0
01234 Time [s] Time [s]
Fig. 61. LQ real-time experiment. The desired position in a sine wave form.
-3
x 10
12
0.2
0.1
Coil current [A] Ball position [m]
Ball velocity [m/s]
Control -PWM duty
10
8
0
-0.1
6
-0.2
Time [s]
1
1.5
1
0.5 0.5
0 Time [s] Fig. 62. LQ real-time experiment. The desired position in a square wave form.
0
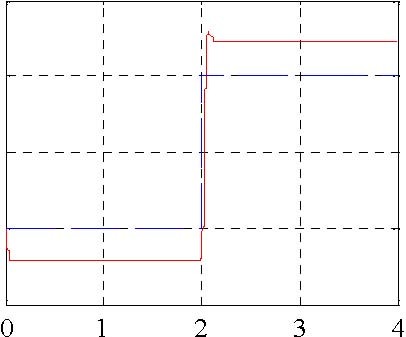
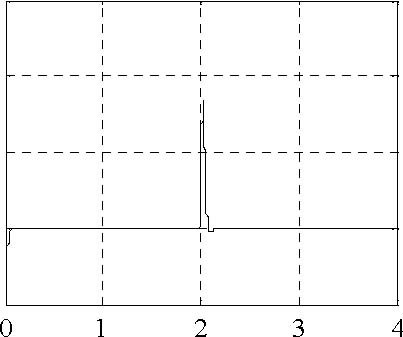
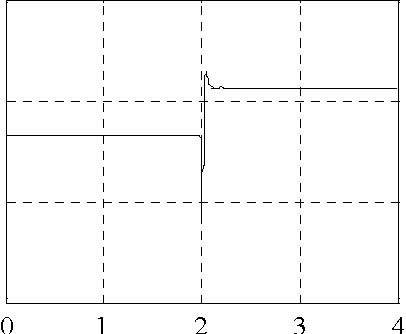
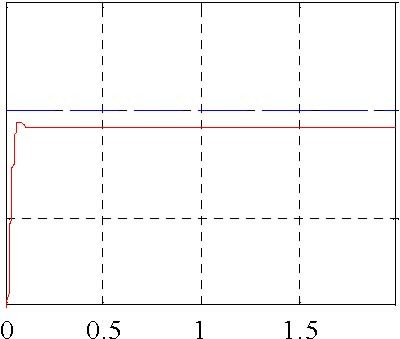
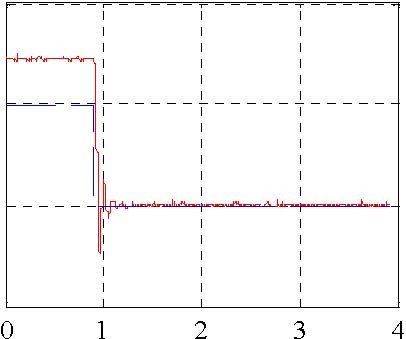
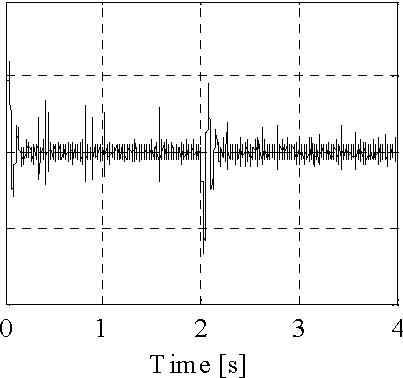
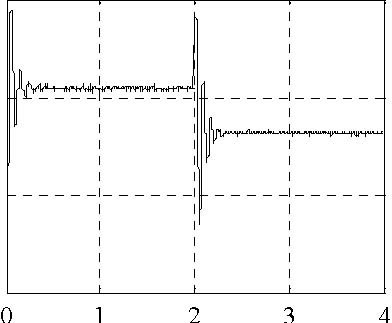
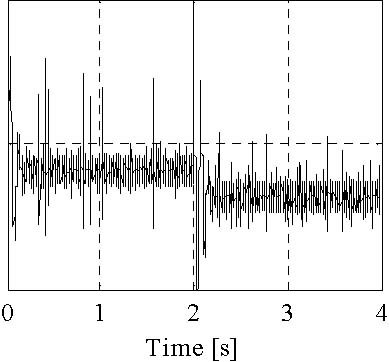
2.4.3 LQ tracking
Double click the LQ tracking button. The real-time LQ tracking controller opens (see Fig. 63). The results of the real-time experiment are shown in Fig. 64, Fig. 65 and Fig. 66.
-3
x 10
10
0.01
0
Ball velocity [m/s]
-0.01
-0.02
Coil current [A] Ball position [m]
9.5
9
8.5
-0.03
Time [s]
1
1.4
Control -PWM duty
0.8
0.6
0.4
0.2 1.2
1
0.8
Time [s] Time [s] Fig. 64. LQ tracking real-time experiment. The desired position as a constant.
0.015
0.02
Ball velocity [m/s]
0.01
0
Ball position [m]
0.01
0.005
-0.01
Time [s]
0.8
1.4
Control -PWM duty
0.6
0.4
0.2
Coil current [A]
1.2
1
0.8
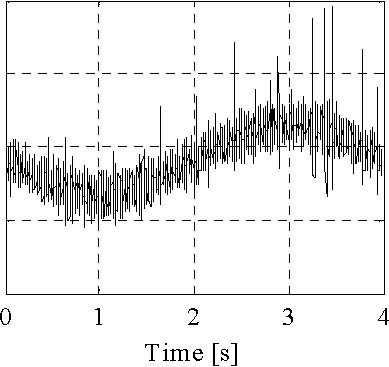
0 Time [s] Fig. 65. LQ tracking real-time experiment. The desired position in a sine wave form.
0.6
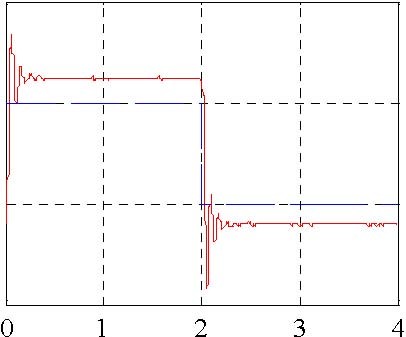
-3
x 10
12
0.2
10
0.1
Coil current [A]
Ball position [m]
Ball velocity [m/s]
Control -PWM duty
8
6
0
-0.1
4
-0.2 Time [s] Time [s]
2 1
1.5
1
0.5 0.5
0
0 Time [s] Time [s] Fig. 66. LQ tracking real-time experiment. The desired position in a square wave form.
3 Description of the Magnetic Levitation class properties
The MagLev is a MATLAB class, which gives the access to all the features of the RT-DAC4/PCI board supported with the logic for the MLS model. The RT-DAC4/PCI board is an interface between the control software executed by a PC computer and the power-interface electronic of the modular servo model. The logic on the board contains the following blocks:
- PWM generation block – generates the Pulse-Width Modulation output signal. Simultaneously the direction signal and the brake signal are generated to control the power interface module. The PWM prescaler determines the frequency of the PWM wave;
- power interface thermal status –the thermal status can be used to disable the operation of the overheated actuator unit;
- interface to the on-board analog-to-digital converter. The A/D converter is applied to measure the position of the ball (light sensor) and to measure the coil current of the actuator.
All the parameters and measured variables from the RT-DAC4/PCI board are accessible by appropriate properties of the MagLev class. In the MATLAB environment the object of the MagLev class is created by the command: object_name = MagLev;
for example ml = maglev;
The get method is called to read a value of the property of the object: property_value = get( object_name, ‘property_name’ ); The set method is called to set new value of the given property:set( object_name, ‘property_name’, new_property_value );
The display method is applied to display the property values when the object_name is entered in the MATLAB command window.
This section describes all the properties of the MagLev class. The description consists of the following fields:
| Purpose | Provides short description of the property |
| Synopsis | Shows the format of the method calls |
| Description | Describes what the property does and the restrictions subjected to the property |
| Arguments | Describes arguments of the set method |
| See | Refers to other related properties |
| Examples | Provides examples how the property can be used |
3.1 BaseAddress
Purpose: Read the base address of the RT-DAC4/PCI board.
Synopsis: BaseAddress = get( ml, ‘BaseAddress’ );
Description: The base address of RT-DAC4/PCI board is determined by computer. Each CML object has to know the base address of the board. When a CML object is created the base address is detected automatically. The detection procedure detects the base address of the first RT-DAC4/PCI board plugged into the PCI slots.
Example: Create the MagLev object:
ml = MagLev;
Display their properties by typing the command:
ml
| Type: | InTeCo ML object | |
|---|---|---|
| BaseAddress: | 54272 / D400 Hex | |
| Bitstream ver.: | x901 | |
| Input voltage: | [ 0.8451 | 0.0244 ][V] |
| PWM: | [ 0 ] | |
| PWM Prescaler: | [ 0 ] | |
| Thermal status: | [ 0 ] | |
| Time: | 0.00 [sec] | |
| Read the base address: | ||
BA = get( ml, ‘BaseAddress’ );
3.2 BitstreamVersion
Purpose: Read the version of the logic stored in the RT-DAC4/PCI board.
Synopsis: Version = get( ml, ‘BitstreamVersion’ );
Description: The property determines the version of the logic design of the RT-DAC4/PCI board. The magnetic levitation models may vary and the detection of the logic design version makes it possible to check if the logic design is compatible with the physical model.
3.3 PWM
Purpose: Set the duty cycle of the PWM wave.
Synopsis: PWM = get( ml, ‘PWM’ ); set(ml, ‘PWM’, NewPWM );
Description: The property determines the duty cycle and direction of the PWM wave. The PWM wave is used to control the electromagnet so in fact this property is responsible for the electromagnet control signal. TheNewPWM variable is a scalars in the range from 0 to 1. The value of +1 means the maximum control, 0.0 means zero control.
See: PWMPrescaler
Example: set( ml, ‘PWM’, [ 0.5 ] );
3.4 PWMPrescaler
Purpose: Determine the frequency of the PWM wave.
Synopsis: Prescaler = get( ml, ‘PWMPrescaler’ ); set( ml, ‘PWMPrescaler’, NewPrescaler );
Description: The prescaler value can vary from 0 to 16. The 0 value generates the maximal PWM frequency. The value 16 generates the minimal frequency. The frequency of the generated PWM wave is given by the formula:
PWMfrequency = 40MHz / 4095* (Prescaler+1)
See: PWM
3.5 Stop
Purpose: Sets the control signal to zero.
Synopsis: set( ml, ‘Stop’ );
Description: This property can be called only by the set method. It sets the zero control of the electromagnet and is equivalent to the set(ml, ‘PWM’, 0) call.
See: PWM
3.6 Voltage
Purpose: Read two voltage values.
Synopsis: Volt = get( ml, ‘Voltage’ );
Description: Returns the voltage of two analog inputs. Usually the analog inputs are applied to measure the ball position and the coil current.
3.7 ThermStatus
Purpose: Read thermal status flag of the power amplifier. Synopsis: ThermSt = get( ml, ‘ThermStatus’ ); Description: Returns the thermal flag of the power amplifier. When the temperature of a power amplifier is too high the flag is set to 1.
3.8 Time
Purpose: Return time information.
Synopsis: T = get( ml, ‘Time’ );
Description: The MagLev object contains the time counter. When a MagLev object is created the time counter is set to zero. Each reference to the Time property updates its value. The value is equal to the number of milliseconds which elapsed since the object was created.
3.9 Quick reference table
| Property name | Operation* | Description |
|---|---|---|
| BaseAddress | R | Read the base address of the RT-DAC4/PCI board |
| BitstreamVersion | R | Read the version of the logic design for the RT-DAC4/PCI board |
| PWM | R+S | Read/set the parameters of the PWM wave |
| PWMPrescaler | R+S | Read/set the frequency of the PWM wave |
| Stop | S | Set the control signal to zero |
| Voltage | R | Read the input voltages |
| ThermStatus | R | Read the thermal flags of the power amplifier |
| Time | R | Read time information |
• R – read-only property, S – allowed only set operation, R+S –property may be read and set
url: http://www.51lm.cn/p/templates/cn/show.php?cid=0&aid=3298
