|
|||
CAN_net_II_以太网接口_CAN卡
型号: PXF0341

Hardwarehandbuch
CAN@net II
Intelligentes PC/CAN-Interface

The expert for industrial and automotive communication
IXXAT
Hauptsitz Geschäftsbereich USA
IXXAT Automation GmbH IXXAT Inc. Leibnizstr. 15 120 Bedford Center Road D-88250 Weingarten USA-Bedford, NH 03110
Tel.: +49 (0)7 51 / 5 61 46-0 Phone: +1-603-471-0800 Fax: +49 (0)7 51 / 5 61 46-29 Fax: +1-603-471-0880 Internet: www.ixxat.de Internet: www.ixxat.com e-Mail: info@ixxat.de e-Mail: sales@ixxat.com
Support
Sollten Sie zu diesem, oder einem unserer anderen Produkte Support benötigen, wenden Sie sich bitte schriftlich an:
Fax: +49 (0)7 51 / 5 61 46-29 e-Mail: support@ixxat.de
Copyright
Die Vervielfältigung (Kopie, Druck, Mikrofilm oder in anderer Form) sowie die elektronische Verbreitung dieses Dokuments ist nur mit ausdrücklicher, schriftlicher Genehmigung von IXXAT Automation erlaubt. IXXAT Automation behält sich das Recht zur Änderung technischer Daten ohne vorherige Ankündigung vor. Es gelten die allgemeinen Geschäftsbedingungen sowie die Bestimmungen des Lizenzvertrags. Alle Rechte vorbehalten.
Handbuchnummer: 4.01.0086.10000 Version: 1.2
1 Einführung.................................................................................5
1.1 Übersicht.............................................................................5
1.2 Merkmale............................................................................5
1.3 Support...............................................................................6
1.4 Rücksendung von Hardware...............................................6 2 Installation.................................................................................7
2.1 Softwareinstallation ...........................................................7
2.2 Hardwareinstallation ..........................................................7 3 Anschlüsse und Anzeigen..........................................................8
3.1 Anschlussbelegung .............................................................8
3.1.1 Power-Stecker............................................................................ 8
3.1.2 Ethernet-Buchse ........................................................................ 9
3.1.3 CAN-Bus-Anschluss.................................................................. 10
3.2 Anzeigen ...........................................................................10
3.2.1 Power-LED (PWR) .................................................................... 11
3.2.2 Status-LED (CPU) ..................................................................... 11
3.2.3 Ethernet-LED (ETH) .................................................................. 12
3.2.4 Collision-LED (COL) .................................................................. 12
3.2.5 Link/Data Activity-LED (ACT)..................................................... 13
3.2.6 CAN LED (CAN)........................................................................ 13
3.3 CAN-Busabschluss.............................................................14 4 Konfiguration..........................................................................14
4.1 Konfigurationstool............................................................14
4.1.1 Übersicht.................................................................................14
4.1.2 Bedienung...............................................................................15
4.2 Zurücksetzen auf die Werkseinstellung ............................15 5 Anhang....................................................................................17
5.1 Technische Daten ..............................................................17
5.2 Werkeinstellung der Netzwerkparameter .........................18
5.3 Zubehör ............................................................................18
5.3.1 CAN-Busabschlusswiderstand .................................................. 18
5.4 Hinweise zur EMV .............................................................19
5.5 EG-Konformitätserklärung................................................20
5.6 FCC Compliance ................................................................21
3
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
1 Einführung
1.1 Übersicht
Mit dem IXXAT PC-CAN-Interface CAN@net II haben Sie eine hochwertige elektronische Komponente erworben, die nach neuesten technologischen Gesichtspunkten entwickelt und hergestellt worden ist.
Dieses Handbuch soll Ihnen helfen, Ihr CAN@net II Interface näher kennen zu lernen. Bitte lesen Sie dieses Handbuch, bevor Sie mit der Installation beginnen.
IXXAT bietet das CAN@net II in zwei Varianten an: Das CAN@net II/VCI ist ein über TCP/IP betriebenes PC-CAN-Interface. Es bietet über die IXXAT Standard-Windows-Treiberschnittstelle VCI eine komfortable und funktionell umfangreiche Schnittstelle für Windows Applikationen an. Über diese Standard-Treiberschnittstelle werden auch IXXAT Tools betrieben.
Das CAN@net II/Generic kann durch seine generische ASCII-Schnittstelle über TCP/IP mit nicht Windows-Systemen (z. B. Linux) verbunden werden. Durch die Verwendung von zwei CAN@net II/Generic Geräten kann darüber hinaus eine CAN-Ethernet-CAN bridge realisiert werden.
Die CAN@net II/Generic Geräte empfangen CAN-Nachrichten in ihrem CAN-Netzwerk und leiten diese Nachrichten über TCP/IP an das Partnergerät weiter. Dieses sendet die Nachrichten in das lokale CAN-Netzwerk. Bei der Konfiguration der Geräte können Filter gesetzt werden, so dass nur Botschaften ausgetauscht werden, die im jeweiligen Netzwerk von Interesse sind.
Für die jeweiligen CAN@net II Varianten sind spezifische Handbücher für die Softwareinstallation sowie die Programmierung und Integration der Geräte in eigene Applikationen verfügbar.
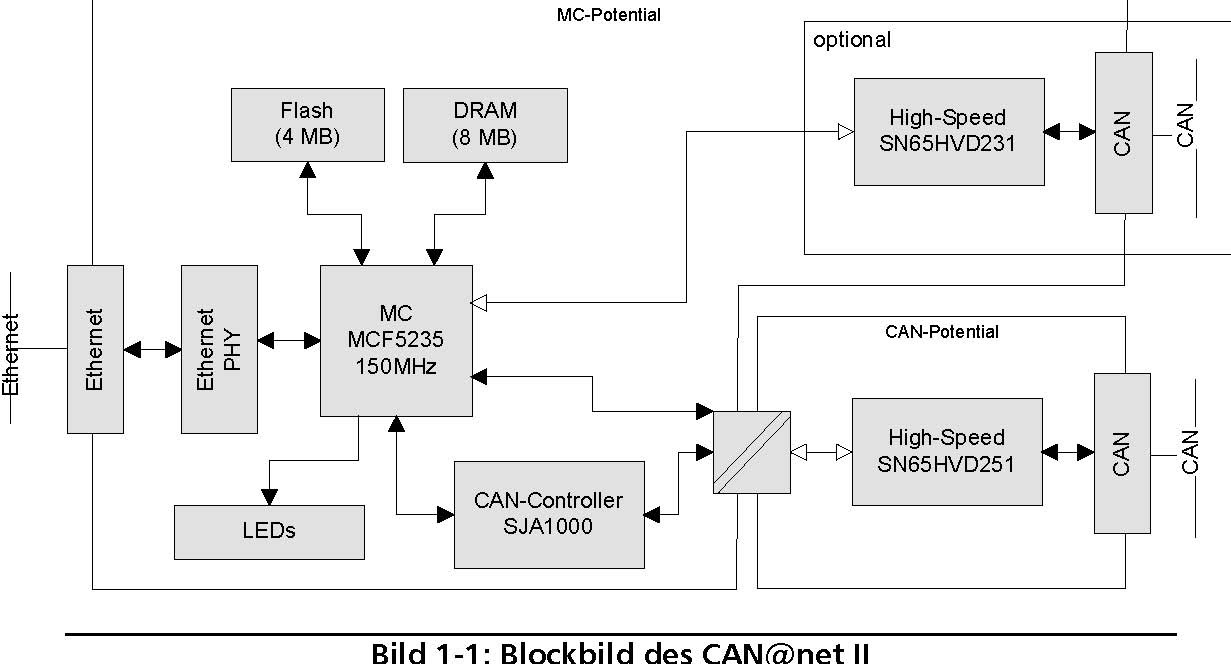
1.2 Merkmale
- Eingangsspannungsbereich +9 V ... +32 V DC
- Freescale 32 Bit Mikrocontroller mit 150MHz Takt
- 8 MByte DRAM
- 4 MByte Flash
- 1 CAN-Controller PHILIPS SJA1000 mit 16 MHz Takt
- CAN-Busankopplung nach ISO 11898-2, galvanisch entkoppelt
- Ethernet PHY mit Auto Crossover
- 10BASE-T/100BASE-TX Ethernet
5
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
1.3 Support
Weitergehende Informationen zu unseren Produkten, sowie FAQ-Listen und Tips zur Installation finden Sie im Supportbereich auf unserer Homepage (http://www.ixxat.de). Ebenso können Sie sich dort über aktuelle Produktversionen sowie verfügbare Updates informieren.
Sollten Sie nach dem Studium der Informationen auf unserer Homepage sowie der Handbücher weitere Fragen haben, wenden Sie sich bitte an unseren Support. Hierzu finden Sie im Supportbereich auf unserer Homepage entsprechende Formulare für die Supportanfrage. Um uns die Supportarbeit zu erleichtern und eine rasche Antwort zu ermöglichen, bitten wir Sie darauf zu achten exakte Angaben zu den jeweiligen Punkten zu machen und Ihre Frage bzw. Ihr Problem ausführlich zu beschreiben.
Wenn Sie unseren Support lieber per Telefon kontaktieren, dann bitten wir Sie ebenfalls vorab bereits eine entsprechende Supportanfrage über unsere Home-page zuzusenden, damit unserem Support die entsprechenden Informationen vorliegen.
1.4 Rücksendung von Hardware
Falls es erforderlich ist, dass Sie Hardware an uns zurücksenden, so bitten wir Sie das entsprechende RMA-Formular von unserer Homepage zu laden und entsprechend den Anweisungen auf diesem Formular zu verfahren.
Bei Reparaturen bitten wir Sie ebenfalls das Problem bzw. den Fehler ausführlich auf dem RMA-Formular zu beschreiben. Sie ermöglichen uns damit eine zügige Bearbeitung Ihrer Reparatur.
6
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
2 Installation
2.1 Softwareinstallation
Bei der Gerätevariante CAN@net II/VCI ist die Installation eines Treibers erforderlich. Dieser Treiber ist Bestandteil des VCI (Virtual CAN Interface), das Sie kostenlos im Internet unter http://www.ixxat.de herunterladen können.
Für die Installation des CAN-Treibers VCI unter Windows beachten Sie bitte das
VCI-Installationshandbuch. Für den Betrieb des CAN@net II/Generic als CAN-Ethernet-CAN Bridge müssen die CAN@net II/Generic Geräte konfiguriert werden. Für die Konfiguration der Geräte beachten Sie bitte das Handbuch CAN@net II/Generic.
2.2 Hardwareinstallation
Für den Betrieb des CAN@net II ist keine besondere Hardwareinstallation erforderlich. Lediglich eine Verbindung zu einer Spannungsquelle, zu Ethernet und zu CAN muss hergestellt werden.
Das CAN@net II/VCI kann während des Betriebs an das Ethernet-Netzwerk ange
schlossen oder von diesem getrennt werden. Vor dem ersten Betriebs des CAN@net II/VCI ist die Installation des VCI-Treibers erforderlich (siehe Abschnitt 2.1). Der VCI-Treiber installiert auch die benötigten Geräte-Treiber.
7
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
3 Anschlüsse und Anzeigen
3.1 Anschlussbelegung

Bild 3-1: Anschlüsse und Anzeigen des CAN@net II
3.1.1 Power-Stecker
Für den Anschluss des CAN@net II an eine Spannungsversorgung wird eine Schraubklemme eingesetzt. Bei der Verkabelung achten Sie bitte darauf, dass die Kabel einen ausreichenden Querschnitt (>0,14mm²) aufweisen.
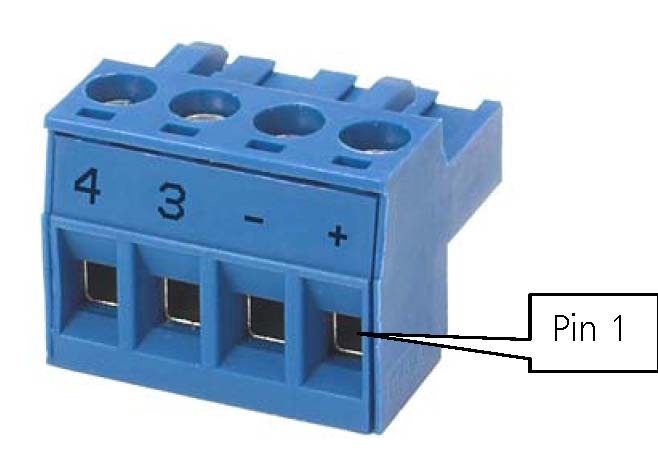
Bild 3-2: Power Stecker des CAN@net II
8
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
| Pin Nr. Stecker | Signal |
|---|---|
| 1 | V+ (+9 V bis +32 V DC) |
| 2 | V |
| 3 | Output 1 (optional) |
| 4 | Output 2(optional) |
Das Schraubklemmen-Modul ist aufgesteckt und kann mit Hilfe eines Schraubendrehers oder ähnlichem vom Gehäuse getrennt werden.
3.1.2 Ethernet-Buchse
Für den Anschluss des CAN@net II an Ethernet steht eine RJ45-Buchse zur Verfügung. Auf Grund des Auto Crossover Features des verwendeten Ethernet PHYs kann sowohl ein Crossover-Kabel als auch ein 1-zu-1-Netzwerkkabel eingesetzt werden.
| Pin Nr. RJ45 | Signal |
| 1 | TX + |
| 2 | TX |
| 3 | RX + |
| 4 | Mit Pin 5 verbunden |
| 5 | Mit Pin 4 verbunden |
| 6 | RX |
| 7 | Mit Pin 8 verbunden |
| 8 | Mit Pin 7 verbunden |
Der Schirm der Buchse ist über einen 1 nF Kondensator mit dem Massepotential der Platine gekoppelt.
9
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
3.1.3 CAN-Bus-Anschluss
Das CAN@net II verfügt über eine Busankopplung gemäß ISO 11898-2. Die Belegung des Sub-D9-Steckers ist in der Tabelle 3-3 ersichtlich.
| Pin Nr. Sub D9 | Signal |
| 1 | Nicht verbunden |
| 2 | CAN-Low |
| 3 | GND |
| 4 | Nicht verbunden |
| 5 | Nicht verbunden |
| 6 | Nicht verbunden |
| 7 | CAN-High |
| 8 | Nicht verbunden |
| 9 | Nicht verbunden |
Der Schirm der CAN-Buchse ist über einen 1 MΩ Widerstand und einen 1 nF
Kondensator mit der Masse der CAN-Ankopplung verbunden. Die höchste Störfestigkeit wird erreicht, wenn der Schirm des CAN-Kabels geerdet wird.
3.2 Anzeigen
Das CAN@net II verfügt über sechs LEDs. Diese LEDs dienen zur Anzeige des Kommunikationsstatus der zugehörigen Schnittstelle bzw. zur Anzeige des Gerätestatus.
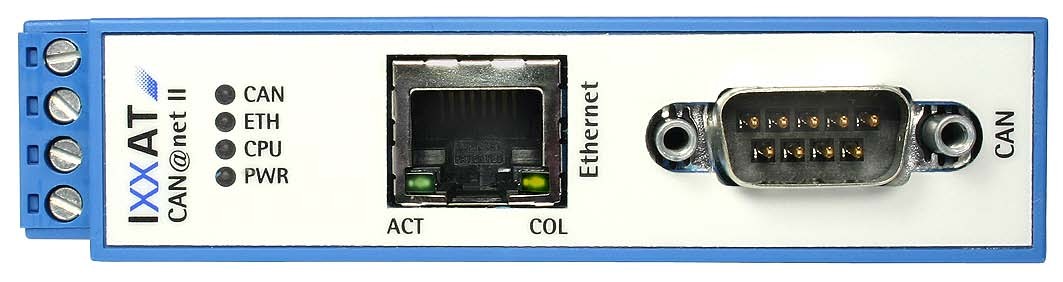
Bild 3-3: LEDs des CAN@net II
10
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
3.2.1 Power-LED (PWR)
Mit Hilfe der Power-LED wird die Betriebsbereitschaft des Gerätes signalisiert. Liegt die Versorgungsspannung am Gerät an, so leuchtet die Power-LED. Ist die Power-LED aus, ist ein Fehler in der Spannungsversorgung aufgetreten.
| Leuchtmuster | Beschreibung | Ursachen/Hinweise |
|---|---|---|
| aus | Keine Spannung vorhanden | • Sicherung defekt •Spannungsregelung defekt • Gerät nicht an Spannung angeschlossen |
| grün | Spannung vorhanden | • Gerät voll funktionsfähig |
3.2.2 Status-LED (CPU)
Mit Hilfe der zweifarbigen (grün und rot) Status-LED wird der Betriebszustand des Gerätes signalisiert.
| Leuchtmuster | Beschreibung | Ursachen/Hinweise |
|---|---|---|
| aus | Gerät nicht funktionsbereit | • Firmware läuft nicht an |
| gün blinkend (1 Hz) | Gerät funktionsbereit, Firmware gestartet | • Firmware signalisiert „normal“ Betrieb |
| grün blinkend (2 Hz) | Gerät befindet sich im Boot-manager | • Bootmanager des Gerätes aktiv• Keine Firmware vorhanden bzw. noch nicht gestartet |
| rot | Schreibzugriff(e) auf das Flash | • Firmware wird ins Flash geschrieben • Konfiguration wird ins Flash geschrieben |
| rot blinkend | Betriebsstörung | • Firmware zeigt eine Störung an |
11
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
3.2.3 Ethernet-LED (ETH)
Mit Hilfe der zweifarbigen (grün und rot) Ethernet-LED wird eine Kommunikation über Ethernet angezeigt. Mit jedem erfolgreich versendeten TCP/IP-Paket leuchtet die Ethernet-LED grün auf. Im Falle eines Sendefehlers leuchtet die LED rot auf.
Dies gilt nur für TCP/IP-Pakete, nicht für UDP-Pakete. UDP-Kommunikation wird nicht über diese LED angezeigt.
| Leuchtmuster | Beschreibung | Ursachen/Hinweise |
|---|---|---|
| aus | Keine Kommunikation über Ethernet | • Gerät nicht korrekt initialisiert • Gerät nicht an Ethernet angeschlossen • Keine Kommunikation vorhanden |
| grün / grün blinkend | Ethernet Paket(e) erfolgreich versendet | • Kommunikation vorhanden und OK |
| rot / rot blinkend | Ethernet Paket(e) konnte nicht versendet werden | • TCP/IP Verbindung nicht vorhanden, d.h. Kabel defekt oder keine Netzwerkverbindung mehr vorhanden |
3.2.4 Collision-LED (COL)
Mit Hilfe der gelben Collision-LED werden Kollisionen der Ethernet-Kommunikation angezeigt.
| Leuchtmuster | Beschreibung | Ursachen/Hinweise |
|---|---|---|
| aus | Keine Kollision | • Fehlerfreie/keine Ethernet-Kommunikation |
| gelb / gelb blinkend | Kollisionen detektiert | • Kollisionen in der Ethernet-Kommunikation festgestellt |
12
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
3.2.5 Link/Data Activity-LED (ACT)
Mit Hilfe der grünen Link/Data Activity-LED wird der Verbindungsstatus des Ethernet-Ports angezeigt.
| Leuchtmuster | Beschreibung | Ursachen/Hinweise |
|---|---|---|
| aus | Kein Link vorhanden | • Keine Verbindung zu einem Ethernet-Netzwerk • Defektes Netzwerkkabel |
| grün | Link vorhanden, jedoch keine Aktivität | • Korrekte Netzwerkverbindung vorhanden, allerdings momentan keine Kommunikation |
| grün blinkend | Ethernet-Kommunikation | • Es findet eine Ethernet-Kommunikation statt |
3.2.6 CAN LED (CAN)
Die zweifarbige (grün und rot) LED für CAN leuchtet bei jeder fehlerfrei empfan
genen oder gesendeten Nachricht grün auf. Befindet sich der CAN-Controller im Zustand „Error warning“ oder „Error passiv“, leuchtet die LED bei jeder CAN-Nachricht rot auf. Ist der CAN-Controller im Zustand „Bus off“, leuchtet die LED ununterbrochen rot.
| Leuchtmuster | Beschreibung | Ursachen/Hinweise |
|---|---|---|
| aus | Keine CAN Kommunikation | • Es ist keine CAN Kommunikation vorhanden • Gerät nicht mit CAN verbunden |
| grün / grün blinkend | CAN Kommunikation | • Mit jedem CAN Telegramm wird die LED eingeschaltet |
| rot blinkend | CAN Kommunikation, CAN-Controller aber im Error-Zustand | • Der CAN-Controller befindet sich im Zustand „Error Warning“ oder „Error passiv“, es werden aber noch CAN Telegramme empfangen |
| rot | Bus Off | • Der CAN-Controller befindet sich im Zustand „Bus Off“. Es ist keine CAN Kommunikation mehr möglich |
13
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
3.3 CAN-Busabschluss Auf dem CAN@net II ist kein Busabschlusswiderstand für den CAN-Bus bestückt.
Als Zubehör steht ein Busabschlusswiderstand in Form eines Durchführungssteckers bei IXXAT zur Verfügung (Bestellnummer 1.04.0075.03000).
4 Konfiguration
4.1 Konfigurationstool
4.1.1 Übersicht
Mit Hilfe des Konfigurationstools, welches bei der Installation des VCI-Treibers automatisch mit installiert wird, können die Netzwerkparameter des CAN@net II eingestellt werden.
Das Konfigurationstool durchsucht das Netzwerk, welches an den Rechner angeschlossen ist, nach verfügbaren CAN@net II Geräten. Alle gefundenen Geräte werden in der „Device List“ angezeigt und können dann separat eingerichtet werden.

Bild 4-1: Konfigurationstool
14
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
4.1.2 Bedienung
Beim Start des Konfigurationstools wird das Netzwerk nach CAN@net II Geräten durchsucht. Um ein nachträglich angeschlossenes Gerät zu erkennen, gibt es zwei Möglichkeiten:
- Aktivieren der Funktion „Autoscan“, somit wird der Suchvorgang alle drei Sekunden durchgeführt, oder
- mittels des „Rescan“-Schalters, hierbei wird ein Suchvorgang manuell gestar
tet. Um die Netzwerkparameter eines CAN@net II zu ändern, muss das gewünschte Gerät in der „Device List“ ausgewählt werden. Anschließend wird durch Betätigen des „Configure“-Schalters der Konfigurationsdialog für das Gerät geöffnet. Der Konfigurationsdialog kann aber nur geöffnet werden, sofern das Gerät nicht mit einer Applikation verbunden ist (Connection State: Not Connected).
Über den Konfigurationsdialog kann DHCP aktiviert bzw. deaktiviert werden. Ist der DCHP-Mode nicht aktiviert, können die IP Adresse, die Subnet Mask und das Gateway eingestellt werden. Des weiteren kann der Hostname und das Passwort eingestellt werden.
Durch „OK“ wird das zuvor ausgewählte CAN@net II mit den eingestellten Netzwerkparameter konfiguriert. Hierbei ist die Eingabe des Passwortes erforderlich. Über „Cancel“ kann die Konfiguration abgebrochen werden.
Die Werkseinstellungen der Netzwerkparameter sind im Anhang aufgeführt.
4.2 Zurücksetzen auf die Werkseinstellung
Mit Hilfe des DIP-Schalters kann die Netzwerkkonfiguration des CAN@net II wieder auf die Werkseinstellung zurückgesetzt werden. Hierzu sind folgende Arbeitsschritte notwendig:
- (1)
- Stellen Sie sicher, dass Sie elektrostatisch entladen sind.
- (2)
- Trennen Sie das CAN@net II von der Spannungsversorgung.
- (3)
- Trennen Sie das Gehäuseoberteil inkl. der Platine vom Gehäuseunterteil. Drücken Sie hierzu die beiden Verriegelungen an der Schmalseite des Gehäuses leicht ein.
- (4)
- Die Position 1 des DIP-Schalters auf „ON“ stellen.
- (5)
- Schieben Sie die Platine wieder in das Gehäuseunterteil. Achten Sie hierbei auf die ESD-Schutzfolie, diese muss unbedingt wieder mit eingebaut werden.
- (6)
- Schließen Sie das CAN@net II an die Spannungsversorgung an. Es muss ein Lauflicht (grün/rot abwechselnd) über die LEDs angezeigt werden.
- (7)
- Trennen Sie das CAN@net II von der Spannungsversorgung.
- (8)
- Entnehmen Sie die Platine wie zuvor aus dem Gehäuseunterteil.
15
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
- (9)
- Setzen Sie die Position 1 des DIP-Schalters auf „Off“.
- (10)
- Führen Sie das Gehäuseoberteil mit Platine und ESD-Folie in das Gehäuseunterteil ein. Achten Sie darauf, dass das Gehäuse wieder verriegelt.

Bild 4-2: Position des DIP-Schalters
| Schalter | Stellung | Signal |
|---|---|---|
| 1 | Off | Normaler Betrieb (Werkseinstellung) |
| On | Rücksetzen der Netzwerkparameter auf die Werkseinstellungen | |
| 2 | Off | Nicht genutzt (Werkseinstellung) |
| On | Nicht genutzt |
16
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
5 Anhang
5.1 Technische Daten
| Ethernet-Interface: | 10/100 MBit, Twisted-Pair |
| Mikrocontroller: | Freescale MCF5235, 150 MHz |
| RAM / Flash: | 8 MByte SDRAM / 4 MByte |
| CAN-Controller: | intern und 1x Philips SJA1000T |
| CAN Transceiver: | Texas Instruments SN65HVD251P |
| Max. Anzahl CAN-Bus Knoten: | 120 |
| CAN-Busabschlusswiderstand: | keiner |
| CAN-Durchlaufverzögerung: | bei galvanischer Trennung typisch 32 ns |
| CAN-Baudraten: | 10 kBaud – 1 MBaud |
| Max. CAN-Durchsatz (mit VCI, | 21000 Nachrichten/s (kontinuierlich) |
| Empfangsrichtung): | 21000 Nachrichten/s (Burst) |
| Max. CAN-Durchsatz (mit VCI, | 7200 Nachrichten/s (kontinuierlich) |
| Senderichtung): | |
| Spannungsversorgung: | +9 V ... +32 V DC |
Stromaufnahme Normalbetrieb: typisch 110 mA (bei 24 V) maximal 250 mA (bei 24 V)
Gehäusematerial: Polyamid Abmessungen: 114,5 x 99 x 22,5 mm Gewicht: ca. 300 g Schutzart: IP30
Arbeitstemperaturbereich: -20 °C -+70 °C Lagertemperaturbereich: -40 °C -+85 °C Relative Feuchte: 10 -95 %, keine Betauung Galvanische Trennung: 500 V AC für 1 min
EMV-Prüfung nach: DIN EN 55022:1998 + A1:2000 + A2:2003 (Grenzwerte Klasse A) FCC Rules 47 CFR Part 15 – Subpart B Alternative IEC/CISPR22:1997 + A1:2000
+ A2:2002 (Limit class A) Gerätesicherheit: CSA/UL 60950-00 Class 3862 10, 3862 90 Umweltrichtlinie: RoHS, WEEE, Directive (2002/95/EC)
17
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
5.2 Werkeinstellung der Netzwerkparameter
| Netzwerkparameter | Voreinstellung | Bemerkung |
| DHCP | Aktiv | |
| IP-Adresse | 169. 254. (BYTE)(Seriennr. – 800000)/254). (BYTE)(Seriennr. – 800000)%254 + 1) | Entsprechend AIPA |
| Subnet Mask | 255.255.0.0 | |
| Gateway Adresse | 0.0.0.0 | |
| Host Name | CAN_at_net_II_ 4. Byte der MAC-Adresse als Hex-Wert_ 5. Byte der MAC-Adresse als Hex-Wert | |
| Passwort | IXXAT | MD5Verschlüsselte Übertragung |
5.3 Zubehör
5.3.1 CAN-Busabschlusswiderstand
Als Zubehör steht ein Busabschlusswiderstand in Form eines Durchführungssteckers bei IXXAT zur Verfügung (Bestellnummer 1.04.0075.03000).
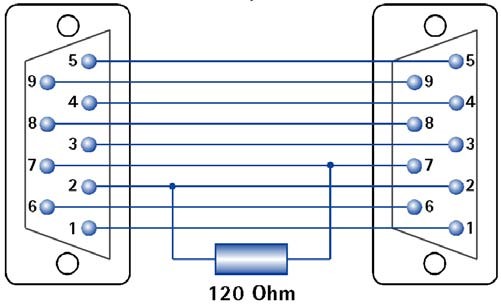
Bild 5-1: Verbindungen des CAN Busabschlusswiderstandes
18
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2

Bild 5-2: CAN-Busabschlusswiderstand
5.4 Hinweise zur EMV
Das PC/CAN-Interface CAN@net II darf nur zusammen mit einem PC verwendet werden, der über ein CE-Zeichen verfügt. Der an das Interface angeschlossene CAN-Bus muss über eine geschirmte Leitung verfügen, das Schirmgeflecht ist flächig auf das Steckergehäuse aufzulegen.
19
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
5.5 EG-Konformitätserklärung
IXXAT Automation erklärt, dass das Produkt: CAN@net II/VCI und CAN@net II/Generic
| mit den Artikelnummern: | 1.01.0086.10200 |
| 1.01.0086.10201 | |
| 1.01.0086.90001 | |
| die Anforderungen der Normen: | DIN EN 55022:1998 + A1:2000 + A2:2003 |
| DIN EN 55024:1998 + A1:2001 + A2:2003 |
gemäß folgenden Prüfbericht erfüllt: IXB40_01.DOC
Das Produkt entspricht somit den EG-Richtlinien: 89/336/EWG
Diese Erklärung gilt für alle Exemplare, die das CE Zeichen tragen und verliert ihre Gültigkeit, wenn Veränderungen am Produkt vorgenommen werden.
01.12.05, Dipl.-Ing. Christian Schlegel , Geschäftsführer
IXXAT Automation GmbH Leibnizstrasse 15 88250 Weingarten
20
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
5.6 FCC Compliance
Declaration of conformity
This device complies with Part 15 of the FCC Rules. Operation is subject to the following two conditions:
- this device may not cause harmful interference, and
- this device must accept any interference received, including interference that may cause undesired operation.
Class A digital device instructions:
Note: This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference when the equipment is operated in a commercial environment. This equipment generates, uses, and can radiate radio frequency energy and, if not installed and used in accordance with the instruction manual, may cause harmful interference to radio communications. Operation of this equipment in a residential area is likely to cause harmful interference in which case the user will be required to correct the interference at his own expense.
21
Copyright IXXAT Automation GmbH CAN@net II -Handbuch, V1.2
url: http://www.51lm.cn/p/templates/cn/show.php?cid=905&aid=341
