|
|||
初级课程目录
型号: PXF3576
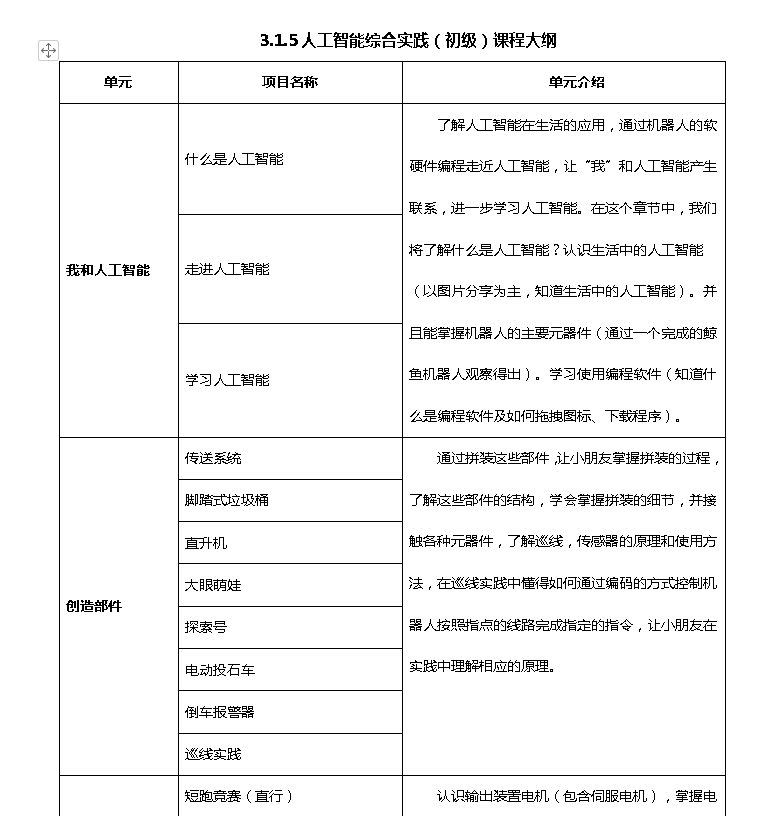
3.1.5人工智能综合实践(初级)课程大纲
|
单元 |
项目名称 |
单元介绍 |
|
我和人工智能 |
什么是人工智能 |
了解人工智能在生活的应用,通过机器人的软硬件编程走近人工智能,让“我”和人工智能产生联系,进一步学习人工智能。在这个章节中,我们将了解什么是人工智能?认识生活中的人工智能(以图片分享为主,知道生活中的人工智能)。并且能掌握机器人的主要元器件(通过一个完成的鲸鱼机器人观察得出)。学习使用编程软件(知道什么是编程软件及如何拖拽图标、下载程序)。 |
|
走进人工智能 |
||
|
学习人工智能 |
||
|
创造部件 |
传送系统 |
通过拼装这些部件,让小朋友掌握拼装的过程,了解这些部件的结构,学会掌握拼装的细节,并接触各种元器件,了解巡线,传感器的原理和使用方法,在巡线实践中懂得如何通过编码的方式控制机器人按照指点的线路完成指定的指令,让小朋友在实践中理解相应的原理。 |
|
脚踏式垃圾桶 |
||
|
直升机 |
||
|
大眼萌娃 |
||
|
探索号 |
||
|
电动投石车 |
||
|
倒车报警器 |
||
|
巡线实践 |
||
|
小小运动会 |
短跑竞赛(直行) |
认识输出装置电机(包含伺服电机),掌握电机的使用和编程方法,知道编程中功率/速度及时间对于电机转动的影响,学会控制机器人直行和转弯的方法。在本章节中搭建小车,感受不同功率和时间对小车的影响。探究转弯的原因(通过已给出的数值进行感知),总结直线和转弯的特点。在《拉拉队员》课程中将认识伺服电机,知道伺服电机和闭环电机的区别、学习伺服电机的编程方法、设计拉拉队员的走位及手部动作、通过编程给拉拉队员编排拉拉操。 |
|
弯道王者(转弯) |
||
|
折返跑 |
||
|
拉拉队员(上) |
||
|
拉拉队员(中) |
||
|
拉拉队员(下) |
||
|
我的AI宠物 |
设计我的AI宠物 |
通过对于学生比较熟悉的宠物进行切入,设计一个自己的AI宠物,熟悉情感屏、语音系统和声音等模块的应用。给自己的AI宠物设计一个外形,同时具备语音识别的功能、情感表达(开心,悲伤,难过等)功能、
智能避障功能,并且综合运用这些智能功能。在编程中,能够通过程序应用语音传感器,能根据我的指令完成动作,应用情感屏,让它表达自己的情绪,应用超声波传感器能够在家里自如移动。 |
|
它能理解我 |
||
|
它有自己的小情绪 |
||
|
它真活泼 |
||
|
我最棒的AI宠物 |
||
|
孤岛求生 |
请求救援(彩灯+蜂鸣器) |
通过“孤岛生存”的场景设置,引导学生设想在孤岛上可能发生的情况,并根据这些情况寻找适合的传感器制作完成一些工具帮助我们在孤岛更好的生存下来。本单元仅为传感器的使用,并不涉及传感器和电机复合的使用方式。
学生通过本章节的学习,可以掌握LED灯、光敏传感器、声音传感器、温湿度传感器、火焰传感器、超声波传感器的使用方法,并且通过编程软件编程,灵活运用这些传感器。 |
|
白天还是黑夜?(光敏) |
||
|
快听!那是什么?(声音) |
||
|
寻找水源(温湿度) |
||
|
寻找火种(火焰) |
||
|
小心前方障碍 (超声波) |
||
|
我是你的眼 |
抵达终点 |
本章节将深入探究在机器人领域最常用的灰度传感器,通过不同的任务了解到机器人“眼睛”的强大作用。在本章节的课程中学生将完成搭建和复杂的编程任务,在编程过程中掌握灰度传感器模块的使用方法,比如:学习如何使用单灰度完成任务、完成机器人在桌上永不掉落的任务、完成巡线巡逻机器人、单灰度巡线任务、单灰度沿墙走任务等。 |
|
兜兜转转 |
||
|
巡逻卫士1 |
||
|
巡逻卫士2 |
||
|
超级警卫 |
||
|
逃出密室 |
逃出密室1 |
通过“逃出密室”的组合任务,探究触碰传感器的使用方法,在单一情况判断的编程基础上,学习双重判断,分支嵌套的技巧。
综合利用已学习的光敏传感器知识、超声波传感器知识完成相关任务,接受高难度的逃离密室挑战。 |
|
逃出密室2 |
||
|
逃出密室3——单触碰 |
||
|
逃出密室4——双触碰 |
||
|
逃出终极密室 |
url: http://www.51lm.cn/p/templates/cn/show.php?cid=0&aid=3576
