|
|||
四旋翼飞行仿真器_
型号: PXF0448

|
|||||||||||||||
|

|
系统特点:
外形美观大方,开放式模块化结构设计
硬件平台基于PC和开放式DSP运动控制器
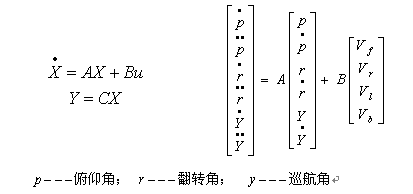
该系统是一个典型的多输入-多输出系统(MIMO)
系统模型:
系统的状态方程
 参考实验内容:
控制软件及其界面:
MATLAB实验软件
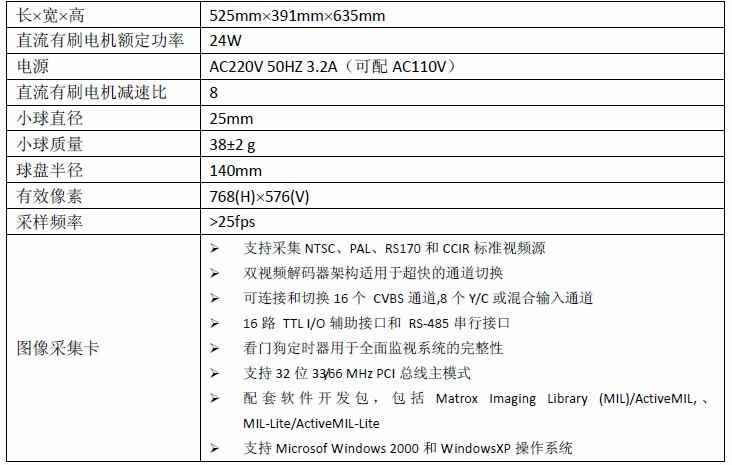 主要技术参数:
定购指南:
使用对象: 本实验系统适合本科生、研究生以及控制理论研究者进行控制理论如最优控制、鲁棒控制等理论验证和研究。 |
url: http://www.51lm.cn/p/templates/cn/show.php?cid=905&aid=448
