|
|||
塔式起重机控制系统
型号: PXF0061
塔式起重机控制系统——实现不摆动负载的轨迹运动
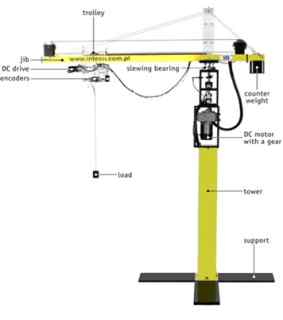
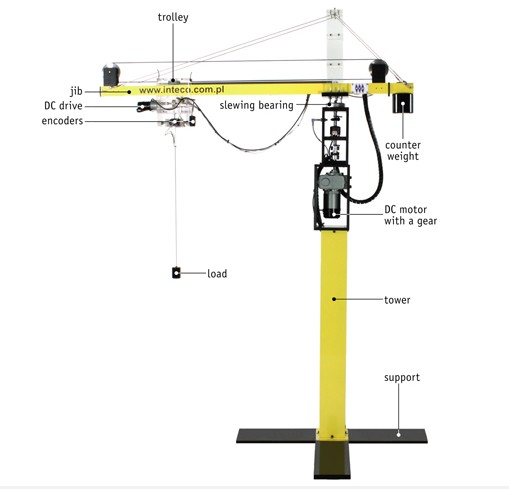
这个三维立体的塔式起重机实验模型是对应现代结构的塔式起重机设计的,有着最完美的高度和承载能力。该模型系统是一个高度非线性多入多出系统,配备了独特的2D角度测量传感器。
每个塔式起重机都包括一个前臂和一个平衡臂,两个都是安装在一个在回转支撑轴承位置上的转盘上。平衡臂携带了一个平衡重物,前臂通过一个电动滑块挂载起重物。在我们的模型上,转盘位于塔座的顶端——由特殊的塑料合金制成。
该系统是完全整合于Matlab/Simulink环境下的,并且可以实时运行一系列的预编程的控制实验。用户可以在此基础之上构建自己的新算法,快速原型进行实际控制算法是一件非常方便的事情。这里需要3个控制驱动和5个角位置传感器。第一个驱动是前臂的旋转,需要强大的驱动力,第二个驱动是电动滑块的来回往复运动,第三个驱动是释放负载。典型的控制目标就是控制负载按照规定的三维轨迹运动,同时控制负载在最小的范围内摆动。

硬件:
3个PWM控制的直流电机
电源接口
RT-DAC I/O 内置PCI板卡或者外置USB板卡(PWM控制和编码器逻辑储存在XILINX芯片中)
尺寸:
1200*1200*
url: http://www.51lm.cn/p/templates/cn/show.php?cid=38&aid=61
