|
|||
转速负反馈控制直流调速系统的仿真
型号: PXF0218

转速负反馈控制直流调速系统的仿真
转速负反馈闭环调速系统的仿真
1. 仿真模型的建立
进入MATLAB,并打开SIMULINK模块浏览器窗口,建立一个新的模型,并复制入相应模块,修改模块的参数,其中PI调节器的至暂定为,1/t = 11.43。最后对照着图一中的系统框图连接模块,所得模型如图二所示:
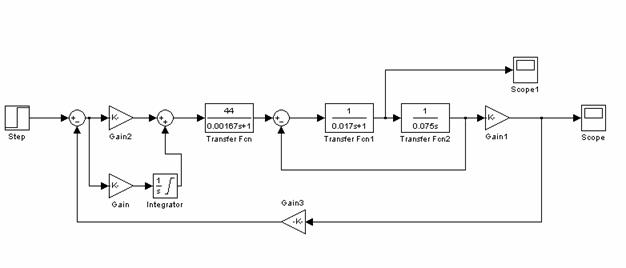
图二 比例积分控制的直流调速系统的仿真模型
2. 仿真模型的运行
启动仿真过程,得到的仿真结果如图三,图四所示:
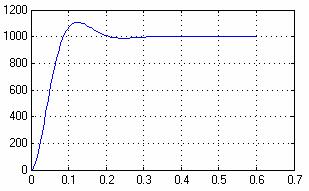
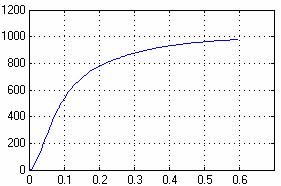
图三 scope输出结果
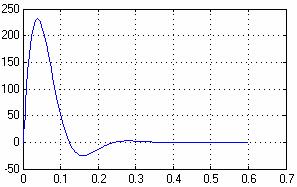
图四 scope1输出结果
其中,由图三scope输出结果中可以得出该控制系统的最大超调量Mp、上升时间![]() 、调整时间
、调整时间![]() ,取值分别为:
,取值分别为:
Mp = 108r/min, ![]() = 0.12s,
= 0.12s, ![]() = 0.28s(估计值)
= 0.28s(估计值)
3. PI调节器参数的调整
改变PI调节器的参数,并在启动仿真,分别从仿真曲线中得到的最大超调量及调整时间,相互间进行比较,如下表所示
|
比例系数 |
积分系数 |
最大超调量Mp(r/min) |
调整时间 |
|
0.25 |
3 |
0 |
>0.6 |
|
0.56 |
3 |
0 |
>0.6 |
|
0.56 |
11.43 |
108 |
0.28 |
|
0.8 |
11.43 |
63 |
0.28 |
|
0.8 |
15 |
152 |
0.23 |
由表中可以看出,改变PI调节器的参数,可以得到转速响应的超调量不一样、调节时间不一样的响应曲线。如图五、六所示分别为调节器参数为的系统转速响应曲线,系统转速的响应和 时系统的转速响应曲线。
时系统的转速响应曲线。
图五 参数为 的响应曲线,系统转速的响应无超调,但响应的调整时间很长。
 图六 参数 的响应曲线,系统转速的响应的超调很大,但调整时间短,快速性好。
图六 参数 的响应曲线,系统转速的响应的超调很大,但调整时间短,快速性好。
PID参数的整定就是合理的选择PID三参数。从系统的稳定性、响应速度,超调量和稳态精度等各方面考虑问题,三参数的作用如下:
1、比例参数![]() 的作用是加快系统的响应速度,提高系统的调节精度。随着
的作用是加快系统的响应速度,提高系统的调节精度。随着![]() 的增大系统的响应速度越快,系统的调节精度越高,但是系统易产生超调,系统的稳定性变差,甚至会导致系统不稳定。
的增大系统的响应速度越快,系统的调节精度越高,但是系统易产生超调,系统的稳定性变差,甚至会导致系统不稳定。![]() 取值过小,调节精度降低,响应速度变慢,调节时间加长,使系统的动静态性能变坏。
取值过小,调节精度降低,响应速度变慢,调节时间加长,使系统的动静态性能变坏。
2、积分作用参数![]() 的一个最主要作用是消除系统的稳态误差。
的一个最主要作用是消除系统的稳态误差。![]() 越大系统的稳态误差消除的越快,但
越大系统的稳态误差消除的越快,但![]() 也不能过大,否则在响应过程的初期会产生积分饱和现象。若
也不能过大,否则在响应过程的初期会产生积分饱和现象。若![]() 过小,系统的稳态误差将难以消除,影响系统的调节精度。
过小,系统的稳态误差将难以消除,影响系统的调节精度。
3、微分作用参数![]() 的作用是改善系统的动态性能,其主要作用是在响应过程中抑制偏差向任何方向的变化,对偏差变化进行提前预报。但
的作用是改善系统的动态性能,其主要作用是在响应过程中抑制偏差向任何方向的变化,对偏差变化进行提前预报。但![]() 不能过大,否则会使响应过程提前制动,延长调节时间,并且会降低系统的抗干扰性能。
不能过大,否则会使响应过程提前制动,延长调节时间,并且会降低系统的抗干扰性能。
总之,PID参数的整定必须考虑在不同时刻三个参数的作用以及相互之间的互联关系,该道理也符合PI调节器的参数整定。
在本仿真过程的参数调整中,在比例系数比较小为0.25或0.56时,虽然系统响应的无超调,但是速度就很慢;在比例系数变大,而积分系数也比较大时,系统出现超调,但调整速度变大;在两系数都比较大时,系统的调整速度虽然很快,但是超调量大,稳定性差。在工程中,需要根据要求调整PI调节器的参数,是系统响应满足需要。
总结
在这次仿真过程中,我参照了《电力拖动自动控制系统》课本中的例题,在理解的基础上做了少量的调整。转速负反馈控制直流调速系统运用的是一个单闭环的PI调节器,该调节器中的比例系数![]() 和积分系数
和积分系数![]() 其关键作用,它们影响着响应曲线的响应速度和稳定性等,通过PI调节器的调节可以得到振荡、有静差或无静差、超调大或启动快等不同要求的系统。当然,另外也有一些控制方法等,如经典的PID控制、模糊控制等,虽然它们的控制特点有差别,但都能使系统达到不同的要求。
其关键作用,它们影响着响应曲线的响应速度和稳定性等,通过PI调节器的调节可以得到振荡、有静差或无静差、超调大或启动快等不同要求的系统。当然,另外也有一些控制方法等,如经典的PID控制、模糊控制等,虽然它们的控制特点有差别,但都能使系统达到不同的要求。
免责声明/版权申明 Passiontech
所有文章为网上搜集或私下交流学习之用,任何涉及商业盈利目的均不得使用,否则产生的一切后果由您自己承担!
本站仅仅提供一个观摩学习的环境,将不对任何资源负法律责任。所有资源请在下载后24小时内删除。
若无意中侵犯到您的版权利益,请来信联系我们,我们会在收到信息三天内给予处理!
url: http://www.51lm.cn/p/templates/cn/show.php?cid=905&aid=218
