|
|||
自平衡小车_
型号: PXF0447

|
|||||||||||||||
|

|
系统特点
1.比台式倒立摆它有更多的运动自由度
2.开放的MATLAB运动控制软件环境
3.嵌入式工业用运动控制器(PC104总线),Windows开发平台
4.在线修改控制算法,实现更多、实时性更好的自定义控制功能
5.更方便地加入附加功能(语音,视觉),扩展性强
6.提供MATLAB控制接口
系统模型 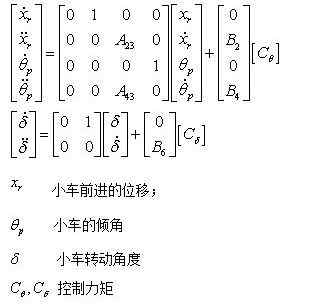 参考实验内容
MATLAB控制软件及其界面
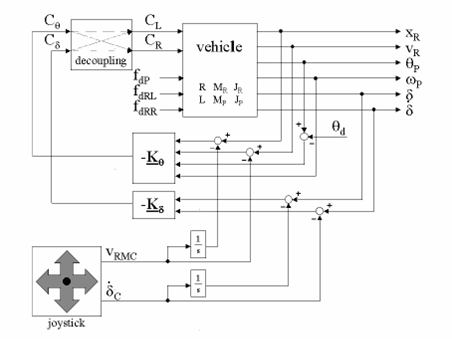
 控制方框图
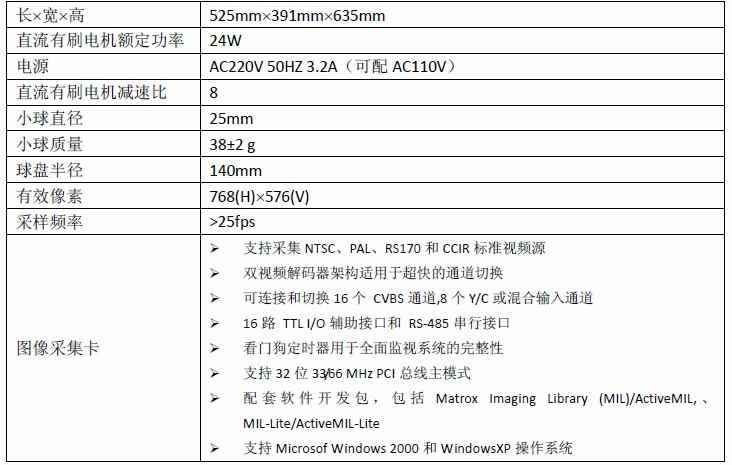
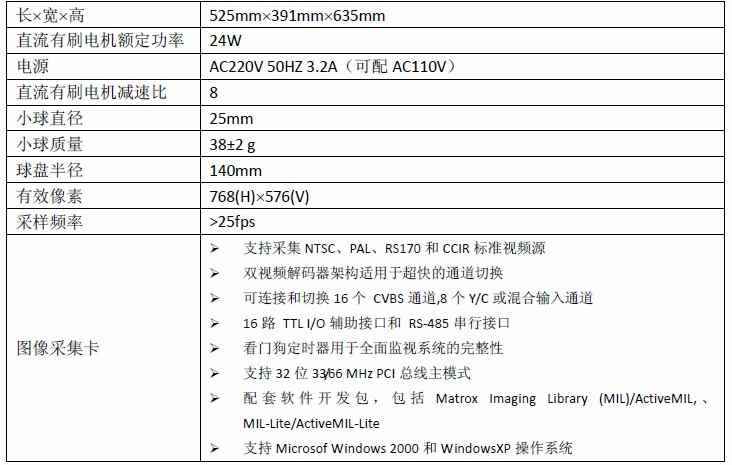
主要技术参数
定购指南
控制器架构
使用对象 综合了控制类课程的主要实验项目,可满足本科,研究生教学实验,课程设计,毕业设计以及算法研究等不同层次的教学需求。 |
url: http://www.51lm.cn/p/templates/cn/show.php?cid=905&aid=447
