1 еїЇзЂЛжХ∞е≠¶ж®°еЮЛзЪДжЦєж≥Х
ж®°еЮЛе∞±жШѓжККеЕ≥дЇОеЃЮйЩЕз≥їзїЯзЪДжЬђиі®зЪДйГ®еИЖдњ°жБѓзЃАзЉ©жИРжЬЙзФ®зЪДжППињ∞嚥еЉПпЉМеЃГзЪДдЄїи¶БеКЯиГљжШѓж®°жЛЯеЃЮйЩЕз≥їзїЯзЪДи°МдЄЇпЉМиАМдЄНжШѓеОїжППињ∞еЃЮйЩЕз≥їзїЯзЪДеЃЮйЩЕзїУжЮДгАВж®°еЮЛеПѓдї•еИЖдЄЇзЙ©зРЖж®°еЮЛеТМжХ∞е≠¶ж®°еЮЛгАВеїЇзЂЛжХ∞е≠¶ж®°еЮЛдЄАиИђжЬЙжЬЇзРЖеїЇж®°гАБйїСзЃ±еїЇж®°еТМзБ∞зЃ±еїЇж®°дЄЙзІНжЦєж≥ХгАВ
1.1 жЬЇзРЖеїЇж®°
еПИзІ∞зРЖиЃЇеїЇж®°жИЦзЩљзЃ±еїЇж®°пЉМж†єжНЃжЙАз†Фз©ґз≥їзїЯзЪДзЙ©зРЖжЬЇзРЖпЉМеИ©зФ®зЙ©иі®еТМиГљйЗПзЪДеЃИжБТжАІдї•еПКињЮзї≠жАІеОЯзРЖгАБжЬЙеЕ≥зЙ©зРЖеЃЪеЊЛпЉИзЙЫй°њеЃЪзРЖгАБжµБдљУеКЫе≠¶гАБзГ≠еКЫе≠¶еЃЪеЊЛз≠ЙпЉЙпЉМиАГиЩСзЙ©зРЖйЗПдєЛйЧізЪДеЕ≥з≥їпЉМжО®еѓЉеЗЇжХ∞е≠¶ж®°еЮЛгАВж≠§жЦєж≥ХйАВзФ®дЇОзЃАеНХз≥їзїЯзЪДеїЇж®°пЉМйАЪеЄЄиГљиЊЊеИ∞з≤ЊеЇ¶и¶Бж±ВгАВ
1.2 з≥їзїЯиЊ®иѓЖ
еПИзІ∞иѓХй™МеїЇж®°жИЦйїСзЃ±еїЇж®°пЉМеѓєдЇОдЄАдЄ™еЈ≤е≠ШеЬ®зЪДеЃЮйЩЕз≥їзїЯпЉМж†єжНЃиІВеѓЯпЉМжµЛйЗПеєґиЃ∞ељХеЊЧеИ∞зЪДиЊУеЕ•иЊУеЗЇжХ∞жНЃпЉМзїПињЗдЄАдЇЫеК†еЈ•е§ДзРЖпЉМж±ВеЗЇйЭЮеПВжХ∞жИЦеПВжХ∞ж®°еЮЛпЉМињЩзІНеїЇж®°жЦєж≥Хе∞±жШѓз≥їзїЯиЊ®иѓЖгАВињЩзІНжЦєж≥ХдЄНйЬАи¶БжЈ±еЕ•дЇЖиІ£ињЗз®ЛзЪДжЬЇзРЖпЉМйЬАи¶БзЪДеЕИй™МзЯ•иѓЖе∞СпЉМиГљжПРдЊЫзФ±еЕґдїЦжЦєж≥ХйЪЊдї•еїЇзЂЛзЪДзОѓеҐГжИЦеЩ™е£∞зЪДеК®жАБзЙєжАІгАВ
1.3 жЬЇзРЖеїЇж®°еТМиЊ®иѓЖзЫЄзїУеРИзЪДеїЇж®°ж≥Х
еПИзІ∞зБ∞зЃ±еїЇж®°пЉМеѓєз≥їзїЯињЫи°МжХ∞е≠¶еїЇж®°жЧґпЉМжЬЇзРЖеЈ≤зЯ•зЪДйГ®еИЖйЗЗзФ®зРЖиЃЇеїЇж®°жЦєж≥ХпЉМжЬЇзРЖжЬ™зЯ•зЪДйГ®еИЖйЗЗзФ®иЊ®иѓЖеїЇж®°зЪДжЦєж≥ХпЉМеПСжМ•дЄ§зІНжЦєж≥ХеРДиЗ™зЪДдЉШзВєпЉМеїЇзЂЛжЫідЄЇз≤Њз°ЃзЪДжХ∞е≠¶ж®°еЮЛгАВ
2 з≥їзїЯиЊ®иѓЖзЪДеЯЇжЬђж¶Вењµ
з≥їзїЯиЊ®иѓЖжШѓжОІеИґиЃЇзЪДдЄАдЄ™еИЖжФѓпЉМз≥їзїЯиЊ®иѓЖгАБзКґжАБдЉ∞иЃ°гАБжОІеИґзРЖиЃЇжЮДжИРдЇЖзО∞дї£жОІеИґиЃЇзЪДдЄЙе§ІжФѓжЯ±гАВйЪПзЭАеРДйЧ®е≠¶зІСзЪДеЃЪйЗПеМЦпЉМз≥їзїЯиЊ®иѓЖзЪДеЇФзФ®иґКжЭ•иґКеєњж≥ЫпЉМдЄНдїЕжШѓиИ™з©ЇгАБиș姩гАБзФµеКЫгАБеМЦеЈ•з≠ЙеЈ•з®ЛеЇФзФ®йҐЖеЯЯпЉМињШеїґдЉЄеИ∞зФЯзЙ©дњ°жБѓе≠¶гАБеМїе≠¶еЈ•з®ЛгАБз§ЊдЉЪзїПжµОз≠Йе§ЪеРДе≠¶зІСгАВдї•дЄЛжШѓдЄНеРМжЧґжЬЯзЪДе≠¶иАЕзїЩз≥їзїЯиЊ®иѓЖдЄЛзЪДеЃЪдєЙгАВ
2.1 L.A.ZadehеЃЪдєЙ
з≥їзїЯиЊ®иѓЖпЉИSystem IdentificationпЉЙе∞±жШѓеЬ®иЊУеЕ•еТМиЊУеЗЇжХ∞жНЃзЪДеЯЇз°АдЄКпЉМдїОдЄАзїДзїЩеЃЪзЪДж®°еЮЛз±їдЄ≠пЉМз°ЃеЃЪдЄАдЄ™дЄОжЙАжµЛз≥їзїЯз≠ЙдїЈзЪДж®°еЮЛгАВе±ЮдЇОйїСзЃ±ж®°еЮЛгАВ
2.2 P.EykhoffеЃЪдєЙ
иЊ®иѓЖйЧЃйҐШеПѓдї•ељТзїУдЄЇзФ®жЯРдЄ™ж®°еЮЛжЭ•иЊ®иѓЖеЃҐиІВз≥їзїЯ(жИЦе∞Жи¶БжЮДйА†зЪДз≥їзїЯ)жЬђиі®зЙєеЊБзЪДжЉФзЃЧ,еєґзФ®ињЩдЄ™ж®°еЮЛжККеѓєеЃҐиІВз≥їзїЯзЪДзРЖиІ£и°®з§ЇжИРжЬЙзФ®зЪД嚥еЉПгАВ
2.3 L.LjungеЃЪдєЙ
иЊ®иѓЖжЬЙ3дЄ™и¶Бзі†——жХ∞жНЃгАБж®°еЮЛз±їеТМеЗЖеИЩгАВиЊ®иѓЖе∞±жШѓжМЙзЕІжЯРдЄ™еЗЖеИЩеЬ®ж®°еЮЛз±їдЄ≠йАЙжЛ©дЄОжХ∞жНЃжЛЯеРИжЬАе•љзЪДж®°еЮЛгАВеЕґдЄ≠пЉМжХ∞жНЃпЉИиГљиІВжµЛеИ∞зЪДиЊУеЕ•жИЦиЊУеЗЇжХ∞жНЃпЉЙжШѓиЊ®иѓЖзЪДеЯЇз°АпЉМж®°еЮЛз±їпЉИжЙАиАГиЩСзЪДж®°еЮЛзЪДзїУжЮДпЉЙжШѓеѓїжЙЊзЪДж®°еЮЛиМГеЫіпЉМз≠ЙдїЈеЗЖеИЩпЉИзФ®жЭ•и°°йЗПж®°еЮЛжО•ињСеЃЮйЩЕз≥їзїЯзЪДж†ЗеЗЖпЉЙжШѓиЊ®иѓЖзЪДдЉШеМЦзЫЃж†ЗгАВ
жАїиАМи®АдєЛпЉМз≥їзїЯиЊ®иѓЖзЪДеЃЮиі®е∞±жШѓжМЙзЕІжЯРзІНеОЯеИЩпЉМеИ©зФ®жЙАиІВжµЛеИ∞зЪДеРЂжЬЙеЩ™е£∞зЪДиЊУеЕ•иЊУеЗЇжХ∞жНЃпЉМдїОдЄАз±їж®°еЮЛдЄ≠з°ЃеЃЪдЄАдЄ™дЄОжЙАжµЛз≥їзїЯжЛЯеРИжЬАе•љзЪДж®°еЮЛгАВ
3 з≥їзїЯиЊ®иѓЖзЪДеЖЕеЃєеПКж≠•й™§
еЫЊ3-1 з≥їзїЯиЊ®иѓЖзЪДеЖЕеЃєеПКж≠•й™§
3.1 иОЈеПЦй™МеЙНзЯ•иѓЖгАБжШОз°ЃиЊ®иѓЖзЫЃзЪД
еЬ®иЊ®иѓЖдєЛеЙНеЇФдЇЖиІ£е∞љеПѓиГље§ЪзЪДжЬЙеЕ≥еѓєи±°зЪДзЯ•иѓЖпЉМдї•еЗПе∞СиЊ®иѓЖињЗз®ЛдЄ≠зЪДеЫ∞йЪЊгАВйЬАи¶БзЯ•йБУиЊ®иѓЖзЪДдЄАиИђињЗз®ЛгАБз≥їзїЯињРи°МжЭ°дїґгАБеЈ•дљЬињЗз®ЛгАБжФѓйЕНињЗз®ЛзЪДзЙ©зРЖеЃЪеЊЛгАБжЯРдЇЫйҐДжµЛиѓХй™МгАВ
иОЈеПЦйҐДе§ЗзЯ•иѓЖзЪДй¶Ци¶БйЧЃйҐШжШѓиЊ®иѓЖзЫЃзЪДпЉМжђ≤дЇЖиІ£з≥їзїЯзЪДжЯРдЇЫзЙєжАІпЉИиЗ™зДґйҐСзОЗгАБйШїе∞Љз≥їжХ∞гАБжФЊе§Із≥їжХ∞з≠ЙпЉЙпЉМеП™и¶БйЭЮеПВжХ∞ж®°еЮЛпЉИе¶Вж≥ҐеЊЈеЫЊпЉЙеН≥еПѓпЉЫжђ≤еѓєз≥їзїЯињЫи°МжОІеИґпЉИе¶ВиЗ™йАВеЇФжОІеИґпЉЙпЉМеИЩйЬАжЙЊеЗЇеПВжХ∞ж®°еЮЛгАВиЊ®иѓЖзЪДзЫЃзЪДе∞ЖеЖ≥еЃЪж®°еЮЛз±їеЮЛгАБз≤ЊеЇ¶и¶Бж±ВгАБиЊ®иѓЖи¶Бж±ВгАБиЊ®иѓЖжЦєж≥ХгАВ
3.2 еЃЮй™МиЃЊиЃ°
еЃЙжОТеЃЮй™МзЪДзЫЃзЪДжШѓдЄЇдЇЖиОЈеЊЧиЊУеЕ•иЊУеЗЇжХ∞жНЃгАВиЊУеЕ•еПШйЗПеЇФиГље§ЯиЃЊзљЃпЉМдЄФењЕй°їеМЕеРЂиґ≥е§ЯдЄ∞еѓМзЪДйҐСзОЗеИЖйЗПпЉМиЊУеЗЇеПШйЗПеЇФиГље§ЯжµЛйЗПпЉМеєґдЄФеТМжИСдїђжДЯеЕіиґ£зЪДзО∞и±°жЬЙеЕ≥гАВиЃЊиЃ°еЃЮй™МзЪДеОЯеИЩжШѓжЙАиОЈеЊЧзЪДжХ∞жНЃпЉИеѓєз†Фз©ґзЫЃзЪДжЭ•иѓіпЉЙеМЕеРЂзЪДдњ°жБѓи¶Бе∞љеПѓиГљеЬ∞е§ЪгАВељУзДґпЉМињШи¶БиАГиЩСеИ∞еЃЮзО∞зЪДеПѓиГљжАІеПКеЃЮй™МиієзФ®з≠ЙгАВ
еЃЮй™МиЃЊиЃ°дЄ≠и¶БиАГиЩСзЪДйЧЃйҐШеМЕжЛђпЉЪеЬ®з≥їзїЯиЊУеЕ•еЕБиЃЄзЪДжГЕеЖµдЄЛпЉМе¶ВдљХйАЙжЛ©иЊУеЕ•дњ°еПЈгАБйЗЗж†ЈйАЯеЇ¶гАБеЃЮй™МжЬЯйЩРеПКеБЪеУ™дЇЫйҐДе§ЗжАІеЃЮй™Мз≠ЙгАВзФ±дЇОиІВжµЛеИ∞зЪДжХ∞жНЃдЄАиИђеРЂжЬЙеЩ™е£∞пЉМеЫ†ж≠§иЊ®иѓЖеїЇж®°еЃЮйЩЕдЄКжШѓдЄАзІНиѓХй™МзїЯиЃ°жЦєж≥ХгАВ
еЫЊ3-2 еЃЮй™МиЃЊиЃ°
3.3 з°ЃеЃЪж®°еЮЛзїУжЮД
йЩ§дЇЖеНХеПШйЗПзЇњжАІз≥їзїЯзЪДйШґгАБе§ЪеПШйЗПзЇњжАІз≥їзїЯзЪДзїУжЮДдЄНеПШйЗПеТМдЄАдЇЫйАЉињСзЃЧж≥ХзЪДињСдЉЉж®°еЮЛпЉМж®°еЮЛзЪДзїУжЮДдЄїи¶БжШѓдЊЭйЭ†еЕИй™МзЯ•иѓЖжЭ•еЖ≥еЃЪзЪДгАВж®°еЮЛ嚥еЉПжЬЙе§ЪзІНпЉМжЬАеЄЄиІБзЪДжШѓйЪПжЬЇгАБзЇњжАІгАБеК®жАБгАБз¶їжХ£з≥їзїЯгАВеЬ®ињЩдЄАзОѓиКВдЄ≠пЉМи¶Бж≥®жДПж®°еЮЛйШґжђ°зЪДйАЙжЛ©гАБзЇѓжїЮеРОжЧґйЧізЪДдЉ∞иЃ°з≠ЙжЦєйЭҐгАВ
3.4 еПВжХ∞дЉ∞иЃ°
ж®°еЮЛзЪДжЬ™зЯ•йГ®еИЖжШѓдї•жЬ™зЯ•еПВжХ∞зЪД嚥еЉПеЗЇзО∞зЪДгАВжИСдїђйЬАи¶БйАЪињЗжЯРзІНжЦєж≥Хз°ЃеЃЪжЬ™зЯ•еПВжХ∞пЉМдїОиАМеЊЧеИ∞еПВжХ∞ж®°еЮЛгАВж®°еЮЛзїУжЮДз°ЃеЃЪеРОпЉМиЊ®иѓЖдЄїи¶Бе∞±жШѓйАЪињЗеЃЮй™МжХ∞жНЃеОїдЉ∞иЃ°жЬ™зЯ•еПВжХ∞гАВеЫ†ж≠§пЉМеПВжХ∞дЉ∞иЃ°жШѓиЊ®иѓЖеЈ•дљЬзЪДдЄїи¶БеЖЕеЃєпЉМжШѓдЄАдЄ™еЕЈдљУзЪДиЊ®иѓЖињЗз®ЛдЄ≠еЈ•дљЬйЗПжЬАе§ІзЪДйГ®еИЖгАВ
3.5 ж®°еЮЛй™МиѓБ
е∞ЖеЃЮйЩЕзЪДжµЛйЗПиЊУеЗЇеТМж®°еЮЛзЪДиЃ°зЃЧиЊУеЗЇзЫЄжѓФиЊГпЉМж®°еЮЛеПВжХ∞еЇФељУдњЭиѓБдЄ§дЄ™иЊУеЗЇдєЛйЧіеЬ®йАЙеЃЪжДПдєЙдЄКзЪДжО•ињСгАВиЛ•дЄНдЄАиЗіпЉМйЬАдњЃжФєж®°еЮЛзїУжЮДзЪДеБЗиЃЊпЉМдњЃжФєеЃЮй™МиЃЊиЃ°пЉМйЗНе§НиѓХй™МгАВиІ£еЖ≥ињЩдЄ™йЧЃйҐШзЫЃеЙНињШж≤°жЬЙдїАдєИз≥їзїЯзЪДжЦєж≥ХпЉМеП™жШѓйЪПзЭАйЧЃйҐШзЪДдЄНеРМиАМжПРеЗЇеЕЈдљУзЪДиІ£еЖ≥еКЮж≥ХгАВ
4 з≥їзїЯиЊ®иѓЖеЈ•еЕЈзЃ±еЯЇжЬђзРЖиЃЇ
еАЯеК©MATLABз≥їзїЯиЊ®иѓЖеЈ•еЕЈзЃ±пЉИе¶ВеЫЊ4-1жЙАз§ЇпЉЙињЫи°МеїЇж®°пЉМеПѓзЃАеМЦиЃ°зЃЧињЗз®ЛгАБжПРйЂШжХИзОЗпЉМдљњеїЇж®°ињЗз®ЛзЫіиІВгАБ嚥豰гАВеИ©зФ®MATLABз≥їзїЯиЊ®иѓЖеЈ•еЕЈзЃ±ињЫи°Мз≥їзїЯиЊ®иѓЖдЄїи¶БеМЕжЛђдї•дЄЛеЖЕеЃєпЉЪиІВжµЛжХ∞жНЃзЪДиОЈеПЦгАБжХ∞жНЃйҐДе§ДзРЖгАБж®°еЮЛзїУжЮДзЪДйАЙжЛ©гАБеПВжХ∞дЉ∞иЃ°гАБж®°еЮЛж£Ай™МдЄОеК®жАБдїњзЬЯгАВ
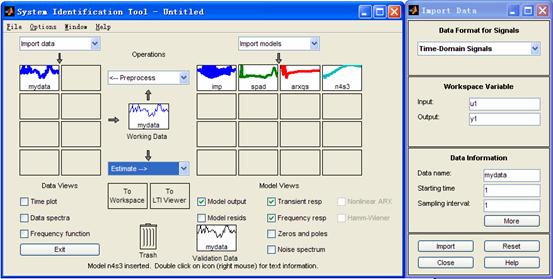
еЫЊ4-1 з≥їзїЯиЊ®иѓЖеЈ•еЕЈзЃ±
4.1 иІВжµЛжХ∞жНЃзЪДиОЈеПЦ
иІВжµЛжХ∞жНЃеРЂиЊУеЕ•гАБиЊУеЗЇгАБеЩ™е£∞з≠ЙпЉМеЈ•еЕЈзЃ±жПРдЊЫз≥їзїЯиЊ®иѓЖзЪДиЊУеЕ•дњ°еПЈеЗљжХ∞idinputпЉМи∞ГзФ®ж†ЉеЉПдЄЇпЉЪu=idinput(NпЉМtypeпЉМbandпЉМlevels)гАВеЗљжХ∞idfiltеИ©зФ®Butterworthжї§ж≥ҐеЩ®еѓєжХ∞жНЃињЫи°Мжї§ж≥ҐпЉМеИ©зФ®idresampеЗљжХ∞еѓєиЊУеЕ•иЊУеЗЇжХ∞жНЃињЫи°МйЗНжЦ∞йЗЗж†ЈжЭ•жПТеАЉжИЦеИ†еЗПжХ∞жНЃз≠ЙгАВ
4.2 жХ∞жНЃйҐДе§ДзРЖ
з≥їзїЯеїЇж®°жЧґпЉМи¶Бж±ВиЊУеЕ•иЊУеЗЇжХ∞жНЃзЪДзїЯиЃ°зЙєжАІдЄОзїЯиЃ°жЧґйЧіиµЈзВєжЧ†еЕ≥пЉМдЄФеЭЗеАЉдЄЇ0гАВиАМеЃЮйЩЕжµЛйЗПзЫіжО•еЊЧеИ∞зЪДжХ∞жНЃжШѓйЪПжЬЇжЧґйЧіеЇПеИЧпЉМдЄЇдЇЖиОЈеЊЧжЫізђ¶еРИеЃЮйЩЕжГЕеЖµзЪДз≥їзїЯж®°еЮЛпЉМењЕй°їеЕИеѓєжµЛйЗПжХ∞жНЃињЫи°МйҐДе§ДзРЖгАВдЄїи¶БеМЕжЛђжґИйЩ§жХ∞жНЃзЪДиґЛеКњй°єгАБеѓєжµЛйЗПжХ∞жНЃињЫи°Мжї§ж≥ҐеТМйЗНжЦ∞йЗЗж†ЈгАВеЬ®з≥їзїЯиЊ®иѓЖеЈ•еЕЈзЃ±дЄ≠пЉМеЗљжХ∞dtrendзФ®жЭ•еОїйЩ§иЊУеЕ•иЊУеЗЇжХ∞жНЃдЄ≠зЪДиґЛеКњй°єпЉМи∞ГзФ®ж†ЉеЉПдЄЇпЉЪzd=dtrend(zпЉМoпЉМbrkp)гАВ
4.3 ж®°еЮЛзїУжЮДзЪДйАЙжЛ©
з≥їзїЯиЊ®иѓЖеЈ•еЕЈзЃ±жПРдЊЫеѓєе§ЪзІНж®°еЮЛз±їзЪДжФѓжМБпЉМеМЕжЛђйЭЮеПВжХ∞еТМеПВжХ∞з≠Йж®°еЮЛз±їгАВйЭЮеПВжХ∞ж®°еЮЛз±їеМЕжЛђиДЙеЖ≤еУНеЇФеТМйҐСеЯЯжППињ∞з≠Йж®°еЮЛгАВеПВжХ∞ж®°еЮЛз±їжЬЙARXгАБARMAXгАБBJгАБиЊУеЗЇиѓѓеЈЃеТМзКґжАБз©ЇйЧіз≠Йж®°еЮЛгАВ
з≥їзїЯиЊ®иѓЖеЈ•еЕЈзЃ±жПРдЊЫзЪДж®°еЮЛзїУжЮДйАЙжЛ©еЗљжХ∞жЬЙstrucгАБarxstrucгАБivstrucеТМselstrucгАВ
еЬ®ж≠§жђ°зФµеК®иљ¶жЬЇеЩ®дЇЇз≥їзїЯиЊ®иѓЖиѓЊйҐШдЄ≠пЉМжИСдїђйАЙзФ®ARXж®°еЮЛжЭ•еЃЮзО∞з≥їзїЯиЊ®иѓЖгАВињЩе∞±жДПеС≥зЭАжИСдїђе∞ЖеБЗеЃЪз≥їзїЯзЪДзЬЯеЃЮж®°еЮЛеЕЈжЬЙARXж®°еЮЛзЪДзїУжЮДгАВеЕґзїУжЮДе¶ВдЄЛпЉЪ
A(zпЉН1)Y(k)=B(zпЉН1)U(k)+e(k)
йАЪињЗеѓїжЙЊдЄАдЄ™еЕЈжЬЙиЊГе∞ПAICеАЉзЪДдЉ∞иЃ°ж®°еЮЛжЭ•еЖ≥еЃЪж®°еЮЛзЪДйШґжђ°гАВAICеАЉзФ±дЄЛеЉПеЃЪдєЙ:
AIC=Log(V)+2d/N
еЉПдЄ≠пЉМVдЄЇжНЯ姱еЗљжХ∞пЉМdдЄЇдЉ∞иЃ°еПВжХ∞зЪДдЄ™жХ∞пЉМNдЄЇдЉ∞иЃ°жХ∞жНЃзЪДдЄ™жХ∞гАВ
4.4 еПВжХ∞дЉ∞иЃ°
з≥їзїЯиЊ®иѓЖеЈ•еЕЈзЃ±дЄ≠пЉМжФѓжМБзЪДеПВжХ∞ж®°еЮЛеМЕжЛђARгАБARXгАБARMAXгАБBJгАБзКґжАБз©ЇйЧіеТМиЊУеЗЇиѓѓеЈЃз≠Йж®°еЮЛпЉМеРЂдЄАжђ°еЃМжИРеТМйАТжО®иЊ®иѓЖз≠ЙзЃЧж≥ХгАВдЄАжђ°еЃМжИРзЃЧж≥ХзЪДеПВжХ∞ж®°еЮЛиЊ®иѓЖеЗљжХ∞жЬЙarгАБarxгАБarmaxгАБivxз≠ЙгАВзФ®йАТжО®зЃЧж≥ХињЫи°МеПВжХ∞ж®°еЮЛиЊ®иѓЖзЪДеЗљжХ∞жЬЙrarxгАБrarmaxз≠ЙгАВ
4.5 ж®°еЮЛж£Ай™МдЄОеК®жАБдїњзЬЯ
еЈ•еЕЈзЃ±дЄ≠пЉМзФ®дЇОж®°еЮЛй™МиѓБеТМдїњзЬЯзЪДеЗљжХ∞дЄїи¶БжЬЙcompareгАБresidгАБpeгАБpredictеТМidsimгАВеЕґдЄ≠пЉЪcompareеПѓе∞Жж®°еЮЛзЪДйҐДжµЛиЊУеЗЇдЄОеѓєи±°еЃЮйЩЕиЊУеЗЇињЫи°МжѓФиЊГпЉМresidзФ®жЭ•иЃ°зЃЧеТМж£Ай™Мж®°еЮЛжЃЛеЈЃпЉЫpeиЃ°зЃЧйҐДжµЛиѓѓеЈЃпЉЫpredictйҐДжµЛжЬ™жЭ•иЊУеЗЇпЉЫidsimеПѓињЫи°Мж®°еЮЛдїњзЬЯиЃ°зЃЧгАВ
жЬђжђ°иЃЊиЃ°дЄ≠пЉМжИСдїђйАЙжЛ©еПВжХ∞ж®°еЮЛз±їARXињЫи°МеїЇж®°пЉМеИ©зФ®strucеЗљжХ∞зФЯжИРе§ЪдЄ™ж®°еЮЛзїУжЮДеПВжХ∞пЉМеИ©зФ®arxstrucеЗљжХ∞иЃ°зЃЧе§ЪдЄ™еНХARXж®°еЮЛзЪДжНЯ姱еЗљжХ∞пЉМиАМselstrucеЗљжХ∞зФ®дЇОз°ЃеЃЪйШґжђ°еТМйАЙжЛ©ж®°еЮЛзїУжЮДпЉМarxеЗљжХ∞еПѓдї•иЃ°зЃЧеЗЇARXж®°еЮЛеПВжХ∞гАВ
5 еЯЇдЇОз≥їзїЯиЊ®иѓЖеЈ•еЕЈзЃ±зЪДзФµеК®иљ¶жЬЇеЩ®дЇЇиЊ®иѓЖдїњзЬЯ
5.1 иІВжµЛжХ∞жНЃзЪДиОЈеПЦ
еЬ®зФµеК®иљ¶жЬЇеЩ®дЇЇз≥їзїЯиЊ®иѓЖйЧЃйҐШдЄ≠пЉМзФ®жЭ•еЃМжИРз≥їзїЯиЊ®иѓЖзЪДжХ∞жНЃдЄЇдЄАзїДеНХиЊУеЕ•еНХиЊУеЗЇжХ∞жНЃпЉМеН≥SISOжХ∞жНЃпЉМзФ±дЄ§йГ®еИЖжЮДжИР:дљЬдЄЇиЊУеЕ•жХ∞жНЃзЪДзФµеК®иљ¶жЬЇеЩ®дЇЇжККжЙЛй©±еК®зФµжЬЇзЪДй©±еК®зФµеОЛ(еНХдљНдЄЇжѓЂдЉП)еТМдљЬдЄЇиЊУеЗЇжХ∞жНЃзЪДзФµеК®иљ¶жЬЇеЩ®дЇЇиљ¶дљУзЫЄеѓєеЮВзЫіжЦєеРСзЪДеАЊжЦЬиІТеЇ¶(еНХдљНдЄЇеЇ¶)гАВй©±еК®зФµеОЛuйАЪињЗзФµдљНиЃ°жµЛйЗПиАМжЭ•пЉМеАЊжЦЬиІТеЇ¶yйАЪињЗеАЊиІТдЉ†жДЯеЩ®жµЛйЗПжЙАеЊЧгАВињЩдЇЫжХ∞жНЃе±ЮдЇОйЪПжЬЇжЧґйЧіеЇПеИЧпЉМеМЕеРЂжЬЙзЇњеЮЛжИЦзЉУжЕҐеПШеМЦзЪДиґЛеКњгАВжЬђжђ°иЃЊиЃ°жИСдїђеЊЧеИ∞дЄ§зїДжХ∞жНЃпЉМдЄАзїДзФ®дЇОеїЇж®°пЉМеП¶дЄАзїДзФ®дЇОж®°еЮЛй™МиѓБгАВ
5.2 жХ∞жНЃйҐДе§ДзРЖ
з≥їзїЯеПВжХ∞иЃЊеЃЪпЉЪиЊУеЕ•u(k)дЄЇзФµеОЛпЉМиЊУеЗЇy(k)дЄЇдЉ†жДЯеЩ®жµЛйЗПеЊЧеИ∞зЪДзФµеК®иљ¶жЬЇеЩ®дЇЇиљ¶дљУеАЊжЦЬиІТеЇ¶гАВbicycle2.matдЄЇз≥їзїЯиЊУеЕ•/иЊУеЗЇзЪДжµЛиѓХжХ∞жНЃгАВз≥їзїЯж®°еЮЛзїУжЮДе¶ВеЫЊ5-1жЙАз§ЇгАВ
еЫЊ5-1з≥їзїЯж®°еЮЛзїУжЮДеЫЊ
y1еМЕеРЂ150дЄ™еАЊиІТжµЛйЗПеАЉпЉМu1дЄЇ150дЄ™иЊУеЕ•зФµеОЛйЗЗж†ЈеАЉпЉМйЗЗж†ЈеС®жЬЯдЄЇ1/15sгАВй¶ЦеЕИжИСдїђе∞Жз≥їзїЯиЊУеЕ•/иЊУеЗЇжХ∞жНЃиЃЊзљЃжИРIDDATA僺豰嚥еЉП:
load bicycle1
datal=[1653 -8 1656 -5 1656 -3 1656 -2 6565……1955 -5 2001 -4]; %еѓЉеЕ•жЙАжЬЙ150еѓєжµЛйЗПжХ∞жНЃ
u1=data1(1:2:299); %зФЯжИР150дЄ™иЊУеЕ•жХ∞жНЃзїДжИРзЪДиЊУеЕ•еРСйЗП
y1=data1(2:2:300); %зФЯжИР150дЄ™иЊУеЗЇжХ∞жНЃзїДжИРзЪДиЊУеЗЇеРСйЗП
ul=ul’;
yl=yl’; %е∞ЖиЊУеЕ•иЊУеЗЇеРСйЗПиљђеМЦдЄЇеИЧеРСйЗПпЉМдї•жї°иґ≥iddataеЗљжХ∞ж†ЉеЉПи¶Бж±В
bicycle1=iddata(y1,u1,1/15); %зФЯжИРеМЕеРЂиЊУеЕ•иЊУеЗЇжХ∞жНЃзЪДiddataеѓєи±°
bicycle1.inputname=‘й©±еК®зФµеОЛ’;
bicyele1.outputname=‘иљ¶дљУеАЊиІТ’;
ze1=bicycle1(1:75); %еПЦеЕґдЄ≠зЪД75еѓєжХ∞жНЃдљЬдЄЇж®°еЮЛиЊ®иѓЖзЪДиЊУеЕ•гАБиЊУеЗЇжХ∞жНЃеРСйЗП
figureпЉМplot(ze1(1:75)) %зїШеИґеЕґдЄ≠75еѓєжХ∞жНЃзЪДиЊУеЕ•иЊУеЗЇеЫЊи±°
ињРи°МзїУжЮЬе¶ВеЫЊ5-2жЙАз§ЇгАВ
еЫЊ5-2 иЊУеЕ•иЊУеЗЇеЫЊеГП
дїОеЫЊи±°еПѓдї•жШОжШЊзЬЛеЗЇпЉМиѓ•еЇПеИЧзЪДеЭЗеАЉдЄНдЄЇйЫґпЉМиАМдЄФйЪПжЧґйЧіеПШеМЦпЉМеЫ†ж≠§ењЕй°їињЫи°Меє≥з®≥еМЦйҐДе§ДзРЖпЉМдЄїи¶БжШѓжґИйЩ§жХ∞жНЃзЪДиґЛеКњй°єпЉМжККжµЛйЗПзЪДжХ∞жНЃеПШжИРеЭЗеАЉдЄЇйЫґзЪДеє≥з®≥ињЗз®ЛгАВеЬ®ж≠§жИСдїђйЗЗзФ®MATLABз≥їзїЯиЊ®иѓЖеЈ•еЕЈзЃ±дЄ≠зЪДdtrendеЗљжХ∞гАВ
zel=dtrend(zel); %еѓєзФ®дЇОиЊ®иѓЖзЪДиЊУеЕ•гАБиЊУеЗЇжХ∞жНЃеРСйЗПињЫи°МжХ∞жНЃйҐДе§ДзРЖпЉЫ
ињРи°МзїУжЮЬе¶ВеЫЊ5-3жЙАз§ЇгАВ

еЫЊ5-3 жХ∞жНЃйҐДе§ДзРЖзїУжЮЬ
дїОеЫЊдЄ≠еПѓдї•зЬЛеИ∞пЉМзїПињЗжХ∞жНЃйҐДе§ДзРЖеРОзЪДжµЛйЗПжХ∞жНЃжґИйЩ§дЇЖжХ∞жНЃдЄ≠зЪДиґЛеКњй°єпЉМиОЈеЊЧдЇЖжѓФиЊГзРЖжГ≥зЪДе§ДзРЖжХИжЮЬгАВ
5.3 ж®°еЮЛзїУжЮДзЪДйАЙжЛ©еТМйШґжђ°з°ЃеЃЪ
жИСдїђйАЙжЛ©еПВжХ∞ж®°еЮЛз±їARXињЫи°МеїЇж®°пЉМи∞ГзФ®ж†ЉеЉПдЄЇ:M=ARX(DATAпЉМORDERS)гАВеЕґдЄ≠пЉМORDERS=[na nb nk]пЉМдЄЇж®°еЮЛйШґжђ°еРСйЗПпЉЫDATAдЄЇиЊ®иѓЖж®°еЮЛзЪДиЊУеЕ•иЊУеЗЇжХ∞жНЃзїДгАВORDERSзЪДеАЉеПЦдЄАеЃЪиМГеЫіеЖЕ(naгАБnbгАБncзЪДеПШеМЦиМГеЫіеЭЗдЄЇ1еИ∞10)дЉ∞иЃ°ж®°еЮЛзЪДAICеАЉжЬАе∞ПзЪДж®°еЮЛжЙАеѓєеЇФзЪДйШґжђ°гАВ
MATLABдЄ≠ж®°еЮЛзїУжЮДйАЙжЛ©еЗљжХ∞дЄЇselstrucпЉМAICжЮБе∞ПеМЦж®°еЮЛйАЙжЛ©еЗљжХ∞зЪДи∞ГзФ®ж†ЉеЉПдЄЇ:nn=selstruc(VпЉМ’aic’)пЉМеЕґдЄ≠пЉМVдЄЇеРДдЄ™ж®°еЮЛзїУжЮДзЪДжНЯ姱еЗљжХ∞гАВжХЕдЄЇж±ВеЊЧж®°еЮЛзЪДйШґжђ°ењЕй°їеЊЧеИ∞еРДдЄ™ж®°еЮЛзїУжЮДзЪДжНЯ姱еЗљжХ∞гАВ
MATLABдЄ≠иЃ°зЃЧе§ЪдЄ™еНХARXж®°еЮЛжНЯ姱еЗљжХ∞зЪДеЗљжХ∞дЄЇarxstrucпЉМи∞ГзФ®ж†ЉеЉПдЄЇ:V=arxstruc(zeпЉМzvпЉМNN)гАВеЕґдЄ≠пЉМzeдЄЇзФ®дЇОж®°еЮЛиЊ®иѓЖзЪДиЊУеЕ•гАБиЊУеЗЇжХ∞жНЃеРСйЗПжИЦзЯ©йШµпЉЫzvдЄЇзФ®дЇОж®°еЮЛй™МиѓБзЪДиЊУеЕ•гАБиЊУеЗЇжХ∞жНЃеРСйЗПжИЦзЯ©йШµпЉЫNNдЄЇе§ЪдЄ™ж®°еЮЛзїУжЮДеПВжХ∞жЮДжИРзЪДзЯ©йШµпЉМNNжѓПдЄАи°МеЕЈжЬЙе¶ВдЄЛ嚥еЉП:nn=[na nb nk]гАВ
иАМзФЯжИРе§ЪдЄ™ж®°еЮЛзїУжЮДеПВжХ∞зЪДеЗљжХ∞дЄЇstrucпЉМи∞ГзФ®ж†ЉеЉПдЄЇNN=struc(NA NB NK)пЉМеЕґдЄ≠NAгАБNBгАБNKеИЖеИЂдЄЇARXж®°еЮЛе§Ъй°єеЉПA(q)гАБB(q)зЪДйШґжђ°иМГеЫіеТМзЇѓжЧґеїґе§Іе∞ПиМГеЫігАВ
зФ®дЇОж®°еЮЛзїУжЮДйАЙжЛ©еТМйШґжђ°з°ЃеЃЪзЪДдї£з†Бе¶ВдЄЛ:
NN=struc(l:10пЉМl:10пЉМl:10); %зФЯжИРе§ЪдЄ™ж®°еЮЛзїУжЮДеПВжХ∞
V=arxstruc(bicycle1(1:75)пЉМbicycle1(75:150)пЉМNN); %иЃ°зЃЧе§ЪдЄ™еНХARXж®°еЮЛзЪДжНЯ姱еЗљжХ∞
nn=selstruc(VпЉМ’aic’); %з°ЃеЃЪйШґжђ°пЉМйАЙжЛ©ж®°еЮЛзїУжЮД
зїПзЉЦз®Лж±ВеЊЧжЬАдљ≥ж®°еЮЛйШґжђ°зїДеРИдЄЇ(2пЉМ1пЉМ4)гАВ
5.4 з°ЃеЃЪж®°еЮЛеПВжХ∞
MATLABдЄ≠жПРдЊЫдЇЖе§ЪзІНеПВжХ∞иЊ®иѓЖзЪДжЦєж≥ХеТМеЗљжХ∞пЉМжИСдїђйАЙеПЦеЕґдЄ≠зЪДеЯЇдЇОжЬАе∞ПдЇМдєШж≥ХдЉ∞иЃ°зЪДARXеПВжХ∞иЊ®иѓЖжЦєж≥ХпЉМеН≥и∞ГзФ®ARXеЗљжХ∞ињЫи°Мж®°еЮЛеПВжХ∞з°ЃеЃЪгАВ
M=arx(zelпЉМ[2пЉМ1пЉМ4]); %з°ЃеЃЪARXж®°еЮЛеПВжХ∞
ињРи°МеРОеЊЧеИ∞зЪДж®°еЮЛеПВжХ∞дЄЇ:
Discrete-time IDPOLY model: A(q)y(t) = B(q)u(t) + e(t)
A(q) = 1 - 0.3683 q^-1 - 0.08285 q^-2
B(q) = -0.01239 q^-4
Estimated using ARX from data set ze1
Loss function 15.7651 and FPE 17.0789
Sampling interval: 0.0666667
5.5 ж®°еЮЛйШґжХ∞й™МиѓБеТМж®°еЮЛй™МиѓБ
дЄЇдЇЖй™МиѓБARXж®°еЮЛзЪДжЬЙжХИжАІпЉМеП¶йЗЗж†ЈжПРеПЦдЇЖдЄАзїДжХ∞жНЃ(еОїйЩ§иґЛеКњй°єеРОпЉМе¶ВеЫЊ5-4жЙАз§Ї)пЉМжѓФиЊГдЇЖж®°еЮЛиЊУеЗЇдЄОз≥їзїЯеЃЮйЩЕиЊУеЗЇ(еЫЊ5-5)пЉМеєґињЫи°МдЇЖзЫЄеЕ≥жАІеИЖжЮР(еЫЊ5-6)гАВзїУжЮЬжШЊз§ЇпЉЪж®°еЮЛиЊУеЗЇеТМз≥їзїЯеЃЮйЩЕиЊУеЗЇдєЛйЧіе≠ШеЬ®дЄАеЃЪзЪДиѓѓеЈЃпЉМзЫЄеЕ≥жАІеТМдЇТзЫЄеЕ≥жАІи°®жШОпЉМжЙАеїЇж®°еЮЛзЪДж®°еЮЛиЊУеЗЇеЯЇжЬђдЄКиГље§ЯжЛЯеРИз≥їзїЯеЃЮйЩЕиЊУеЗЇпЉМжППињ∞з≥їзїЯеЬ®еЫЇеЃЪеє≥и°°зВєзЪДеК®жАБзЙєжАІгАВ

еЫЊ5-4 еОїиґЛеКњй°єеРОзЪДиЊУеЕ•иЊУеЗЇеЫЊ

еЫЊ5-5 ж®°еЮЛиЊУеЗЇдЄОжµЛйЗПиЊУеЗЇжѓФиЊГеЫЊ
еЫЊ5-6 ж®°еЮЛиѓѓеЈЃзЫЄеЕ≥еИЖжЮРеЫЊ
еЫЊ5-7 йҐСзОЗеУНеЇФеЫЊ
еЫЊ5-8 йЫґжЮБзВєеИЖеЄГеЫЊ
6 зїУиЃЇеПКжАїзїУ
жЬђжЦЗеѓєзФµеК®иљ¶жЬЇеЩ®дЇЇжОІеИґз≥їзїЯињЫи°МдЇЖARXеїЇж®°з†Фз©ґгАВй¶ЦеЕИпЉМйАЙзФ®AICеЗЖеИЩдљЬдЄЇз≥їзїЯж®°еЮЛйШґжђ°зЪДйАЙжЛ©еОЯеИЩйАЙеЃЪдЇЖз≥їзїЯж®°еЮЛзЪДйШґжђ°пЉЫзДґеРОдї•жЬАе∞ПдЇМдєШж≥ХжЭ•иЊ®иѓЖж®°еЮЛзЪДеЕ®йГ®еПВжХ∞пЉМеїЇзЂЛдЇЖзФµеК®иљ¶жЬЇеЩ®дЇЇжОІеИґз≥їзїЯзЪДARXж®°еЮЛпЉЫжЬАеРОпЉМеП¶йЗЗж†ЈиОЈеПЦдЄАзїДжХ∞жНЃпЉМеѓєж®°еЮЛзЪДжЬЙжХИжАІињЫи°МдЇЖй™МиѓБпЉМдїОж®°еЮЛзЪДйҐДжµЛиЊУеЗЇеТМз≥їзїЯеЃЮйЩЕиЊУеЗЇзЪДжЛЯеРИжХИжЮЬжЭ•зЬЛпЉМиѓ•ж®°еЮЛзЪДжЬЙжХИжАІиГље§ЯиЊЊеИ∞и¶Бж±ВгАВ
еЇФзФ®ARXеїЇзЂЛзЪДз≥їзїЯж®°еЮЛдЄЇзЇњеЮЛж®°еЮЛпЉМеЬ®дЄАеЃЪз®ЛеЇ¶дЄКиГље§ЯеПНжШ†еЃЮйЩЕз≥їзїЯпЉМзФ®ињЩзІНжЦєж≥ХеїЇзЂЛж®°еЮЛзЪДињЗз®ЛжЙАйЬАжЧґйЧізЯ≠пЉМеУНеЇФењЂйАЯпЉЫзЉЇзВєжШѓж®°еЮЛз≤ЊеЇ¶дЄНе§ЯйЂШгАВиАМеЯЇдЇОMatlabз•ЮзїПзљСзїЬеїЇж®°еЊЧеИ∞зЪДж®°еЮЛпЉИйЭЮзЇњжАІж®°еЮЛпЉЙз≤ЊеЇ¶иЊГйЂШпЉМдљЖеУНеЇФзЪДжЧґйЧіињЬе§ІдЇОеЯЇдЇОARXж®°еЮЛзЪДз≥їзїЯиЊ®иѓЖпЉМеЫЊ6-1жШѓеИ©зФ®з•ЮзїПзљСзїЬдЄ≠зЪДBPзЃЧж≥ХйАЉињСеЗљжХ∞y=2cos(2x)+2exp(x)пЉМеПѓиІБйАЉињСжХИжЮЬйЭЮеЄЄзРЖжГ≥пЉМзФ±дЇОзѓЗеєЕжЬЙйЩРпЉМињЩйЗМдЄНеЖНеБЪињЗе§ЪзЪДиЃ®иЃЇгАВ
еЫЊ6-1 еИ©зФ®BPзЃЧж≥ХйАЉињСеЗљжХ∞y=2cos(2x)+2exp(x)
йАЪињЗеѓєз≥їзїЯиЊ®иѓЖдЄАдЇЫзЃАи¶Бж®°еЮЛзЪДиЃЊиЃ°дЄОдїњзЬЯпЉМжИСеК†жЈ±дЇЖеѓєз≥їзїЯиЊ®иѓЖзЫЄеЕ≥зЯ•иѓЖзЪДзРЖиІ£пЉМдїОдЄ≠е≠¶еИ∞дЇЖеЊИе§ЪеїЇж®°дЄОиЊ®иѓЖзЪДзЯ•иѓЖпЉМеИЭж≠•жОМжП°дЇЖз≥їзїЯиЊ®иѓЖеЈ•еЕЈзЃ±зЪДдљњзФ®жЦєж≥ХпЉМеѓєMatlabзЉЦз®Лиѓ≠и®АжЬЙдЇЖињЫдЄАж≠•зЪДиЃ§иѓЖпЉМзЉЦз®ЛиГљеКЫдєЯжЬЙжЙАжПРйЂШгАВеЬ®ињЩжђ°иЃЊиЃ°дЄ≠зФ±дЇОзЉЇе∞СзЬЯеЃЮзЪДеЃЮйЩЕз≥їзїЯпЉМиЃЊиЃ°дЄОдїњзЬЯзЪДзїУжЮЬињШе≠ШеЬ®дЄАдЇЫзЉЇйЩЈпЉМињШжЬЫиАБеЄИзїЩдЇИжЙєиѓДеТМжМЗж≠£гАВжЬАеРОжДЯи∞ҐдїїиАБеЄИдЄАдЄ™е≠¶жЬЯжЭ•зЪДжВЙењГжМЗеѓЉпЉМжДЯи∞Ґз®ЛиіЭиіЭе≠¶еІРеѓєжИСзЪДжЧ†зІБеЄЃеК©пЉМжДЯи∞Ґи•њеЃЙдЇ§е§ІжЭОдЉЯеРМе≠¶гАБи•њеЃЙзФµе≠РзІСе§ІдЄ•йєПжґЫеРМе≠¶гАБжИРйГљзФµе≠РзІСе§ІеВ®зЂ•жЭЊеРМе≠¶жПРдЊЫзЪДеЃЭиіµиµДжЦЩгАВ
еПВиАГжЦЗзМЃ
[1] еИШеЃПжЙН.з≥їзїЯиЊ®иѓЖдЄОеПВжХ∞дЉ∞иЃ°[M]пЉМеМЧдЇђ:еЖґйЗСеЈ•дЄЪеЗЇзЙИз§ЊпЉМ1994
[2] йљРжЩУжЕІпЉМзФ∞еЇЖж∞СпЉМиС£жµЈзСЮ.еЯЇдЇОMatlabз≥їзїЯиЊ®иѓЖеЈ•еЕЈзЃ±зЪДз≥їзїЯеїЇж®°.еЕµеЈ•иЗ™еК®еМЦ[J]пЉМ2006пЉМVol25пЉМNo.10
[3] жљШзЂЛзЩїпЉМжљШдї∞дЄЬ.з≥їзїЯиЊ®иѓЖдЄОеїЇж®°[M]пЉМеМЧдЇђпЉЪеМЦе≠¶еЈ•дЄЪеЗЇзЙИз§ЊпЉМ2004
[4] зОЛзІАе≥∞пЉМеНҐж°ВзЂ†.з≥їзїЯеїЇж®°дЄОиЊ®иѓЖ[M]пЉМеМЧдЇђпЉЪзФµе≠РеЈ•дЄЪеЗЇзЙИз§ЊпЉМ2004
йЩДпЉЪз®ЛеЇП
data1=[1653 -8 1656 -8 1656 -3 1656 -2 1656 5 1656 -8 1656 -7 1646 -3 1675 -1 1714 -8 1769 -6 1827 4 1875 -1 1930 0 1972 -7 2004 -5 2014 -6 2020 -5 2020 -3 2020 -3 2027 -3 2036 -6 2039 -7 2039 -5 2020 -11 2001 -15 1962 -14 1917 -12 1865 -12 1814 -9 1778 -15 1743 -13 1733 -11 1720 -3 1730 -7 1756 -4 1791 6 1846 4 1904 2 1969 5 2023 0 2065 -5 2078 -7 2075 -3 2068 -8 2062 -5 2052 -5 2043 -3 2039 -6 2030 -8 2020 -11 1988 -15 1933 -12 1869 -16 1817 -14 1769 -8 1746 -8 1727 -7 1727 -9 1730 -7 1740 -7 1743 -5 1746 -5 1759 9 1782 -12 1798 -11 1814 -4 1820 -4 1827 -5 1846 -1 1865 0 1894 -2 1927 0 1956 -4 1985 -3 2001 -4 2014 -3 2004 -10 1988 -10 1952 -14 1891 -15 1827 -19 1759 -12 1698 -10 1659 -9 1640 -7 1630 -6 1627 -15 1617 -11 1617 -3 1624 -2 1640 -6 1656 -21 6850 1 7241 1 1775 6 1836 4 1907 -1 1975 -3 2027 -5 2068 -2 2097 -3 2120 2 2146 -3 2159 0 2172 -15 2162 -10 2136 -17 2097 -13 2046 -14 1998 -11 1956 -10 1920 -9 1901 -13 1865 -13 1840 -7 1801 -9 1772 -9 1756 8 1766 -3 1785 -4 1824 -2 1872 3 1911 -1 1959 -1 1994 -1 2017 -5 2027 -8 2036 -1 2030 -6 2023 -5 2023 -5 2023 -4 2020 -5 2020 -8 2004 -12 1978 -14 1940 -8 1885 -10 1856 -8 1824 -9 1807 -10 1798 -13 1778 -13 1753 -11 1720 -15 1701 -11 1682 -13 1679 -3 1691 0];
u1=data1(1:2:299);
y1=data1(2:2:300);
u1=u1 ;
y1=y1 ;
bicycle1=iddata(y1,u1,1/15);
bicycle1.inputname= й©±еК®зФµеОЛ ;
bicyclel.outputname= иљ¶дљУеАЊиІТ ;
ze1=bicycle1(1:75);
figure,plot(ze1(1:75))
ze1=dtrend(ze1);
figure,plot(ze1(1:75))%figure,plot(ze1(50:200))
NN=struc(1:10,1:10,1:10); %зФЯжИРе§ЪдЄ™ж®°еЮЛзїУжЮДеПВжХ∞
V=arxstruc(bicycle1(1:100),bicycle1(50:150),NN); %иЃ°зЃЧе§ЪдЄ™еНХARXж®°еЮЛзЪДжНЯ姱еЗљжХ∞
nn=selstruc(V, aic ); %з°ЃеЃЪйШґжђ°пЉМйАЙжЛ©ж®°еЮЛзїУжЮД
M=arx(ze1,[2,1,4]); %з°ЃеЃЪARXж®°еЮЛеПВжХ∞
data2=[1724 0 1772 -2 1824 -2 1865 -2 1894 -5 1907 -3 1923 -1 1949 1 1981 -2 2017 -3 2049 -2 2062 -6 2062 -8 2059 -6 2043 -5 2023 -14 2001 -10 1975 -7 1949 -11 1923 -13 1904 -14 1885 -17 1856 -14 1827 -15 1804 -11 1782 -11 1775 -8 1785 -5 1817 9 1859 4 1901 0 1946 -3 1991 0 2030 -2 2065 -3 2088 -3 2104 -7 2104 -8 2094 -8 2081 -6 2068 -10 2049 -4 2027 -5 1994 -10 1956 -15 1901 -15 1836 -19 1766 -19 1691 -14 1646 -8 1627 -3 1627 -9 1624 -13 1608 -7 1588 7 1575 -8 1575 -13 1579 -7 1585 -2 1617 7 1688 10 1778 5 1878 0 1956 -2 2010 -2 2052 3 2085 -3 2110 0 2120 -12 2104 -7 2081 -9 2052 -7 2023 -10 1988 -7 1956 -13 1917 -21 1865 -17 1804 -21 1727 -16 1662 -10 1630 -4 1627 -14 1640 -6 1672 12 1727 7 1791 4 1856 -5 1898 -8 1907 -8 1911 -6 1904 -1 1917 -3 1927 -8 1940 -3 1962 0 1988 0 2023 0 2052 -3 2075 -6 2085 -5 2085 -7 2078 -8 2059 -7 2033 -11 2014 -13 1975 -16 1930 -18 1869 -20 1804 -18 1743 -13 1695 -10 1666 -2 1666 -14 1675 -21 1701 -4 1749 2 1811 0 1865 -3 1907 -2 1936 -6 1956 0 1972 2 1988 -1 2014 -3 2033 -4 2039 -4 2043 -5 2039 -7 2030 -4 2017 -9 1998 -9 1972 -10 1943 -15 1904 -17 1856 -19 1788 -13 1724 -11 1679 -9 1659 -6 1662 -3 1675 -5 1698 -1 1737 13 1778 1 1824 -3 1869 0 1923 -1 1959 -3 1985 -5 2001 -4];
u2=data2(1:2:299);
y2=data2(2:2:300);
u2=u2 ;
y2=y2 ;
bicycle2=iddata(y2,u2,1/15);
bicycle2.inputname= й©±еК®зФµеОЛ ;
bicycle2.outputname= иљ¶дљУеАЊиІТ ;
ze2=bicycle2(1:150);%ze2=bicycle2(1:150);
ze2=dtrend(ze2);
figure,plot(ze2(1:150))
figure,compare(ze2,M);
figure,resid(M,ze2);
ze=bicycle1(1:100);
%TimedomainPlot
th=arx(ze,nn);
th=sett(th,0.08);
u=z(:,2);
y=z(:,1)+ave;
yp=idsim(u,th)+ave;
xlb1= TimeStePs ;
subplot(2,1,1);
index=1:trn_data_n;
plot(index,y(index),index,yp(index), . );
rmse=norm(y(index)-yp(index))/sqrt(length(index));
title([ (a) Training Data (Solid Line) and ARX Prediction (Dots) with RMSE=
num2str(rmse)]);
disp([ [na nb dгАН=
num2str(nn)]);
xlabel(xlbl);
subplot(2,l,2);
index=(trn_data_n+1):(total_data_n);
plot(index,y(index),index,yp(index), . );
rmse=norm(y(index)-yp(index))/sqrt(length(index));
title([ (b) Checking Data (Solid Line) and ARX Prediction (Dots) with RMSE=
num2str(rmse)]);
xlabel(x1b1);
еЕНиі£е£∞жШО/зЙИжЭГзФ≥жШО Passiontech
жЙАжЬЙжЦЗзЂ†дЄЇзљСдЄКжРЬйЫЖжИЦзІБдЄЛдЇ§жµБе≠¶дє†дєЛзФ®пЉМдїїдљХжґЙеПКеХЖдЄЪзЫИеИ©зЫЃзЪДеЭЗдЄНеЊЧдљњзФ®пЉМеР¶еИЩдЇІзФЯзЪДдЄАеИЗеРОжЮЬзФ±жВ®иЗ™еЈ±жЙњжЛЕ!
жЬђзЂЩдїЕдїЕжПРдЊЫдЄАдЄ™иІВжС©е≠¶дє†зЪДзОѓеҐГпЉМе∞ЖдЄНеѓєдїїдљХиµДжЇРиіЯж≥ХеЊЛиі£дїїгАВжЙАжЬЙиµДжЇРиѓЈеЬ®дЄЛиљљеРО24е∞ПжЧґеЖЕеИ†йЩ§гАВ
иЛ•жЧ†жДПдЄ≠дЊµзКѓеИ∞жВ®зЪДзЙИжЭГеИ©зЫКпЉМиѓЈжЭ•дњ°иБФз≥їжИСдїђпЉМжИСдїђдЉЪеЬ®жФґеИ∞дњ°жБѓдЄЙ姩еЖЕзїЩдЇИе§ДзРЖ!
 жФґиЧПзБµзМЂзљС
жФґиЧПзБµзМЂзљС




