1 еј•иЁҖ
canпјҲcontroller area networkпјүеҚіжҺ§еҲ¶еҷЁеұҖеҹҹзҪ‘з»ңпјҢжңҖеҲқжҳҜз”ұеҫ·еӣҪboschе…¬еҸёдёәи§ЈеҶіжұҪиҪҰзӣ‘жҺ§зі»з»ҹдёӯзҡ„иҮӘеҠЁеҢ–зі»з»ҹйӣҶжҲҗиҖҢи®ҫи®Ўзҡ„ж•°еӯ—дҝЎеҸ·йҖҡдҝЎеҚҸи®®пјҢеұһдәҺжҖ»зәҝејҸдёІиЎҢйҖҡдҝЎзҪ‘з»ңгҖӮз”ұдәҺcanжҖ»зәҝиҮӘиә«зҡ„зү№зӮ№пјҢе…¶еә”з”ЁйўҶеҹҹз”ұжұҪиҪҰиЎҢдёҡжү©еұ•еҲ°иҝҮзЁӢжҺ§еҲ¶гҖҒжңәжў°еҲ¶йҖ гҖҒжңәеҷЁдәәе’ҢжҘје®ҮиҮӘеҠЁеҢ–зӯүйўҶеҹҹпјҢиў«е…¬и®ӨдёәжңҖжңүеҸ‘еұ•еүҚжҷҜзҡ„зҺ°еңәжҖ»зәҝд№ӢдёҖгҖӮ
canжҖ»зәҝзі»з»ҹзҪ‘з»ңжӢ“жү‘з»“жһ„йҮҮз”ЁжҖ»зәҝејҸз»“жһ„пјҢе…¶з»“жһ„з®ҖеҚ•гҖҒжҲҗжң¬дҪҺпјҢ并且йҮҮз”Ёж— жәҗжҠҪеӨҙиҝһжҺҘпјҢзі»з»ҹеҸҜйқ жҖ§й«ҳгҖӮжң¬и®ҫи®ЎеңЁдҝқиҜҒзі»з»ҹеҸҜйқ е·ҘдҪңе’ҢйҷҚдҪҺжҲҗжң¬зҡ„жқЎд»¶дёӢпјҢе…·жңүйҖҡз”ЁжҖ§гҖҒе®һж—¶жҖ§е’ҢеҸҜжү©еұ•жҖ§зӯүжҢҒзӮ№гҖӮ
2 зі»з»ҹжҖ»дҪ“ж–№жЎҲи®ҫи®Ў
ж•ҙдёӘcanзҪ‘з»ңз”ұдёҠдҪҚжңәпјҲдёҠдҪҚжңәд№ҹжҳҜзҪ‘з»ңиҠӮзӮ№пјүе’Ңеҗ„зҪ‘з»ңиҠӮзӮ№з»„жҲҗпјҲи§Ғеӣҫ1пјүгҖӮдёҠдҪҚжңәйҮҮз”Ёе·ҘжҺ§жңәжҲ–йҖҡз”Ёи®Ўз®—жңәпјҢе®ғдёҚд»…еҸҜд»ҘдҪҝз”Ёжҷ®йҖҡpcжңәзҡ„дё°еҜҢиҪҜ件пјҢиҖҢдё”йҮҮз”ЁдәҶи®ёеӨҡдҝқжҠӨжҺӘж–ҪпјҢдҝқиҜҒдәҶе®үе…ЁеҸҜйқ зҡ„иҝҗиЎҢпјҢе·ҘжҺ§жңәзү№еҲ«йҖӮеҗҲдәҺе·ҘдёҡжҺ§еҲ¶зҺҜеўғжҒ¶еҠЈжқЎд»¶дёӢзҡ„дҪҝз”ЁгҖӮдёҠдҪҚжңәйҖҡиҝҮcanжҖ»зәҝйҖӮй…ҚеҚЎдёҺеҗ„зҪ‘з»ңиҠӮзӮ№иҝӣиЎҢдҝЎжҒҜдәӨжҚўпјҢиҙҹиҙЈеҜ№ж•ҙдёӘзі»з»ҹиҝӣиЎҢзӣ‘жҺ§е’Ңз»ҷдёӢдҪҚжңәеҸ‘йҖҒеҗ„з§Қж“ҚдҪңжҺ§еҲ¶е‘Ҫд»Өе’Ңи®ҫе®ҡеҸӮж•°гҖӮ
зҪ‘з»ңиҠӮзӮ№з”ұдј ж„ҹеҷЁжҺҘеҸЈгҖҒдёӢдҪҚжңәгҖҒcanжҺ§еҲ¶еҷЁе’Ңcan收еҸ‘еҷЁз»„жҲҗпјҢйҖҡиҝҮcan收еҸ‘еҷЁдёҺжҖ»зәҝзӣёиҝһпјҢжҺҘ收дёҠдҪҚжңәзҡ„и®ҫзҪ®е’Ңе‘Ҫд»ӨгҖӮдј ж„ҹеҷЁжҺҘеҸЈжҠҠйҮҮйӣҶеҲ°зҡ„зҺ°еңәдҝЎеҸ·з»ҸиҝҮзҪ‘з»ңиҠӮзӮ№еӨ„зҗҶеҗҺпјҢз”ұcan收еҸ‘еҷЁз»Ҹз”ұcanжҖ»зәҝдёҺдёҠдҪҚжңәиҝӣиЎҢж•°жҚ®дәӨжҚўпјҢдёҠдҪҚжңәеҜ№дј ж„ҹеҷЁжЈҖжөӢеҲ°зҡ„зҺ°еңәдҝЎеҸ·еҒҡиҝӣдёҖжӯҘеҲҶжһҗгҖҒеӨ„зҗҶжҲ–еӯҳеӮЁпјҢе®ҢжҲҗзі»з»ҹзҡ„еңЁзәҝжЈҖжөӢпјҢи®Ўз®—жңәеҲҶжһҗдёҺжҺ§еҲ¶гҖӮжң¬и®ҫи®ЎcanжҖ»зәҝдј иҫ“д»ӢиҙЁйҮҮз”ЁеҸҢз»һзәҝгҖӮ
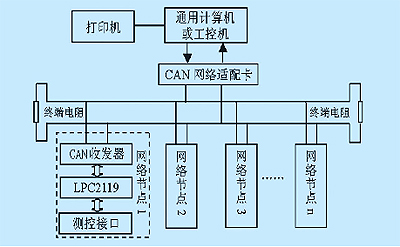
еӣҫ 1 canжҖ»зәҝзҪ‘з»ңзі»з»ҹз»“жһ„
3 canжҖ»зәҝжҷәиғҪзҪ‘з»ңиҠӮзӮ№зЎ¬д»¶и®ҫи®Ў
жң¬ж–Үз»ҷеҮәд»Ҙarm7tdmiеҶ…ж ёphilipsе…¬еҸёзҡ„lpc2119иҠҜзүҮдҪңдёәж ёеҝғжһ„жҲҗзҡ„жҷәиғҪиҠӮзӮ№з”өи·Ҝи®ҫи®ЎгҖӮиҜҘжҷәиғҪиҠӮзӮ№зҡ„з”өи·ҜеҺҹзҗҶеӣҫеҰӮеӣҫ2жүҖзӨәгҖӮиҜҘжҷәиғҪиҠӮзӮ№зҡ„и®ҫи®ЎеңЁдҝқиҜҒзі»з»ҹеҸҜйқ е·ҘдҪңе’ҢйҷҚдҪҺжҲҗжң¬зҡ„жқЎд»¶дёӢпјҢе…·жңүйҖҡз”ЁжҖ§гҖҒе®һж—¶жҖ§е’ҢеҸҜжү©еұ•жҖ§зӯүзү№зӮ№пјҢдёӢйқўеҲҶеҲ«еҜ№з”өи·Ҝзҡ„еҗ„йғЁеҲҶеҒҡиҝӣдёҖжӯҘзҡ„иҜҙжҳҺгҖӮ
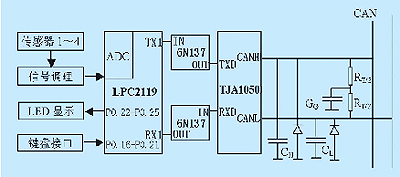
еӣҫ2 canжҖ»зәҝжҷәиғҪзҪ‘з»ңзӮ№
3.1 lpc2119еӨ„зҗҶеҷЁзү№зӮ№
lpc2119жҳҜphilipsе…¬еҸёжҺЁеҮәзҡ„дёҖж¬ҫй«ҳжҖ§д»·жҜ”еҫҲеӨ„зҗҶеҷЁгҖӮlpc2119жҳҜеҹәдәҺдёҖдёӘж”ҜжҢҒе®һж—¶д»ҝзңҹе’Ңи·ҹиёӘзҡ„16/32дҪҚarm7tdmi-stm cpuпјҢ并еёҰжңү128kbеөҢе…Ҙзҡ„й«ҳйҖҹflashеӯҳеӮЁеҷЁгҖӮзӢ¬зү№зҡ„еҠ йҖҹз»“жһ„дҪҝ32дҪҚд»Јз ҒиғҪеӨҹеңЁжңҖеӨ§ж—¶й’ҹйҖҹзҺҮдёӢиҝҗиЎҢпјҢеҜ№д»Јз Ғ规模жңүдёҘж јжҺ§еҲ¶зҡ„еә”з”ЁеҸҜдҪҝз”Ё16дҪҚthumbжЁЎејҸе°Ҷд»Јз Ғ规模йҷҚдҪҺи¶…иҝҮ30%пјҢиҖҢжҖ§иғҪзҡ„жҚҹеӨұеҚҙеҫҲе°ҸгҖӮе®һиЎҢжөҒж°ҙзәҝдҪңдёҡпјҢжҸҗдҫӣembedded iceйҖ»иҫ‘пјҢж”ҜжҢҒзүҮдёҠж–ӯзӮ№е’Ңи°ғиҜ•зӮ№пјҢе…·жңүе…Ҳиҝӣзҡ„иҪҜ件ејҖеҸ‘е’Ңи°ғиҜ•зҺҜеўғгҖӮ
lpc2119е…·жңүйқһеёёе°Ҹзҡ„64и„ҡе°ҒиЈ…гҖҒжһҒдҪҺзҡ„еҠҹиҖ—гҖҒеӨҡдёӘ32дҪҚе®ҡж—¶еҷЁгҖҒ4и·Ҝ10дҪҚadcгҖҒ2и·ҜcanгҖҒpwmйҖҡйҒ“гҖҒеӨҡдёӘдёІиЎҢжҺҘеҸЈпјҢеҢ…жӢ¬2дёӘ16c550е·Ҙдёҡж ҮеҮҶuartгҖҒй«ҳйҖҹi2cжҺҘеҸЈпјҲ400 khzпјүе’Ң2дёӘspiжҺҘеҸЈпјҢ46дёӘgpioд»ҘеҸҠеӨҡиҫҫ9дёӘеӨ–йғЁдёӯж–ӯдҪҝе®ғ们зү№еҲ«йҖӮз”ЁдәҺжұҪиҪҰгҖҒе·ҘдёҡжҺ§еҲ¶еә”з”Ёд»ҘеҸҠеҢ»з–—зі»з»ҹе’Ңе®№й”ҷз»ҙжҠӨжҖ»зәҝгҖӮ
lpc2119еҶ…йғЁйӣҶжҲҗ2дёӘcanжҺ§еҲ¶еҷЁпјҢжҜҸдёҖдёӘcanжҺ§еҲ¶еҷЁйғҪдёҺзӢ¬з«ӢcanжҺ§еҲ¶еҷЁsja1000жңүзқҖзӣёдјјзҡ„еҜ„еӯҳеҷЁз»“жһ„гҖӮе…¶дё»иҰҒзҡ„еҢәеҲ«еңЁдәҺж ҮиҜҶз¬ҰжҺҘ收иҝҮж»Өзҡ„зј–зЁӢж“ҚдҪңдёҠпјҢзҜҮе№…жңүйҷҗиҝҷйҮҢдёҚдҪңиҜҰиҝ°гҖӮе®ғзҡ„дё»иҰҒзү№жҖ§жңү:еҚ•дёӘжҖ»зәҝдёҠзҡ„ж•°жҚ®дј иҫ“йҖҹзҺҮй«ҳиҫҫ1mb/s;32дҪҚеҜ„еӯҳеҷЁе’Ңramи®ҝй—®;е…је®№can2.0bпјҢiso11898-1规иҢғ;е…ЁеұҖйӘҢ收ж»ӨжіўеҷЁеҸҜд»ҘиҜҶеҲ«жүҖжңүзҡ„11дҪҚе’Ң29дҪҚж ҮиҜҶз¬Ұ;йӘҢ收ж»ӨжіўеҷЁдёәйҖүжӢ©зҡ„ж ҮеҮҶж ҮиҜҶз¬ҰжҸҗдҫӣfull can-styleиҮӘеҠЁжҺҘ收гҖӮ
3.2 ж•°жҚ®йҮҮйӣҶе’ҢдәәжңәжҺҘеҸЈ
дј ж„ҹеҷЁжҺҘеҸЈзҡ„йҖүз”Ёеә”ж №жҚ®е®һйҷ…зі»з»ҹжүҖиҰҒе®һзҺ°зҡ„еҠҹиғҪиҖҢе®ҡпјҢз”ұдј ж„ҹеҷЁе°Ҷиў«жөӢйҮҸиҪ¬еҢ–жҲҗз”өйҮҸгҖӮз”ұдәҺжөӢиҜ•зҺҜеўғзҡ„з”өзЈҒе№Іжү°гҖҒдј ж„ҹеҷЁе’Ңж”ҫеӨ§еҷЁиҮӘиә«зҡ„еҪұе“ҚпјҢеҫҖеҫҖдҪҝдҝЎеҸ·дёӯеҗ«жңүеӨҡз§Қйў‘зҺҮжҲҗеҲҶзҡ„еҷӘйҹіпјҢзӣҙжҺҘд»Һдј ж„ҹеҷЁиҫ“еҮәзҡ„дҝЎеҸ·йңҖиҰҒз»ҸиҝҮдҝЎеҸ·и°ғзҗҶз”өи·ҜдҪңиҝӣдёҖжӯҘзҡ„еӨ„зҗҶжүҚиғҪдҪҝеҗҺз»ӯз”өи·Ҝеҫ—д»ҘжӯЈеёёе·ҘдҪңгҖӮз»ҸиҝҮи°ғзҗҶеҗҺзҡ„дҝЎеҸ·иҫ“е…ҘеҲ°lpc2119зҡ„жЁЎжӢҹдҝЎеҸ·иҫ“е…Ҙз«Ҝp0.27-p0.30пјҢlpc2119еҶ…жңү4и·Ҝ10дҪҚadcпјҢиҪ¬жҚўж—¶й—ҙдҪҺиҮі2.44ОјsгҖӮ
дәәжңәжҺҘеҸЈеҲ©з”Ёlpc2119дё°еҜҢзҡ„gpioжҺҘеҸЈйҮҮз”ЁledжҳҫзӨәиҫ“еҮәе’Ңй”®зӣҳиҫ“е…ҘпјҢеҰӮеӣҫ2жүҖзӨәгҖӮжң¬и®ҫи®ЎйҮҮз”Ё4дёӘledеҲҶеҲ«иЎЁзӨәиҠӮзӮ№з”өжәҗгҖҒж•°жҚ®йҖҡдҝЎзҠ¶жҖҒгҖҒиҒ”жңәжҢҮзӨәе’Ңй”ҷиҜҜжҢҮзӨәгҖӮй”®зӣҳи®ҫи®ЎдәҶ6дёӘжҢүй”®з”ЁжқҘи®ҫзҪ®иҠӮзӮ№зҡ„жҠҘж–Үж»ӨжіўгҖҒиҠӮзӮ№зҡ„жіўзү№зҺҮеҸҠиҠӮзӮ№еӨҚдҪҚзӯүеҠҹиғҪгҖӮ
3.3 canжҖ»зәҝжҺҘеҸЈ
ж №жҚ®еӣҫ2жүҖзӨәпјҢcanжҺҘеҸЈйғЁеҲҶеҢ…жӢ¬lpc2119пјҲеҶ…зҪ®canжҺ§еҲ¶еҷЁпјүгҖҒе…үз”өиҖҰеҗҲеҷЁе’ҢжҖ»зәҝ收еҸ‘еҷЁгҖӮcanжҖ»зәҝйҒөеҫӘisoзҡ„ж ҮеҮҶжЁЎеһӢпјҢеҲҶдёәж•°жҚ®й“ҫи·ҜеұӮе’Ңзү©зҗҶеұӮгҖӮеңЁе·ҘзЁӢдёҠйҖҡеёёз”ұcanжҺ§еҲ¶еҷЁе’Ң收еҸ‘еҷЁжқҘе®һзҺ°гҖӮ收еҸ‘еҷЁйҖүжӢ©philipsе…¬еҸёзҡ„tja1050й«ҳйҖҹ收еҸ‘еҷЁпјҢе®ғз¬ҰеҗҲiso11898ж ҮеҮҶгҖӮcanжҺ§еҲ¶еҷЁдё»иҰҒе®ҢжҲҗcanзҡ„йҖҡи®ҜеҚҸи®®пјҢе®һзҺ°жҠҘж–Үзҡ„иЈ…й…Қе’ҢжӢҶеҲҶгҖҒжҺҘ收дҝЎжҒҜзҡ„иҝҮж»Өе’Ңж ЎйӘҢзӯүгҖӮ收еҸ‘еҷЁtja1050еҲҷжҳҜе®һзҺ°canжҺ§еҲ¶еҷЁе’ҢйҖҡи®Ҝзәҝи·Ҝзҡ„зү©зҗҶиҝһжҺҘпјҢжҸҗй«ҳcanжҖ»зәҝзҡ„й©ұеҠЁиғҪеҠӣе’ҢеҸҜйқ жҖ§гҖӮ
дёәдәҶиҝӣдёҖжӯҘжҸҗй«ҳзі»з»ҹзҡ„жҠ—е№Іжү°иғҪеҠӣпјҢlpc2119еј•и„ҡtx1гҖҒrx1дёҺ收еҸ‘еҷЁtja1050并дёҚжҳҜзӣҙжҺҘзӣёиҝһзҡ„пјҢиҖҢжҳҜйҖҡиҝҮй«ҳйҖҹе…үиҖҰ6n137еҗҺдёҺtja1050зӣёиҝһгҖӮз”өи·ҜдёӯеҸҜйҮҮз”Ёйҡ”зҰ»еһӢdc/dc жЁЎеқ—еҗ‘收еҸ‘еҷЁз”өи·Ҝдҫӣз”өгҖӮdc/dcжЁЎеқ—йҮҮз”ЁйҮ‘еҚҮйҳізҡ„b0505s-1wе®ҡз”өеҺӢиҫ“е…Ҙйҡ”зҰ»йқһзЁіеҺӢеҚ•иҫ“еҮәеһӢdc/dcжЁЎеқ—пјҢйҡ”зҰ»з”өеҺӢвүҘ1000vdcгҖӮиҝҷж ·е°ұеҸҜд»ҘеҫҲеҘҪең°е®һзҺ°жҖ»зәҝдёҠеҗ„жҺҘзӮ№зҡ„з”өж°”йҡ”зҰ»пјҢиҝҷйғЁеҲҶз”өи·ҜиҷҪеўһеҠ дәҶеӨҚжқӮжҖ§пјҢдҪҶеҚҙдҝқиҜҒдәҶзЁіе®ҡжҖ§е’Ңе®үе…ЁжҖ§гҖӮ
tja1050дёҺcanжҖ»зәҝзҡ„жҺҘеҸЈйғЁеҲҶд№ҹйҮҮз”ЁдәҶдёҖе®ҡзҡ„е®үе…Ёе’ҢжҠ—е№Іжү°жҺӘж–ҪпјҢcanhе’ҢcanlдёҺең°д№Ӣй—ҙ并иҒ”дәҶдёӨдёӘе°Ҹз”өе®№chе’ҢclеҸҜд»Ҙиө·еҲ°ж»ӨйҷӨжҖ»зәҝдёҠзҡ„й«ҳйў‘е№Іжү°е’ҢдёҖе®ҡзҡ„йҳІз”өзЈҒиҫҗе°„зҡ„иғҪеҠӣгҖӮз”өе®№еҖјйЎ»з”ұиҠӮзӮ№зҡ„ж•°йҮҸе’Ңжіўзү№зҺҮеҶіе®ҡпјҢеҪ“tja1050 зҡ„иҫ“еҮәзә§йҳ»жҠ—еӨ§зәҰжҳҜ20ПүпјҢжҖ»зәҝзі»з»ҹжңү10дёӘиҠӮзӮ№йҖҹеәҰжҳҜ500kbpsпјҢеҲҷз”өе®№зҡ„еҖјдёҚеә”иҜҘи¶…иҝҮ470pfгҖӮеҸҰеӨ–еңЁдёӨж №canжҖ»зәҝжҺҘе…Ҙз«ҜдёҺең°д№Ӣй—ҙеҲҶеҲ«еҸҚжҺҘдәҶдёҖдёӘдҝқжҠӨдәҢжһҒз®ЎпјҢеҪ“can жҖ»зәҝжңүиҫғй«ҳзҡ„иҙҹз”өеҺӢж—¶йҖҡиҝҮдәҢжһҒз®Ўзҡ„зҹӯи·ҜеҸҜиө·еҲ°дёҖе®ҡзҡ„иҝҮеҺӢдҝқжҠӨдҪңз”ЁгҖӮж №жҚ®tja1050зҡ„зү№жҖ§пјҢжң¬и®ҫи®Ўдёӯcanз»Ҳз«Ҝз”өйҳ»дҪҝз”ЁдәҶеҲҶиЈӮз»Ҳз«ҜпјҢеҚіжҖ»зәҝз«ҜиҠӮзӮ№зҡ„дёӨдёӘз»Ҳз«Ҝз”өйҳ»йғҪиў«еҲҶжҲҗдёӨдёӘзӯүеҖјзҡ„з”өйҳ»пјҢз”ЁдёӨдёӘ60Пүзҡ„з”өйҳ»д»ЈжӣҝдёҖдёӘ120Пүзҡ„з”өйҳ»,иҝҷж ·еҸҜд»Ҙжңүж•Ҳзҡ„еҮҸе°‘иҫҗе°„гҖӮз”ұдәҺдҪҝз”ЁдәҶеҲҶиЈӮз»Ҳз«ҜпјҢtja1050зҡ„emcжҖ§иғҪеҫ—еҲ°дјҳеҢ–иҖҢдё”дёҚдјҡдә§з”ҹжүјжөҒгҖӮ
4 canжҖ»зәҝеә”з”ЁеұӮйҖҡдҝЎеҚҸи®®зҡ„еҲ¶е®ҡ
canжҖ»зәҝеә”з”ЁеұӮеҚҸи®®еҲ¶е®ҡзҡ„жҖ»дҪ“зӣ®ж ҮжҳҜжңҖеӨ§йҷҗеәҰең°еҸ‘жҢҘcanжҖ»зәҝзҡ„дјҳејӮжҖ§иғҪпјҢдҪҝйҖҡдҝЎжӣҙеҠ 规иҢғгҖҒеҸҜйқ пјҢжҸҗй«ҳе®һж—¶жҖ§пјҢйҷҚдҪҺжҖ»зәҝиҙҹиҪҪзҺҮгҖӮеңЁи®ҫи®Ўзі»з»ҹзҡ„еә”з”ЁеұӮйҖҡдҝЎеҚҸи®®ж—¶пјҢйңҖиҰҒиҖғиҷ‘д»ҘдёӢдёӨдёӘж–№йқўзҡ„еҶ…е®№:
пјҲ1пјү з»“еҗҲзі»з»ҹзҡ„и®ҫи®ЎиҰҒжұӮпјҢеҲҶжһҗйҖҡдҝЎдёӯжүҖжңүдҝЎжҒҜеҜ№иұЎпјҢзЎ®е®ҡйңҖиҰҒж”ҜжҢҒзҡ„йҖҡдҝЎдј иҫ“жЁЎејҸ;
пјҲ2пјү зЎ®е®ҡж ҮиҜҶз¬Ұзҡ„еҲҶй…Қж–№жЎҲпјҢе®ҡд№үеё§ж јејҸгҖӮдёӢйқўеҲҶеҲ«и®Ёи®әд№ӢгҖӮ
4.1 зЎ®е®ҡйҖҡдҝЎзҡ„дј иҫ“жЁЎејҸ
жң¬зі»з»ҹиҰҒжұӮе®һзҺ°е№ҝж’ӯејҸйҖҡдҝЎз”ЁжқҘеҜ№е…ЁйғЁд»Һз»“зӮ№жҲ–йғЁеҲҶд»Һз»“зӮ№еҸ‘еёғдҝЎжҒҜпјҢеҗҢж—¶дё»з»“зӮ№иҝҳиҰҒе…·еӨҮиғҪеӨҹеҜ№еҚ•дёӘз»“зӮ№иҝӣиЎҢж“ҚдҪңзҡ„еҠҹиғҪгҖӮеӣ жӯӨе®ҡд№үд»ҘдёӢдёүз§Қдј иҫ“жЁЎејҸ:
пјҲ1пјү ж”ҜжҢҒе…ЁеұҖпјҸеұҖйғЁе№ҝж’ӯејҸйҖҡдҝЎгҖӮдё»з»“зӮ№еҗ‘е…ЁйғЁжҲ–йғЁеҲҶз»“зӮ№еҸ‘йҖҒдҝЎжҒҜпјҢд»Һз»“зӮ№жҺҘ收дҝЎжҒҜеҗҺиҝӣиЎҢзӣёеә”еҠЁдҪңпјҢдёҚеӣһйҖҒзЎ®и®ӨдҝЎжҒҜгҖӮ
пјҲ2пјү ж”ҜжҢҒзӮ№еҜ№зӮ№ејҸйҖҡдҝЎгҖӮдё»з»“зӮ№еҗ‘жҹҗдёӘд»Һз»“зӮ№еҸ‘йҖҒдҝЎжҒҜиҜ·жұӮж•°жҚ®пјҢд»Һз»“зӮ№жҺҘ收еҲ°иҜ·жұӮеҗҺиҜ»еҸ–ж•°жҚ®пјҢ并еҗ‘дё»з»“зӮ№еҸ‘йҖҒиҜ·жұӮзҡ„ж•°жҚ®гҖӮ
пјҲ3пјү ж”ҜжҢҒзӮ№еҜ№зӮ№ејҸйҖҡдҝЎгҖӮдё»з»“зӮ№еҗ‘жҹҗдёӘд»Һз»“зӮ№еҸ‘йҖҒдҝЎжҒҜпјҢд»Һз»“зӮ№жҺҘ收еҲ°дҝЎжҒҜеҗҺжү§иЎҢзӣёеә”ж“ҚдҪңпјҢдҪҶдёҚеӣһйҖҒзЎ®и®ӨдҝЎжҒҜгҖӮ
4.2 зЎ®е®ҡж ҮиҜҶз¬Ұзҡ„еҲҶй…Қж–№жЎҲ
зЎ®е®ҡж ҮиҜҶз¬Ұзҡ„еҲҶй…Қж–№жЎҲпјҢе®ҡд№үеё§ж јејҸгҖӮж ҮиҜҶз¬ҰжҳҜcanжҖ»зәҝе®һзҺ°д»ІиЈҒзҡ„дҫқжҚ®пјҢд№ҹжҳҜеҚҸи®®зҡ„е…ій”®пјҢе…¶еҲҶй…Қж–№жЎҲиҰҒж»Ўи¶ідёӘиҠӮзӮ№еҸҠдҝЎжҒҜеҜ№дјҳе…Ҳзә§зҡ„иҰҒжұӮгҖӮжң¬ж–ҮеңЁеҚҸи®®дёӯе®ҡд№үдәҶдёӨз§Қзұ»еһӢзҡ„её§:дҝЎжҒҜеё§е’Ңж•°жҚ®её§гҖӮдҝЎжҒҜеё§з”ЁжқҘдј йҖҒдё»з»“зӮ№еҜ№д»Һз»“зӮ№зҡ„е‘Ҫд»ӨгҖҒй…ҚзҪ®дҝЎжҒҜд»ҘеҸҠйҖҡдҝЎдёӯзҡ„иҝһжҺҘе“Қеә”дҝЎжҒҜзӯүгҖӮиҖҢд»Һз»“зӮ№еҗ‘дёҠдј йҖҒиҝҮзЁӢж•°жҚ®еҲҷйҖҡиҝҮж•°жҚ®её§жқҘе®һзҺ°гҖӮдҝЎжҒҜеё§зҡ„дјҳе…Ҳзә§й«ҳдәҺж•°жҚ®её§гҖӮ
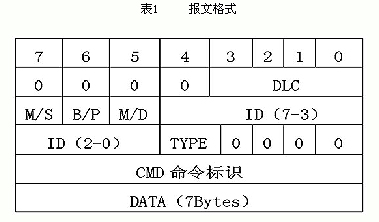
и®ҫи®ЎдёӯйҖҡдҝЎеҚҸи®®йҮҮз”Ёcan2.0aж ҮеҮҶеё§ж јејҸпјҢеҸӘз”Ёж•°жҚ®её§пјҢдёҚйҮҮз”ЁиҝңзЁӢеё§гҖӮжҠҘж–Үзҡ„ж јејҸеҰӮиЎЁ1жүҖзӨәгҖӮжң¬ж–ҮеҜ№11дҪҚidиҝӣиЎҢдәҶйҮҚж–°е®ҡд№үгҖӮdlcз”ЁдәҺиЎЁзӨәж•°жҚ®еҹҹзҡ„й•ҝеәҰ0пҪһ7дёӘеӯ—иҠӮ;m/sз”ЁдәҺиЎЁзӨәжҠҘж–Үзҡ„дј ж’ӯж–№еҗ‘пјҢ0иЎЁзӨәдё»з«ҷеҗ‘д»Һз«ҷеҸ‘ж¶ҲжҒҜпјҢ1иЎЁзӨәд»Һз«ҷеҗ‘дё»з«ҷеҸ‘ж¶ҲжҒҜ;b/pиЎЁзӨәйҖҡдҝЎж–№ејҸпјҢ0иЎЁзӨәе№ҝж’ӯејҸйҖҡдҝЎпјҢ1иЎЁзӨәзӮ№еҜ№зӮ№йҖҡдҝЎ;m/dиЎЁзӨәеё§зұ»еһӢпјҢ0иЎЁзӨәдҝЎжҒҜеё§пјҢ1иЎЁзӨәж•°жҚ®её§;idпјҲ7-0пјүз”ЁдәҺиЎЁзӨәжҠҘж–Үж ҮиҜҶз¬Ұ;typeз”ЁдәҺиЎЁзӨәжҠҘж–ҮжҳҜеҚ•её§жҠҘж–ҮиҝҳжҳҜеӨҡеё§жҠҘж–ҮпјҢиҜҘдҪҚдёә0ж—¶иЎЁзӨәеҚ•её§жҲ–з»“жқҹеё§пјҢиҜҘдҪҚдёә1ж—¶иЎЁзӨәеӨҡеё§жҠҘж–Ү;cmdиЎЁзӨәе‘Ҫд»Өж ҮиҜҶпјҢеҢ…жӢ¬:0aиЎЁзӨәдёҠдј е‘Ҫд»ӨпјҢ0bиЎЁзӨәдёӢиҪҪе‘Ҫд»ӨпјҢ0cиЎЁзӨәиҒ”жңәе‘Ҫд»ӨпјҢ0dиЎЁзӨәжҠҘиӯҰе‘Ҫд»Өзӯү;dataиЎЁзӨәж•°жҚ®еҹҹгҖӮ
еҪ“дёҠдҪҚжңәйңҖиҰҒдёҺеӯҗиҠӮзӮ№иҝӣиЎҢйҖҡдҝЎж—¶пјҢеҸҜз”Ёд»ҘдёҠдёүз§ҚжЁЎејҸеҗ‘canзҪ‘з»ңиҠӮзӮ№еҸ‘йҖҒдҝЎжҒҜеё§пјҢcanзҪ‘з»ңдёӯзҡ„иҠӮзӮ№жҺҘ收еҲ°дҝЎжҒҜеё§еҗҺпјҢйҖҡиҝҮеҲӨеҲ«ж ҮиҜҶз¬Ұе’Ңе‘Ҫд»Өж ҮиҜҶжқҘеҢәеҲ«дҝЎжҒҜеё§зҡ„зұ»еҲ«пјҢ并е°ҶиҠӮзӮ№жүҖйңҖиҰҒзҡ„ж•°жҚ®еҸ‘йҖҒеҮәеҺ»гҖӮеҪ“зҪ‘з»ңиҠӮзӮ№еҸ‘з”ҹзӘҒеҸ‘дәӢ件时пјҢеҸҜйҡҸж—¶еҗ‘дёҠдҪҚжңәжҠҘе‘ҠпјҢдёҠдҪҚжңәеҗҢж ·д№ҹжҳҜйҖҡиҝҮж ҮиҜҶз¬ҰжқҘиҜҶеҲ«ж•°жҚ®зұ»еһӢгҖӮ
5 з»“жқҹиҜӯ
жң¬ж–ҮеҹәдәҺcanжҖ»зәҝжҠҖжңҜпјҢд»Ҙlpc2119дёәж ёеҝғпјҢйҮҚзӮ№д»Ӣз»ҚдәҶзҪ‘з»ңиҠӮзӮ№зҡ„硬件з”өи·Ҝи®ҫи®Ўд»ҘеҸҠеә”з”ЁеұӮеҚҸи®®зҡ„еҲ¶е®ҡгҖӮиҪҜ件и®ҫи®ЎйғЁеҲҶпјҢеңЁkeil uvision3зҺҜеўғдёӢпјҢе®һзҺ°дәҶcanжҺ§еҲ¶еҷЁзҡ„й©ұеҠЁзЁӢеәҸе’Ңеә”з”ЁеұӮеҚҸи®®пјҢи§ЈеҶідәҶзҺ°еңәдј ж„ҹеҷЁеҫ—еҲ°зҡ„жөӢйҮҸдҝЎеҸ·еҲ©з”ЁдёӢдҪҚжңәиҝӣиЎҢеӨ„зҗҶе’ҢеӯҳеӮЁпјҢ然еҗҺйҖҡиҝҮеҶ…зҪ®canжҺ§еҲ¶еҷЁе°Ҷж•°жҚ®еҸ‘йҖҒеҲ°canжҖ»зәҝдёҠпјҢе®ҢжҲҗдёҺдёҠдҪҚжңәзҡ„йҖҡи®ҜгҖӮи®ҫи®Ўе…·жңүйҖҡз”ЁжҖ§пјҢе®һж—¶жҖ§пјҢеҸҜжү©еұ•жҖ§ејәзҡ„зү№зӮ№пјҢзҺ°е·ІйҖҡиҝҮи°ғиҜ•пјҢжҖ§иғҪзЁіе®ҡпјҢеҸҜд»Ҙ移жӨҚеҲ°е…¶д»–зі»з»ҹдёӯгҖӮ
е…ҚиҙЈеЈ°жҳҺ/зүҲжқғз”іжҳҺ Passiontech
жүҖжңүж–Үз« дёәзҪ‘дёҠжҗңйӣҶжҲ–з§ҒдёӢдәӨжөҒеӯҰд№ д№Ӣз”ЁпјҢд»»дҪ•ж¶үеҸҠе•ҶдёҡзӣҲеҲ©зӣ®зҡ„еқҮдёҚеҫ—дҪҝз”ЁпјҢеҗҰеҲҷдә§з”ҹзҡ„дёҖеҲҮеҗҺжһңз”ұжӮЁиҮӘе·ұжүҝжӢ…!
жң¬з«ҷд»…д»…жҸҗдҫӣдёҖдёӘи§Ӯж‘©еӯҰд№ зҡ„зҺҜеўғпјҢе°ҶдёҚеҜ№д»»дҪ•иө„жәҗиҙҹжі•еҫӢиҙЈд»»гҖӮжүҖжңүиө„жәҗиҜ·еңЁдёӢиҪҪеҗҺ24е°Ҹж—¶еҶ…еҲ йҷӨгҖӮ
иӢҘж— ж„ҸдёӯдҫөзҠҜеҲ°жӮЁзҡ„зүҲжқғеҲ©зӣҠпјҢиҜ·жқҘдҝЎиҒ”зі»жҲ‘们пјҢжҲ‘们дјҡеңЁж”¶еҲ°дҝЎжҒҜдёүеӨ©еҶ…з»ҷдәҲеӨ„зҗҶ!
 收и—ҸзҒөзҢ«зҪ‘
收и—ҸзҒөзҢ«зҪ‘










