CANжҳҜController Area Networkзҡ„зј©еҶҷпјҢеҚівҖңеұҖеҹҹзҪ‘жҺ§еҲ¶еҷЁвҖқзҡ„ж„ҸжҖқпјҢеҸҜд»ҘеҪ’еұһдәҺе·ҘдёҡзҺ°еңәжҖ»зәҝзҡ„иҢғз•ҙпјҢйҖҡеёёз§°дёәCAN BUSпјҢеҚіCANжҖ»зәҝпјҢжҳҜзӣ®еүҚеӣҪйҷ…дёҠеә”з”ЁжңҖдёәе№ҝжіӣзҡ„ејҖж”ҫејҸзҺ°еңәжҖ»зәҝд№ӢдёҖгҖӮ
CANжҖ»зәҝжңҖж—©з”ЁеңЁжұҪиҪҰз”өеӯҗйўҶеҹҹпјҢдё–з•ҢдёҠдёҖдәӣи‘—еҗҚзҡ„жұҪиҪҰеҲ¶йҖ еҺӮе•ҶйғҪйҮҮз”ЁCANжҖ»зәҝжқҘе®һзҺ°жұҪиҪҰеҶ…йғЁжҺ§еҲ¶зі»з»ҹдёҺеҗ„жЈҖжөӢе’Ңжү§иЎҢжңәжһ„й—ҙзҡ„ж•°жҚ®йҖҡдҝЎгҖӮз”ұдәҺCANжҖ»зәҝеңЁж•°жҚ®йҖҡдҝЎж–№йқўиЎЁзҺ°еҮәжқҘзҡ„й«ҳеҸҜйқ жҖ§гҖҒе®һж—¶жҖ§е’ҢзҒөжҙ»жҖ§пјҢе…¶еә”з”ЁйўҶеҹҹе·Із»ҸжҲҗжұҪиҪҰз”өеӯҗйўҶеҹҹжү©еұ•еҲ°иҮӘеҠЁжҺ§еҲ¶гҖҒиҲӘз©әиҲӘеӨ©гҖҒиҲӘжө·гҖҒе·ҘдёҡжҺ§еҲ¶гҖҒеҢ»з–—еҷЁжў°гҖҒе®үе…ЁйҳІжҠӨзӯүйўҶеҹҹгҖӮ
CANжҖ»зәҝ规иҢғд»ҺCAN1.2规иҢғеҸ‘еұ•дёәе…је®№CAN1.2规иҢғзҡ„CAN2.0规иҢғ(CAN2.0Aдёәж ҮеҮҶж јејҸпјҢCAN2.0Bдёәжү©еұ•ж јејҸ)пјҢзӣ®еүҚеә”з”Ёзҡ„CANеҷЁд»¶еӨ§еӨҡз¬ҰеҗҲCAN2.0规иҢғгҖӮ
вҷҰCANжҖ»зәҝеҸ‘еұ•еҸІ
1986е№ҙпјҢBoschеңЁSAE(жұҪиҪҰе·ҘзЁӢдәәе‘ҳеҚҸдјҡ)еӨ§дјҡдёҠжҸҗеҮәCANжҖ»зәҝжҰӮеҝөпјӣ
1987е№ҙпјҢIntelжҺЁеҮә第дёҖзүҮCANжҺ§еҲ¶иҠҜзүҮ82526пјҢйҡҸеҗҺPhilipsеҚҠеҜјдҪ“д№ҹжҺЁеҮә82C200пјӣ
1993е№ҙпјҢCANзҡ„еӣҪйҷ…ж ҮеҮҶISO11898/ISO11519е…¬еёғгҖӮISO11898дёәй«ҳйҖҹеә”з”ЁпјҢISO11519дёәдҪҺйҖҹеә”з”Ёпјӣ
1994е№ҙејҖе§ӢжңүдәҶеӣҪйҷ…CANеӯҰжңҜе№ҙдјҡICCгҖӮеҗҢе№ҙпјҢзҫҺеӣҪжұҪиҪҰе·ҘзЁӢеёҲеҚҸдјҡд»ҘCANдёәеҹәзЎҖеҲ¶е®ҡдәҶSAEJ1939ж ҮеҮҶпјҢз”ЁдәҺеҚЎиҪҰе’Ңе·ҙеЈ«жҺ§еҲ¶е’ҢйҖҡдҝЎзҪ‘з»ңгҖӮ
вҷҰCANжҖ»зәҝзү№зӮ№
1).еҸҜд»ҘеӨҡдё»ж–№ејҸе·ҘдҪңпјҢзҪ‘з»ңдёҠд»»ж„ҸдёҖдёӘиҠӮзӮ№еқҮеҸҜд»ҘеңЁд»»ж„Ҹж—¶еҲ»дё»еҠЁең°еҗ‘зҪ‘з»ңдёҠзҡ„е…¶д»–иҠӮзӮ№еҸ‘йҖҒдҝЎжҒҜпјҢиҖҢдёҚеҲҶдё»д»ҺпјҢйҖҡдҝЎж–№ејҸзҒөжҙ»гҖӮ
2).зҪ‘з»ңдёҠзҡ„иҠӮзӮ№еҸҜеҲҶжҲҗдёҚеҗҢзҡ„дјҳе…Ҳзә§пјҢеҸҜд»Ҙж»Ўи¶ідёҚеҗҢзҡ„е®һж—¶иҰҒжұӮгҖӮ
3).йҮҮз”Ёйқһз ҙеқҸжҖ§дҪҚд»ІиЈҒжҖ»зәҝз»“жһ„жңәеҲ¶пјҢеҪ“дёӨдёӘиҠӮзӮ№еҗҢж—¶еҗ‘зҪ‘з»ңдёҠдј йҖҒдҝЎжҒҜж—¶пјҢдјҳе…Ҳзә§дҪҺзҡ„иҠӮзӮ№дё»еҠЁеҒңжӯўж•°жҚ®еҸ‘йҖҒпјҢиҖҢдјҳе…Ҳзә§й«ҳзҡ„иҠӮзӮ№еҸҜдёҚеҸ—еҪұе“Қең°з»§з»ӯдј йҖҒж•°жҚ®гҖӮ
4).еҸҜд»ҘзӮ№еҜ№зӮ№пјҢдёҖзӮ№еҜ№еӨҡзӮ№еҸҠе…ЁеұҖе№ҝж’ӯеҮ з§Қдј йҖҒж–№ејҸжҺҘ收数жҚ®гҖӮ
5).зӣҙжҺҘйҖҡдҝЎи·қзҰ»жңҖиҝңеҸҜиҫҫ10km(йҖҹзҺҮ4Kbpsд»ҘдёӢ)гҖӮ
6).йҖҡдҝЎйҖҹзҺҮжңҖй«ҳеҸҜиҫҫ1MB/s(жӯӨж—¶и·қзҰ»жңҖй•ҝ40m)гҖӮ
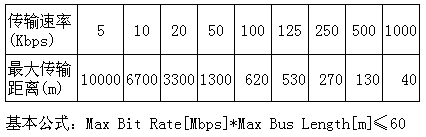
дҪҝз”ЁйқһеұҸи”ҪеҸҢз»һзәҝдј иҫ“ж—¶пјҢдј иҫ“йҖҹзҺҮдёҺдј иҫ“и·қзҰ»зҡ„е…ізі»еҰӮдёӢеӣҫжүҖзӨәгҖӮ
7).иҠӮзӮ№ж•°жңҖеӨҡеҸҜиҫҫ110дёӘгҖӮ
8).йҮҮз”Ёзҹӯеё§з»“жһ„пјҢжҜҸдёҖеё§зҡ„жңүж•Ҳеӯ—иҠӮж•°дёә8дёӘгҖӮ
9).жҜҸеё§дҝЎжҒҜйғҪжңүCRCж ЎйӘҢеҸҠе…¶д»–жЈҖй”ҷжҺӘж–ҪпјҢж•°жҚ®й”ҷиҜҜзҺҮжһҒдҪҺгҖӮ
10).йҖҡдҝЎд»ӢиҙЁеҸҜйҮҮз”ЁеҸҢз»һзәҝпјҢеҗҢиҪҙз”өзјҶе’Ңе…үзәӨпјҢдёҖиҲ¬йҮҮз”Ёе»үд»·зҡ„еҸҢз»һзәҝеҚіеҸҜгҖӮ
11).иҠӮзӮ№еңЁй”ҷиҜҜдёҘйҮҚзҡ„жғ…еҶөдёӢпјҢе…·жңүиҮӘеҠЁе…ій—ӯжҖ»зәҝзҡ„еҠҹиғҪпјҢеҲҮж–ӯе®ғдёҺжҖ»зәҝзҡ„иҒ”зі»пјҢд»ҘдҪҝжҖ»зәҝдёҠзҡ„е…¶д»–ж“ҚдҪңдёҚеҸ—еҪұе“ҚгҖӮ
вҷҰCANжҖ»зәҝзҡ„д»ІиЈҒ
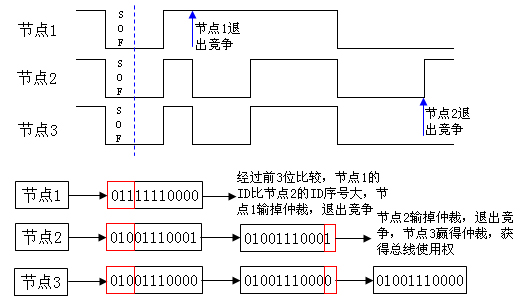
CANжҖ»зәҝйҮҮз”ЁCSMA/CD(Carrier Sense Multiple Access with collision DetectпјҢиҪҪжіўзӣ‘жөӢеӨҡи·Ҝи®ҝй—®/еҶІзӘҒжЈҖжөӢ)жҠҖжңҜгҖӮвҖңиҪҪжіўзӣ‘жөӢвҖқзҡ„ж„ҸжҖқжҳҜжҢҮеңЁжҖ»зәҝдёҠзҡ„жҜҸдёӘиҠӮзӮ№еңЁеҸ‘йҖҒдҝЎжҒҜжҠҘж–ҮеүҚйғҪеҝ…йЎ»зӣ‘жөӢеҲ°жҖ»зәҝдёҠжңүдёҖж®өж—¶й—ҙзҡ„з©әй—ІзҠ¶жҖҒгҖӮвҖңеӨҡи·Ҝи®ҝй—®вҖқзҡ„ж„ҸжҖқжҳҜдёҖж—ҰжӯӨз©әй—ІзҠ¶жҖҒиў«зӣ‘жөӢеҲ°пјҢйӮЈд№ҲжҜҸдёӘиҠӮзӮ№йғҪжңүеқҮзӯүзҡ„жңәдјҡжқҘеҸ‘йҖҒжҠҘж–ҮгҖӮвҖңеҶІзӘҒжЈҖжөӢвҖқжҳҜжҢҮеңЁдёӨдёӘиҠӮзӮ№еҗҢж—¶еҸ‘йҖҒдҝЎжҒҜж—¶пјҢиҠӮзӮ№жң¬иә«йҰ–е…ҲдјҡжЈҖжөӢеҲ°еҮәзҺ°еҶІзӘҒпјҢ然еҗҺйҮҮеҸ–зӣёеә”зҡ„жҺӘж–ҪжқҘи§ЈеҶіиҝҷдёҖеҶІзӘҒжғ…еҶөгҖӮжӯӨж—¶дјҳе…Ҳзә§й«ҳзҡ„жҠҘж–Үе…ҲеҸ‘йҖҒпјҢдҪҺдјҳе…Ҳзә§зҡ„жҠҘж–ҮеҸ‘йҖҒдјҡжҡӮеҒңгҖӮиҝҷе°ұжҳҜCANжҖ»зәҝзҡ„д»ІиЈҒпјҢд»ІиЈҒиҝҮзЁӢжҳҜдёҚдјҡеҜ№жҠҘж–Үдә§з”ҹз ҙеқҸзҡ„гҖӮ
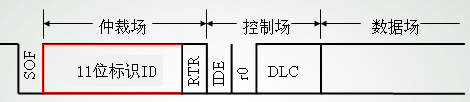
CANжҖ»зәҝдёҠжҜҸдёӘи®ҫеӨҮйғҪжңүдёҖдёӘ11дҪҚзҡ„IDдҝЎжҒҜпјҢеҗ„и®ҫеӨҮзҡ„дјҳе…Ҳзә§жҳҜж №жҚ®е…¶IDжқҘзЎ®е®ҡзҡ„пјҢIDзҡ„еәҸеҸ·и¶Ҡе°ҸпјҢе…¶дјҳе…Ҳзә§и¶Ҡй«ҳгҖӮдёӢеӣҫдёәCANжҖ»зәҝдёҠдј иҫ“зҡ„ж•°жҚ®её§ж јејҸпјҢд»ҺеӣҫдёҠеҸҜзҹҘпјҢдј иҫ“ејҖе§Ӣж ҮиҜҶз¬ҰSOFеҗҺйқўзҙ§и·ҹзҡ„е°ұжҳҜ11дҪҚж ҮиҜҶIDпјҢCANжҖ»зәҝе°ұжҳҜжҚ®жӯӨиҝӣиЎҢд»ІиЈҒе·ҘдҪңзҡ„гҖӮ
CANжҖ»зәҝзҡ„д»ІиЈҒиҝҮзЁӢеҰӮдёӢеӣҫжүҖзӨәпјҡ
вҷҰCANжҖ»зәҝзҡ„жӢ“жү‘з»“жһ„
CANжҖ»зәҝзҡ„жӢ“жү‘з»“жһ„еҰӮдёӢпјҢCAN hubжҳҜз”ЁдәҺеӨҡеҲҶж”Ҝжү©еұ•з”Ёзҡ„пјҢеҸҜд»ҘзңҒеҺ»гҖӮCANжҖ»зәҝе’ҢеҲҶж”Ҝзҡ„жң«з«ҜйғҪйңҖиҰҒеһ®жҺҘдёҖдёӘ120欧е§Ҷзҡ„з”өйҳ»жқҘз»Ҳз»“пјҢйҳІжӯўдҝЎеҸ·еҸҚе°„гҖӮ

вҷҰCANжҖ»зәҝзҡ„йҖ»иҫ‘з”өе№і
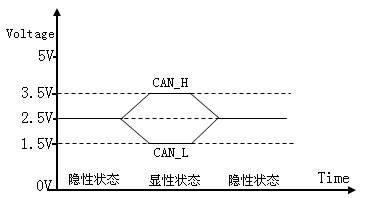
CANжҖ»зәҝе…·жңүдёӨз§ҚйҖ»иҫ‘зҠ¶жҖҒпјҢйҡҗжҖ§е’ҢжҳҫжҖ§гҖӮйҡҗжҖ§зҠ¶жҖҒдёӢпјҢVCAN_Hе’ҢVCAN_LйғҪиў«еӣәе®ҡдёәе№іеқҮз”өеҺӢз”өе№іпјҢдёӨиҖ…д№Ӣй—ҙзҡ„з”өеҺӢе·®дёә0пјӣжҳҫжҖ§зҠ¶жҖҒдёӢпјҢVCAN_Hе’ҢVCAN_Lзҡ„з”өе№іеҲҶеҲ«дёә3.5Vе’Ң1.5VпјҢдёӨиҖ…е·®еҲҶз”өеҺӢеӨ§дәҺ2VпјҢеҰӮдёӢеӣҫжүҖзӨәгҖӮ
вҷҰеёёз”ЁCANжҖ»зәҝиҠҜзүҮ
CANиҠҜзүҮжңүCANжҺ§еҲ¶еҷЁе’ҢCAN收еҸ‘еҷЁпјҢеңЁе®һйҷ…з”өи·ҜдёӯпјҢиҝҷдёӨз§ҚиҠҜзүҮйңҖиҰҒй…ҚеҗҲиө·жқҘеә”з”ЁгҖӮ
еёёз”ЁCANжҺ§еҲ¶еҷЁиҠҜзүҮжңүпјҡP87C591пјҢXAC37пјҢSJA1000пјӣ
еёёз”ЁCAN收еҸ‘еҷЁиҠҜзүҮжңүпјҡPCA82C250пјҢPCA82C251пјҢPCA82C252пјҢTJA1040пјҢTJA1041пјҢTJA1050пјҢTJA1053пјҢTJA1054гҖӮ
е…ҚиҙЈеЈ°жҳҺ/зүҲжқғз”іжҳҺ Passiontech
жүҖжңүж–Үз« дёәзҪ‘дёҠжҗңйӣҶжҲ–з§ҒдёӢдәӨжөҒеӯҰд№ д№Ӣз”ЁпјҢд»»дҪ•ж¶үеҸҠе•ҶдёҡзӣҲеҲ©зӣ®зҡ„еқҮдёҚеҫ—дҪҝз”ЁпјҢеҗҰеҲҷдә§з”ҹзҡ„дёҖеҲҮеҗҺжһңз”ұжӮЁиҮӘе·ұжүҝжӢ…!
жң¬з«ҷд»…д»…жҸҗдҫӣдёҖдёӘи§Ӯж‘©еӯҰд№ зҡ„зҺҜеўғпјҢе°ҶдёҚеҜ№д»»дҪ•иө„жәҗиҙҹжі•еҫӢиҙЈд»»гҖӮжүҖжңүиө„жәҗиҜ·еңЁдёӢиҪҪеҗҺ24е°Ҹж—¶еҶ…еҲ йҷӨгҖӮ
иӢҘж— ж„ҸдёӯдҫөзҠҜеҲ°жӮЁзҡ„зүҲжқғеҲ©зӣҠпјҢиҜ·жқҘдҝЎиҒ”зі»жҲ‘们пјҢжҲ‘们дјҡеңЁж”¶еҲ°дҝЎжҒҜдёүеӨ©еҶ…з»ҷдәҲеӨ„зҗҶ!
 收и—ҸзҒөзҢ«зҪ‘
收и—ҸзҒөзҢ«зҪ‘










