|
|
|
|
Ball Bee System |

|
|
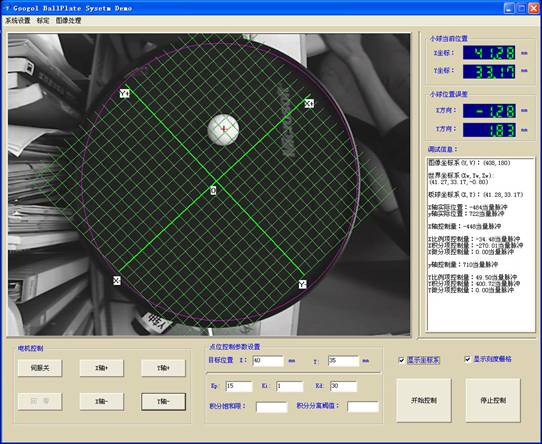
简介:板球系统 板球系统是一个多变量、非线性控制对象,其控制目标是让一个自由滚动的小球能够平衡在具有两个自由度的平板上的特定位置,或者沿一定的轨迹滚动。固高科技开发的板球系统以摄像头采集的图像信息和角度编码器... |
|
Brand
|
|
|
| Made In |
|
| Modle |
PXF0446
|
| Disctount |
|
|
| PassionTech Ord |
OrderNum |
Product Name |
Price RMB |
Brand |
|
| PXO_0629 | EL4004 | 4-channel analog output terminal 0…10 V, 12 bit, 4 x 2-wire system | 1407 | ~ | 1556 | beckhoff |  |  | | PXO_9517 | PX_GG_BQ | 板球系统 | 38000 | ~ | 42000 | RobLab | | | | PXO_9933 | RL1001_AGV | AGV自动导引车 | 132991 | ~ | 146990 | RobLab | | | | PXO_9934 | RL1001_AGV | 三维运动控制实验平台 | 42741 | ~ | 47240 | RobLab | | |
|
|
|
| |
| 板球系统是一个多变量、非线性控制对象,其控制目标是让一个自由滚动的小球能够平衡在具有两个自由度的平板上的特定位置,或者沿一定的轨迹滚动。固高科技开发的板球系统以摄像头采集的图像信息和角度编码器采集的电机位置信号为反馈信息,采用视觉反馈和编码器反馈相结合的传感方式得到小球的位置反馈,并以此为依据进行控制,通过转动平板来控制小球的实际位置和运动轨迹。作为一个具有两自由度的机械系统,板球系统通常用于对动态系统、经典控制理论和现代控制理论以及运动控制、数字图像处理等课程实验和研究。是高年级本科生、研究生乃至教师进行科学研究和实验的理想平台。 |
|
|
|
| |
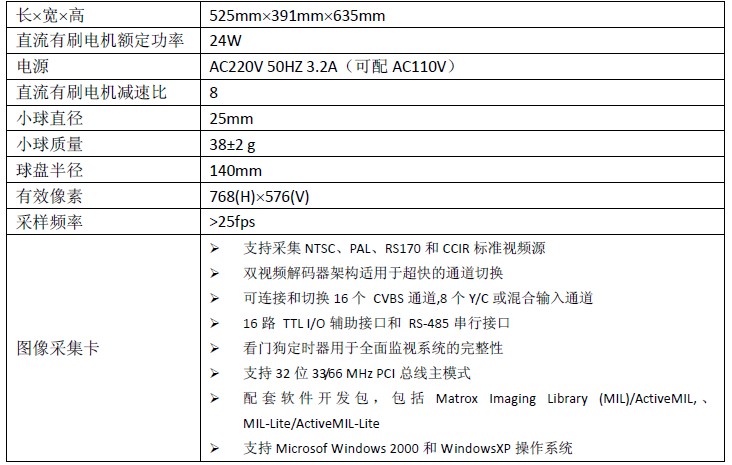
系统特点
1.采用视觉装置来检测小球的位置
2.采用“PC+运动控制器”开放式控制平台,提供源代码,方便用户自行进行二次开发
3.驱动关节采用直流伺服电机,采用进口电机驱动器
4.二维转角采用1000线旋转编码器检测
5.配备高性能图像采集卡和工业级摄像机
6.系统运行简单、易于操作、使用安全
参考实验内容
1.摄像机的线性和非线性模型标定
2.系统动力学建模分析
3.图像处理算法应用与研究
4.基于视觉技术的二维伺服控制
5.PID控制器等经典控制算法研究
6.自定义控制算法研究
VC控制软件及其界面
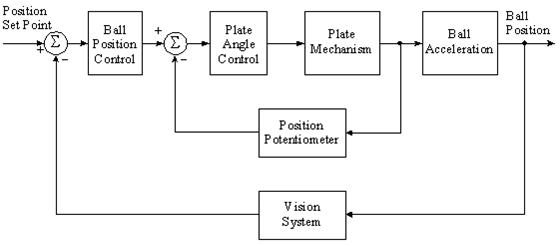
控制方框图
定购指南
| 产品代码 |
产品名称 |
产品描述和配置 |
| GPB2001 |
板球系统 |
APB-MB-2001 板球系统本体
GT-400-SV-PCI-EDU GT-400-SV型运动控制器
APB-EB-2001 电控模块
APB-VM-2001 板球视觉模块
SPB-VC-2001 板球系统控制软件 |
控制难度等级
a)稳定控制小球到圆盘中心点
b)稳定控制小球到圆盘的指定位置
c)沿设定轨迹到达指定位置
|
|
|
|
|
|

 400-878-1895
400-878-1895