
 400-878-1895
400-878-1895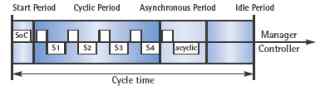

Fig. 1: Ethernet POWERLINK cycle
To avoid collisions and to make maximum use of the bandwidth, data exchange between the devices is time-slot-based. One device in the POWERLINK network takes on the function of the "Managing Node" (MN), which controls the communication, defines the clock pulse for synchronization of all nodes, and assigns the right of transmission to the individual devices. The "Controlled Nodes" (CN) only transmit when requested to by the manager. An POWERLINK cycle is divided into four time periods (Fig. 1):
- Start Period: Here the manager transmits a "Start of Cyclic" frame (SoC) as a broadcast message to all controllers. All devices in the POWERLINK network synchronize on the SoC.
- Cyclic Period: Cyclic isochronous data exchange takes place in this time period. According to a preset (configurable) schedule, the manager transmits a "Poll Request" frame (PReq) sequentially to each controller. The addressed controller responds with a "Poll Response" frame (PRes). All nodes interested in these data can receive them, whereby a real producer/consumer communication between the stations is achieved similar to CAN.
- Asynchronous Period: This time interval is available for the asynchronous, non time-critical data exchange. For example, a controller is granted the right to transmit by the manager and it can then transmit an IP-Frame.
- Idle Period: Unused period until the new POWERLINK cycle begins.
Any topologies can be implemented by using hubs. Due to the fact that only one device transmits at a time and that no collisions occur, the number of hubs is no longer restricted to two as it is with Fast Ethernet. It is a distinct advantage from a design standpoint if POWERLINK devices already have an integrated 2-port hub from which line structures can be easily implemented.
The application interface of Ethernet POWERLINK V2 is based on the mechanisms defined in the CANopen communication profile DS301 of CAN in Automation (or EN50325-4). This opens up a wide range of readily available and usable device and application profiles for POWERLINK, enables continuity of communication services between CANopen and POWERLINK systems and facilitates migration from CANopen to Ethernet POWERLINK at software level.

Fig. 2: Reference model
The reference model in Figure 2 shows the communication mechanisms and familiar elements from CANopen, such as PDO, SDO, object dictionary and network management. As is also illustrated, the SDO protocol can also be implemented via UDP/IP and therefore using standard IP messages. This enables direct access to the object dictionaries of POWERLINK devices by devices and applications outside the POWERLINK system via special POWERLINK routers.
As a result of its impressive features, the real-time industrial Ethernet protocol "POWERLINK" is suitable for implementing applications with hard real-time requirements in the range of µs. However, it is also equally suitable for implementing applications that must guarantee transmission of larger quantities of data within a defined period of time and also require the known flexibility from CANopen. Ethernet POWERLINK is a flexible communication protocol that can easily be conformed to the requirements of the application.







