400-878-1895
2310018808
Online
sales@tnkey.cn
Home
->
TeachTraining
->
RobLab-Teach-Training
冗余并联机器人
简介:冗余并联机器人 冗余并联机器人是由多个并行链构成的闭链运动系统,即末端执行器通过至少两个独立运动链与机座相连。冗余并联机器人结构上具有低惯量、大负载能力、高速高精度等优点,故它在精密仪器、现代机床、高速自动...
Brand
Made In
Modle
PXF0451
Disctount
PassionTech Ord
OrderNum
Product Name
Price RMB
Brand
PXO_0634
EL4024
4-channel analog output terminal 4…20 mA, 12 bit, 4 x 2-wire system
1407
~
1556
beckhoff
PXO_9521
PX_GG_3ZY
3自由度冗余并联机器人
123310
~
136290
RobLab
PXO_9522
PX_GG_4ZY
4自由度冗余并联机器人
159600
~
176400
RobLab
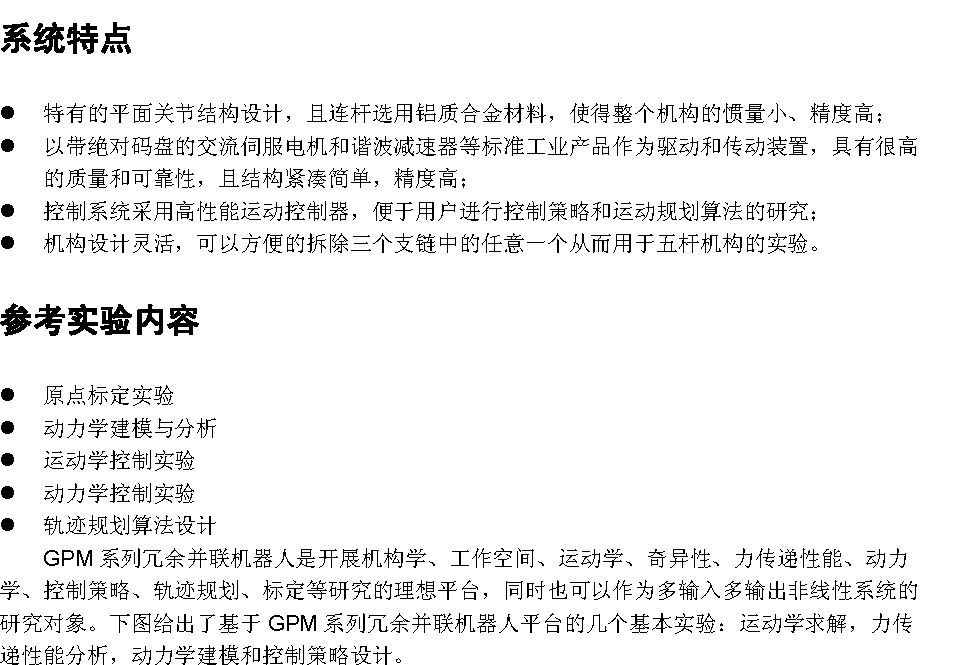
冗余并联机器人
冗余并联机器人是由多个并行链构成的闭链运动系统,即末端执行器通过至少两个独立运动链与机座相连。冗余并联机器人结构上具有低惯量、大负载能力、高速高精度等优点,故它在精密仪器、现代机床、高速自动化生产线等领域有着广阔的应用前景。固高GPM系列冗余并联机器人由同一个平面内的三个二杆开链机构连结而成,末端执行器安装在开链机构相互连结的地方,整个机构由三个分别安装在基座处的交流伺服电机驱动。电机的控制通过GT-400-PCI-SV控制卡实现,电机的转角可以通过绝对位置编码器得到。该机构实际上可以看作是传统的五杆机构附加了一条支链,该冗余支链可以消除五杆机构的奇异性,改善力传递性能,并且得到唯一的前向运动学解。同时冗余驱动使得机构的模型更加复杂,进而对系统控制策略的要求也更高,这也就使冗余并联机器人的研究工作变得更具挑战性。
Related Products
冗余并联机器人
Question About the Products
If you have Anyquestion about the products,Please write here!
Title:
Input Question:
Contact:

 400-878-1895
400-878-1895