ICS


GB/T XXXX.1пјҚXXXX
е•Ҷз”ЁиҪҰжҺ§еҲ¶зі»з»ҹеұҖеҹҹзҪ‘з»ңпјҲCAN пјүйҖҡдҝЎеҚҸи®®
第 1йғЁеҲҶпјҡзү©зҗҶеұӮпјҢ250еҚғжҜ”зү№/з§’пјҢеұҸи”ҪеҸҢз»һзәҝ
Physical Layer, 250K bits/sec, Twisted Shielded Pair
пјҲSAE1939-11пјҡ1999 MODпјү
пјҲеҫҒжұӮж„Ҹи§ҒзЁҝпјү
20xx-xx-xx еҸ‘еёғ20xx-xx-xx е®һж–ҪпјҡеӣҪ家ж ҮеҮҶеҢ–з®ЎзҗҶ委е‘ҳдјҡ
GB/T XXXX.1пјҚXXXX
еүҚиЁҖ
GB/T××××гҖҠе•Ҷз”ЁиҪҰжҺ§еҲ¶зі»з»ҹеұҖеҹҹзҪ‘з»ңпјҲ CAN жҖ»зәҝпјүйҖҡдҝЎеҚҸи®®гҖӢеҢ…жӢ¬ 10дёӘйғЁеҲҶпјҡ
—第 1йғЁеҲҶпјҡзү©зҗҶеұӮ—еұҸи”ҪеҸҢз»һзәҝ(250KжҜ”зү№/з§’)
—第 2йғЁеҲҶпјҡзү©зҗҶеұӮ—йқһиҪҰиҪҪиҜҠж–ӯиҝһжҺҘеҷЁ
—第 3йғЁеҲҶпјҡзү©зҗҶеұӮ—йқһеұҸи”ҪеҸҢз»һзәҝ(250KжҜ”зү№/з§’)
—第 4йғЁеҲҶпјҡж•°жҚ®й“ҫи·ҜеұӮ
—第 5йғЁеҲҶпјҡеә”з”ЁеұӮ—иҪҰиҫҶ
—第 6йғЁеҲҶпјҡеә”з”ЁеұӮ—иҜҠж–ӯ
—第 7йғЁеҲҶпјҡзҪ‘з»ңз®ЎзҗҶ
—第 8йғЁеҲҶпјҡеҸӮж•°з»„еҲҶй…Қ
—第 9йғЁеҲҶпјҡең°еқҖе’Ңж ҮиҜҶеҲҶй…Қ
—第 10йғЁеҲҶпјҡеҸҜз–‘еҸӮж•°зј–еҸ·пјҲSPNпјү
—第 11йғЁеҲҶпјҡзҪ‘з»ңеұӮ
жң¬йғЁеҲҶдёә GB/T××××зҡ„第 1йғЁеҲҶпјҢеҜ№еә”дәҺ SAE1939-11пјҡ1999 гҖҠзү©зҗҶеұӮпјҢ250kжҜ”зү№/з§’пјҢеұҸи”ҪеҸҢз»һзәҝгҖӢпјҢжң¬йғЁеҲҶдёҺ SAE1939-11зҡ„дёҖиҮҙжҖ§зЁӢеәҰдёәдҝ®ж”№йҮҮз”ЁпјҲжҠҖжңҜеҶ…е®№е®Ңе…ЁзӯүеҗҢпјүпјҢдё»иҰҒе·®ејӮеҰӮдёӢпјҡ
—жҢү 1.1规е®ҡеўһеҠ дәҶ”еүҚиЁҖ”гҖҒ“иҢғеӣҙ”гҖӮ
—е°ҶеҺҹж–Үеј•з”Ёзҡ„ SAEжңүе…іж ҮеҮҶж”№дёәеј•з”ЁжҲ‘еӣҪзҡ„зӣёе…іеӣҪж ҮгҖӮ
—иҝӣиЎҢдәҶзј–иҫ‘жҖ§дҝ®ж”№гҖӮ
жң¬йғЁеҲҶзҡ„йҷ„еҪ• AгҖҒBгҖҒCгҖҒDеқҮдёәиө„ж–ҷжҖ§йҷ„еҪ•гҖӮжң¬йғЁеҲҶз”ұе…ЁеӣҪжұҪиҪҰж ҮеҮҶеҢ–жҠҖжңҜ委е‘ҳдјҡжҸҗеҮәгҖӮжң¬йғЁеҲҶз”ұе…ЁеӣҪжұҪиҪҰж ҮеҮҶеҢ–жҠҖжңҜ委е‘ҳдјҡеҪ’еҸЈгҖӮжң¬йғЁеҲҶз”ұиҙҹиҙЈиө·иҚүгҖӮжң¬йғЁеҲҶдё»иҰҒиө·иҚүдәәпјҡ
GB/T××××.1
е•Ҷз”ЁиҪҰжҺ§еҲ¶зі»з»ҹеұҖеҹҹзҪ‘з»ңпјҲCAN жҖ»зәҝпјүйҖҡдҝЎеҚҸи®®
第 1йғЁеҲҶпјҡзү©зҗҶеұӮ—еұҸи”ҪеҸҢз»һзәҝ(250еҚғжҜ”зү№/з§’)
1.иҢғеӣҙпјҡ
жң¬йғЁеҲҶ规е®ҡдәҶ CAN жҖ»зәҝзҡ„зү©зҗҶеұӮ—еұҸи”ҪеҸҢз»һзәҝ(250еҚғжҜ”зү№ /з§’)зҡ„з”өж°”жҖ§иғҪеҸӮж•°зӯүгҖӮ
жң¬йғЁеҲҶйҖӮз”ЁдәҺ M2гҖҒM3еҸҠ Nзұ»иҪҰиҫҶпјҢе…¶д»–иҪҰиҫҶеҸҜеҸӮиҖғгҖӮ
2пјҺ规иҢғжҖ§еј•з”Ёж–Ү件дёӢеҲ—ж–Ү件дёӯзҡ„жқЎж¬ҫйҖҡиҝҮжң¬йғЁеҲҶзҡ„еј•з”ЁиҖҢжҲҗдёәжң¬йғЁеҲҶзҡ„жқЎж¬ҫгҖӮеҮЎжҳҜжіЁж—Ҙжңҹзҡ„еј•з”Ёж–Ү件пјҢе…¶йҡҸеҗҺжүҖжңүзҡ„дҝ®ж”№еҚ•пјҲдёҚеҢ…жӢ¬еӢҳиҜҜзҡ„еҶ…е®№пјүжҲ–дҝ®и®ўзүҲеқҮдёҚйҖӮз”ЁдәҺжң¬йғЁеҲҶпјҢ然иҖҢйј“еҠұж №жҚ®жң¬йғЁеҲҶиҫҫжҲҗеҚҸи®®зҡ„еҗ„ж–№з ”з©¶жҳҜеҗҰеҸҜдҪҝз”Ёиҝҷдәӣж–Ү件зҡ„жҳҖж–°зүҲжң¬гҖӮеҮЎжҳҜдёҚжіЁж—Ҙжңҹзҡ„еј•з”Ёж–Ү件пјҢе…¶жҳҖж–°зүҲ
жң¬йҖӮз”ЁдәҺжң¬йғЁеҲҶгҖӮ GB/T××××йҒ“и·ҜиҪҰиҫҶ -йқҷз”өж”ҫз”өдә§з”ҹзҡ„з”өйӘҡжү°иҜ•йӘҢж–№жі•пјҲIDT ISO10605пјү GB/T 17737.1 е°„йў‘з”өзјҶ第 1йғЁеҲҶпјҡжҖ»и§„иҢғ
—жҖ»еҲҷгҖҒе®ҡд№үгҖҒиҰҒжұӮе’ҢиҜ•йӘҢж–№жі•пјҲ idt IEC
60096-1пјү ISO6722 Road vehicles -- 60 V and 600 V single-core cables -- Dimensions, test methods and requirements
3 зү©зҗҶеұӮдёҖиҲ¬иҰҒжұӮ
- 3пјҺ1зү©зҗҶеұӮ
- зү©зҗҶеұӮе®һзҺ°зҪ‘з»ңдёӯз”өжҺ§еҚ•е…ғпјҲ ECUпјүзҡ„з”өиҝһжҺҘгҖӮ ECUзҡ„ж•°зӣ®йҷҗеҲ¶дәҺжҖ»зәҝзәҝи·Ҝзҡ„иҙҹиҪҪжүҝеҸ—иғҪеҠӣгҖӮж №жҚ®жң¬йғЁеҲҶзҡ„з”өж°”еҸӮж•°е®ҡд№үпјҢеңЁзү№е®ҡзҪ‘ж®өдёҠ ECUзҡ„жҳҖеӨ§ж•°зӣ®е®ҡдёә 30гҖӮ
- 3пјҺ2зү©зҗҶд»ӢиҙЁ
- зү©зҗҶд»ӢиҙЁдёәеұҸи”ҪеҸҢз»һзәҝгҖӮеҸҢз»һзәҝзү№жҖ§йҳ»жҠ—дёә 120ΩпјҢз”өжөҒеҜ№з§°й©ұеҠЁгҖӮдёӨжқЎзәҝеҲҶеҲ«е‘ҪеҗҚдёә CAN_Hе’Ң CAN_LгҖӮзӣёеә” ECU зҡ„з®Ўи„ҡеј•зәҝд№ҹеҲҶеҲ«з”Ё CAN_Hе’Ң CAN_LжқҘиЎЁзӨәгҖӮ第дёүжқЎиҝһжҺҘеұҸи”Ҫз»Ҳз«Ҝзҡ„зәҝз”Ё CAN_SHLDиЎЁзӨәгҖӮ
- 3пјҺ3е·®еҠЁз”өеҺӢ CAN_Hе’ҢCAN_LзӣёеҜ№дәҺжҜҸдёӘеҚ•зӢ¬ECUең°зҡ„з”өеҺӢжңүVCAN_Hе’ҢVCAN_LгҖӮVCAN_Hе’ҢVCAN_L
- й—ҙзҡ„е·®еҠЁз”өеҺӢз”ұдёӢејҸи®Ўз®—пјҡ Vdiff = VCAN_H
- — VCAN_LпјҲ1пјү
- 3пјҺ4жҖ»зәҝз”өе№іжҖ»зәҝжҖ»жҳҜеӨ„дәҺдёӨз§ҚйҖ»иҫ‘зҠ¶жҖҒпјҢеҚійҡҗжҖ§е’ҢжҳҫжҖ§зҡ„е…¶дёӯд№ӢдёҖпјҲи§Ғеӣҫ 1пјүгҖӮеңЁйҡҗжҖ§зҠ¶жҖҒ VCAN_H
- е’Ң VCAN_Lеӣәе®ҡеңЁдёҖдёӘдёӯеҖјз”өеҺӢз”өе№ігҖӮеңЁеёҰз»Ҳз«Ҝз”өйҳ»зҡ„жҖ»зәҝдёҠпјҢVdiffжҺҘиҝ‘дәҺйӣ¶гҖӮжҳҫжҖ§зҠ¶жҖҒз”ұеӨ§дәҺжҳҖе°Ҹй—Ёйҷҗзҡ„е·®еҠЁз”өеҺӢиЎЁзӨәгҖӮжҳҫжҖ§зҠ¶жҖҒиҰҶзӣ–йҡҗжҖ§зҠ¶жҖҒ并еңЁжҳҫжҖ§дҪҚдёӯдј иҫ“гҖӮ
- 3пјҺ5д»ІиЈҒжңҹй—ҙзҡ„жҖ»зәҝз”өе№і
еңЁзү№е®ҡзҡ„дҪҚж—¶й—ҙйҮҢпјҢжҖ»зәҝзәҝи·ҜдёҠдёӨдёӘдёҚеҗҢзҡ„ ECUзҡ„жҳҫжҖ§дҪҚе’ҢйҡҗжҖ§дҪҚзҡ„еҶІзӘҒд»ІиЈҒз»“жһңжҳҜжҳҫжҖ§дҪҚгҖӮпјҲи§Ғеӣҫ 1пјү
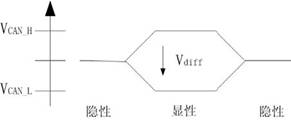
еӣҫ 1 зү©зҗҶдҪҚзӨәж„Ҹеӣҫ
- 3пјҺ6е…ұжЁЎзҡ„жҖ»зәҝз”өеҺӢиҢғеӣҙ
- е…ұжЁЎзҡ„жҖ»зәҝз”өеҺӢиҢғеӣҙе®ҡд№үдёә CAN_Hе’Ң CAN_Lзҡ„иҫ№з•Ңз”өеҺӢеҖјгҖӮеңЁиҝһжҺҘеңЁжҖ»зәҝдёҠзҡ„жүҖжңү ECUжӯЈеёёиҝҗиЎҢзҡ„еүҚжҸҗдёӢпјҢCAN_Hе’Ң CAN_Lзҡ„з”өеҺӢеҖјз”ұеҗ„дёӘ ECUеҜ№ең°жөӢеҫ—гҖӮ
- 3пјҺ7жҖ»зәҝз»Ҳз«Ҝ
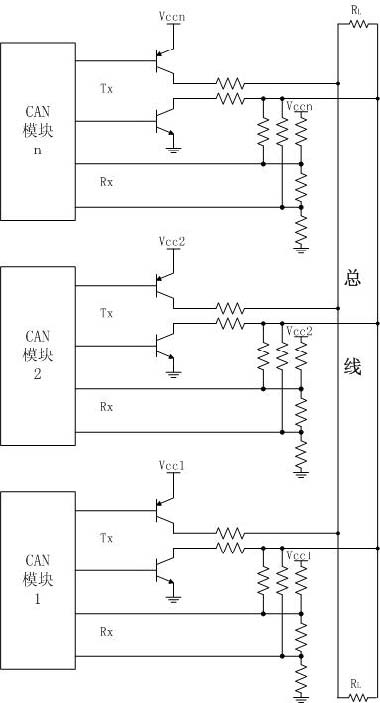
- еңЁзәҝи·Ҝзҡ„дёӨдёӘжң«з«ҜдёҠпјҢеҝ…йЎ»жҺҘжңүиҙҹиҪҪз”өйҳ» Rз»Ҳз»“ LгҖӮRLдёҚеҫ—ж”ҫзҪ®еңЁ ECUдёӯпјҢд»ҘйҒҝе…Қе…¶дёӯдёҖдёӘ ECUж–ӯзәҝпјҢжҖ»зәҝе°ҶеӨұеҺ»з»Ҳз«ҜпјҲи§Ғеӣҫ 2пјүгҖӮ
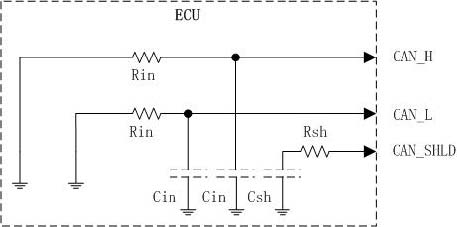
- 3пјҺ8еҶ…йғЁз”өйҳ»
- ECUзҡ„еҶ…йғЁз”өйҳ» RinдёәйҡҗжҖ§дҪҚзҠ¶жҖҒпјҢ ECUе’ҢжҖ»зәҝзәҝи·Ҝж–ӯејҖдёӢзҡ„ CAN_HпјҲжҲ– CAN_Lпјүе’Ң ECUең°д№Ӣй—ҙзҡ„з”өйҳ»еҖјгҖӮпјҲи§Ғеӣҫ 3пјүгҖӮ
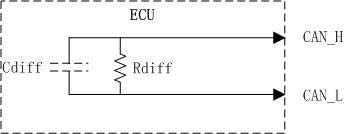
- 3пјҺ9е·®еҠЁеҶ…йғЁз”өйҳ»
- ECUзҡ„е·®еҠЁеҶ…йғЁз”өйҳ»RdiffдёәйҡҗжҖ§дҪҚзҠ¶жҖҒпјҢECUе’ҢжҖ»зәҝзәҝи·Ҝж–ӯејҖдёӢзҡ„ CAN_Hе’ҢCAN_Lй—ҙзҡ„з”өйҳ»еҖјгҖӮпјҲи§Ғеӣҫ 4пјүгҖӮ
- 3пјҺ10еҶ…йғЁз”өе®№
- ECUзҡ„еҶ…йғЁз”өе®№ CinдёәйҡҗжҖ§дҪҚзҠ¶жҖҒпјҢ ECUе’ҢжҖ»зәҝзәҝи·Ҝж–ӯејҖдёӢзҡ„ CAN_HпјҲжҲ– CAN_Lпјүе’Ң ECUйҖ»иҫ‘ең°д№Ӣй—ҙзҡ„з”өе®№еҖјгҖӮпјҲи§Ғеӣҫ 3пјүгҖӮ
- 3пјҺ11е·®еҠЁеҶ…йғЁз”өе®№
- ECUзҡ„е·®еҠЁеҶ…йғЁз”өе®№CdiffдёәйҡҗжҖ§дҪҚзҠ¶жҖҒпјҢECUе’ҢжҖ»зәҝзәҝи·Ҝж–ӯејҖдёӢзҡ„ CAN_Hе’ҢCAN_Lй—ҙзҡ„з”өе®№еҖјгҖӮпјҲи§Ғеӣҫ 4пјүгҖӮ
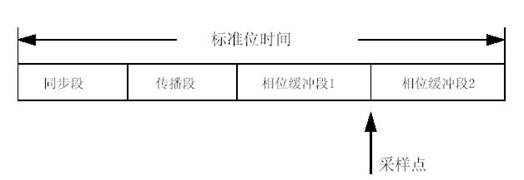
- 3пјҺ12дҪҚж—¶й—ҙ
дҪҚж—¶й—ҙ tBдёәдёҖжҜ”зү№зҡ„жҢҒз»ӯж—¶й—ҙпјҲи§Ғеӣҫ 5пјүгҖӮеңЁдҪҚж—¶й—ҙеҶ…жү§иЎҢзҡ„жҖ»зәҝз®ЎзҗҶеҠҹиғҪпјҲеҰӮ ECUеҗҢжӯҘпјҢзҪ‘з»ңдј иҫ“延иҝҹиЎҘеҒҝе’ҢйҮҮж ·зӮ№е®ҡдҪҚпјүз”ұ CANеҚҸи®®зҡ„еҸҜзј–зЁӢдҪҚи®Ўж—¶йҖ»иҫ‘йӣҶжҲҗз”өи·Ҝе®ҡд№үгҖӮжң¬ж ҮеҮҶеҜ№еә”дәҺ 250kbit/sдҪҚж—¶й—ҙжҳҜ 4μsгҖӮ
CANеҚҸи®®йӣҶжҲҗз”өи·Ҝдҫӣеә”е•ҶйҖҡеёёдҪҝз”ЁдҪҚж®өеҗҚз§°пјҢе®ғд№ҹеҸҜиғҪжҳҜ 2дёӘдҪҚзҡ„ж®өеҜ№еә”дёҖдёӘеҗҚз§°гҖӮ
 еӣҫ 2 зү©зҗҶеұӮеҠҹиғҪ
еӣҫ 2 зү©зҗҶеұӮеҠҹиғҪ
еӣҫ 3 еӨ„дәҺйҡҗжҖ§зҠ¶жҖҒзҡ„ ECUеҶ…йғЁз”өе®№е’Ңз”өйҳ»зҡ„еӣҫи§Ј
еӣҫ 4 еӨ„дәҺйҡҗжҖ§зҠ¶жҖҒзҡ„ ECUе·®еҠЁеҶ…йғЁз”өе®№е’Ңз”өйҳ»зҡ„еӣҫи§Ј
жіЁ
a. еҗҢжӯҘж®өпјҲSYNC SEGпјү
—дҪҚж—¶й—ҙдёӯзҡ„иҝҷйғЁеҲҶжҳҜз”ЁжқҘеҗҢжӯҘжҖ»зәҝдёҠзҡ„дёҚеҗҢ ECUгҖӮиҫ№жІҝеҢ…еҗ«еңЁжӯӨдҪҚж®өдёӯгҖӮ
b. дј ж’ӯж®өпјҲ PROP SEGпјү
—дҪҚж—¶й—ҙдёӯзҡ„иҝҷйғЁеҲҶжҳҜз”ЁжқҘиЎҘеҒҝзҪ‘з»ңдёӯз”ұдәҺжҖ»зәҝдј ж’ӯж—¶й—ҙе’Ң ECUеҶ…йғЁе»¶иҝҹж—¶й—ҙйҖ жҲҗзҡ„зү©зҗҶ延иҝҹж—¶й—ҙгҖӮгҖӮ
c. зӣёдҪҚзј“еҶІж®ө 1пјҲPHASE SEG1пјүе’ҢзӣёдҪҚзј“еҶІж®ө 2пјҲPHASE SEG2пјү
—иҝҷдәӣзӣёдҪҚзј“еҶІж®өз”ЁжқҘиЎҘеҒҝиҫ№жІҝзҡ„зӣёдҪҚиҜҜе·®гҖӮе®ғиғҪеӨҹз”ұйҮҚж–°еҗҢжӯҘжқҘеҠ й•ҝжҲ–зј©зҹӯгҖӮ
d. йҮҮж ·зӮ№
—жҳҜжҢҮиҜ»еҸ–并解йҮҠжҖ»зәҝдёҠеҗ„дҪҚеҖјзҡ„дёҖдёӘж—¶й—ҙзӮ№гҖӮе®ғдҪҚдәҺзӣёдҪҚзј“еҶІж®ө 1
зҡ„е°ҫйғЁгҖӮеӣҫ 5 дҪҚеҲ’еҲҶ
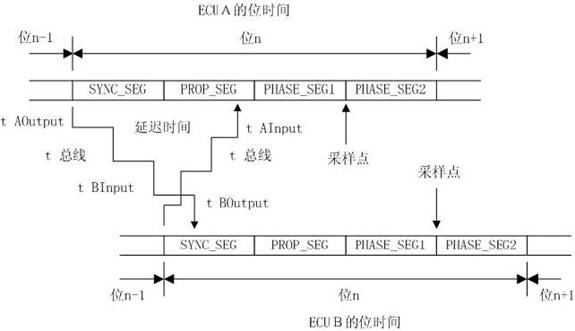
- 3пјҺ13еҶ…йғЁе»¶иҝҹж—¶й—ҙ
- ECUзҡ„еҶ…йғЁе»¶иҝҹж—¶й—ҙ tECUе®ҡд№үдёәзӣёеҜ№дәҺеҚҸи®®йӣҶжҲҗз”өи·Ҝзҡ„дҪҚи®Ўж—¶йҖ»иҫ‘еҚ•е…ғпјҢеңЁдј иҫ“е’ҢжҺҘеҸ—дёӯе…ЁйғЁејӮжӯҘ延иҝҹзҡ„жҖ»е’ҢгҖӮиҜҰи§Ғеӣҫ 6гҖӮ
- 3пјҺ13пјҺ1еҗҢжӯҘ
еҢ…жӢ¬зЎ¬еҗҢжӯҘе’ҢйҮҚеҗҢжӯҘпјҢе®ғ们еә”з¬ҰеҗҲпјҡ
a) еңЁдёҖдёӘдҪҚж—¶й—ҙеҶ…еҸӘе…Ғи®ёдёҖдёӘеҗҢжӯҘгҖӮ
b) еҸӘжңүеүҚйҮҮж ·зӮ№пјҲеҺҹе…ҲжҖ»зәҝиҜ»ж•°пјүжөӢеҫ—зҡ„еҖјдёҺзҙ§и·ҹиҫ№жІҝеҗҺжҖ»зәҝзҡ„иҜ»ж•°еҖјдёҚеҗҢж—¶пјҢжүҚжҠҠиҫ№жІҝз”ЁдәҺеҗҢжӯҘгҖӮ
c) еҸӘиҰҒжҳҜ“йҡҗжҖ§”еҲ°“жҳҫжҖ§”зҡ„иҫ№жІҝпјҢеңЁдёҠиҝ°зҡ„иҫ№жІҝдёӯдҪҝз”ЁзЎ¬еҗҢжӯҘгҖӮ
d) йҒөеҫӘ规еҲҷ aе’Ң bзҡ„жүҖжңүе…¶д»–“йҡҗжҖ§”еҲ°“жҳҫжҖ§”зҡ„иҫ№зјҳеҸҜдҪҝз”ЁйҮҚеҗҢжӯҘгҖӮдҪҶжңүдҫӢеӨ–пјҢеҰӮжһңеңЁеҗҢжӯҘдёӯеҸӘжңү“йҡҗжҖ§”еҲ°“жҳҫжҖ§”зҡ„иҫ№жІҝеҸҜд»ҘдҪҝз”ЁпјҢеңЁ“йҡҗжҖ§”еҲ°“жҳҫжҖ§”иҫ№жІҝдёӯеёҰжңүжӯЈзӣёй”ҷиҜҜеҜјиҮҙеҸ‘йҖҒеҷЁе°ҶдёҚеҸҜиғҪиҝӣиЎҢйҮҚеҗҢжӯҘгҖӮ
3пјҺ13пјҺ2еҗҢжӯҘи·іиҪ¬е®ҪеәҰпјҲ SJWпјү
еҗҢжӯҘзҡ„з»“жһңеҸҜиғҪжҳҜзӣёдҪҚзј“еҶІж®ө 1еҸҳй•ҝиҖҢзӣёдҪҚзј“еҶІж®ө 2зј©зҹӯгҖӮзӣёдҪҚзј“еҶІж®өеўһй•ҝжҲ–зј©зҹӯзҡ„ж•°йҮҸжңүдёҖдёӘдёҠйҷҗпјҢиҝҷдёӘдёҠйҷҗз”ұеҗҢжӯҘи·іиҪ¬е®ҪеәҰз»ҷе®ҡзҡ„гҖӮеҗҢжӯҘи·іиҪ¬е®ҪеәҰдёҚеӨ§дәҺзӣёдҪҚзј“еҶІж®ө 1гҖӮ
жіЁ
1:иҫ“е…Ҙиҫ“еҮә ECU延иҝҹзҡ„жҖ»е’ҢеҢ…жӢ¬ ECUзӣёеҜ№дәҺдҪҚе®ҡж—¶йҖ»иҫ‘иҖҢиЁҖпјҢжҖ»зәҝж–ӯејҖдёӢжөӢеҫ—пјҢ ECUе…ій”®еҸӮж•°и§Ғ
3.12 t_ECU = t_Output + t_Input [_OutputгҖҒInputпјҡ]
2:жӯЈзЎ®зҡ„д»ІиЈҒиҰҒж»Ўи¶ід»ҘдёӢжқЎд»¶пјҡ
tAECU + tBECU + 2*tBusline<=tPROP_SEG +( tPHASE_SEG1-tSJW) еҗҢжӯҘж®ө并дёҚйҮҚиҰҒпјҢеӣ иҜҘж®өеҸҜиғҪеңЁжЁЎејҸй—ҙиҪ¬жҚўзҡ„зӣёз§»дҪҚдёӯдёўеӨұгҖӮtSJWжҳҜзӣёдҪҚзј“еҶІж®ө 1зҡ„дёҖйғЁеҲҶпјҢз”ЁжқҘиЎҘеҒҝзӣёй”ҷиҜҜгҖӮе®ғжҳҜд»ҺеҸҜз”Ёж—¶й—ҙдёҠеҮҸеҺ»зҡ„пјҢеӣ дёәеі°еҖјеҸҜиғҪеҜјиҮҙ tSJWзҡ„зӣёз§»дҪҚиҖҢеӨұеҺ»еҗҢжӯҘгҖӮиҝҷж„Ҹе‘ізқҖе…ідәҺ ECU AеҗҢжӯҘзҡ„е…ҲеҜјдј иҫ“дҪҚж—¶еәҸйҖ»иҫ‘еә”еҪ“зҹҘйҒ“еңЁйҮҮж ·зӮ№еӨ„жҖ»зәҝдёҠдҪҚ nзҡ„з”өе№ігҖӮ t_ECUзҡ„иҢғеӣҙдё»иҰҒеҸ–еҶідәҺдҪҚйҖҹзҺҮпјҢжҖ»зәҝй•ҝеәҰе’ҢеҸҜиғҪзҡ„дҪҚж—¶й—ҙй•ҝеәҰпјҢеҰӮд»ІиЈҒжқЎд»¶жүҖзӨәгҖӮ
3:йӣҶжҲҗз”өи·ҜеҸҜжҺҘеҸ—зҡ„жҷ¶жҢҜе…¬е·®е’ҢжҪңеңЁзҡ„еӨұжӯҘеҸ–еҶідәҺзӣёдҪҚзј“еҶІж®ө 1е’Ң 2гҖӮ еӣҫ 6
—д»ІиЈҒжңҹй—ҙ ECU Aе’Ң Bзҡ„дҪҚе®ҡж—¶йҖ»иҫ‘е…ізі»
3пјҺ14 CANзҡ„дҪҚе®ҡж—¶иҰҒжұӮ
еә”дҝқиҜҒдёҚеҗҢдҫӣеә”е•Ҷзҡ„е…ғ件иғҪеӨҹз»„жҲҗзЁіе®ҡзҡ„зҪ‘з»ңгҖӮиӢҘжІЎжңүд»»дҪ•дҪҚи®Ўж—¶йҷҗеҲ¶пјҢдёҚеҗҢиЈ…зҪ®еҲҷдёҚиғҪжӯЈзЎ®жҺҘеҸ—е’Ңи§ЈйҮҠжңүж•ҲдҝЎжҒҜгҖӮеңЁзү№е®ҡзҪ‘з»ңжқЎд»¶дёӢпјҢзү№е®ҡиЈ…зҪ®еҸҜиғҪеҸҜд»ҘеҜ№зҪ‘з»ңиҝӣиЎҢйқһжі•и®ҝй—®гҖӮеҸҰеӨ–пјҢиҝҷдҪҝзҪ‘з»ңз®ЎзҗҶпјҲзі»з»ҹиҜҠж–ӯпјүеҸҳеҫ—ејӮеёёеӣ°йҡҫгҖӮCANиҠҜзүҮдҫӣеә”е•Ҷд№ҹжҺЁиҚҗзү№е®ҡзҪ‘з»ңдёҠзҡ„жүҖжңүиЈ…зҪ®еә”иғҪз”ЁзӣёеҗҢзҡ„дҪҚж—¶й—ҙеҖјзј–зЁӢгҖӮ
жүҖжңү CANзҡ„йӣҶжҲҗз”өи·Ҝе°ҶдҪҚж—¶й—ҙеҲҶеүІдёәжӣҙе°Ҹзҡ„ж—¶й—ҙйҮҸ tqгҖӮеҜ№дәҺеӨ§еӨҡж•°пјҢ CAN йӣҶжҲҗз”өи·ҜпјҢ 1tq=250nsпјҲ16MHzж—¶й’ҹпјүпјҲеҶіе®ҡдәҺжҢҜиҚЎеҷЁйў‘зҺҮе’Ңжіўзү№зҺҮйў„ж Үе®ҡпјүгҖӮеӣ жӯӨпјҢдёәдәҶдҝқиҜҒзҪ‘з»ңиҝҗиЎҢзЁіе®ҡпјҢдҪҚж—¶й—ҙзү№е®ҡеҖјйңҖиҰҒз”ЁеҜ„еӯҳеҷЁзЎ®е®ҡпјҢд»ҘпјҢд»ҘдҪҝжүҖжңүиҠӮзӮ№иғҪеӨҹиҫҫеҲ°дј ж’ӯ延иҝҹе’Ңж—¶й’ҹиҜҜе·®зҡ„жҳҖдҪіжҠҳиЎ·зӮ№пјҲдёҚеҗҢ CANеҷЁд»¶еҲ¶йҖ е•ҶеҜ№дҪҚж®өе®ҡд№үдјҡеӯҳеңЁе·®ејӮгҖӮпјүе»әи®®иў«йҖүдёӯзҡ„ tqе…Ғи®ёйҮҮж ·зӮ№пјҲи§Ғеӣҫ 5пјүж”ҫеңЁжҹҗдёӘдҪҚж—¶й—ҙйқ иҝ‘дҪҶдёҚи¶…иҝҮ 7/8еӨ„зҡ„дҪҚзҪ®пјҲ0.875
×4μs=3.5μsпјүгҖӮиҝҷдҪҝдј ж’ӯ延иҝҹе’Ңж—¶й’ҹиҜҜе·®иҫҫеҲ°жҳҖдјҳгҖӮеңЁж ҮеҮҶж—¶й’ҹйў‘зҺҮдёӢиҝҗиҪ¬зҡ„е…ёеһӢжҺ§еҲ¶еҷЁйӣҶжҲҗз”өи·Ҝе»әи®®йҮҮз”ЁдёӢеҲ—еҖјгҖӮеҜ№дәҺе…¶д»–йў‘зҺҮпјҢеҸҜйҖүжӢ©
дёҚеҗҢзҡ„еҖјпјҢд»ҘдҝқиҜҒйҮҮж ·зӮ№е°ҪеҸҜиғҪйқ иҝ‘дҪҶдёҚи¶…иҝҮжҳҖдҪіж—¶й—ҙгҖӮ 16MHzйҮҮж ·зӮ№=0.875tb tq=250nsпјҲ16tq/bitпјү tsync=250nsпјҲ1 tqпјү TSEG1=3.25μsпјҲ13tqпјү TSEG2=500nsпјҲ2tqпјү
20MHz йҮҮж ·зӮ№=0.85tb tq=200nsпјҲ20tq/bitпјү tsync=200nsпјҲ1tqпјү TSEG1=3.2μsпјҲ16tqпјү TSEG2=300nsпјҲ3tqпјү
SJW=1tqпјҲSJWжҳҜ TSEG1е’Ң TSEG2зҡ„дёҖйғЁеҲҶпјүжҖ»дҪҚж—¶й—ҙ= TSEG1+ TSEG2+Tsync=13+2+1=16tq=4μs пјҲд»Ҙ 16MH Z ж—¶й’ҹдёәдҫӢпјү
дј ж’ӯж®ө +зӣёдҪҚзј“еҶІж®ө 1=TSEG1 зӣёдҪҚзј“еҶІж®ө 2=TSEG2 еҗҢжӯҘж®ө=SYNC_SEG
дҪҚе®ҡж—¶еҜ„еӯҳеҷЁзҡ„йҖүжӢ©пјҢйҖҡеёёиҰҒжұӮжүҖжңүиҠӮзӮ№дҪҝз”Ёжҷ¶дҪ“жҢҜиҚЎеҷЁпјҢд»ҘдҝқиҜҒиғҪеӨҹиҫҫеҲ°иЎЁ 1з»ҷе®ҡзҡ„ж—¶й’ҹиҜҜе·®гҖӮ
иЎЁ 1 дёҺжҖ»зәҝж–ӯејҖзҡ„ ECUзҡ„дәӨжөҒеҸӮж•°
еҸӮж•° |
з¬ҰеҸ·
|
жҳҖе°ҸеҖј
|
йўқе®ҡеҖј
|
жҳҖеӨ§еҖј
|
еҚ•дҪҚ
|
жқЎд»¶
|
|
дҪҚж—¶й—ҙ()1
|
tB
|
3.998
|
4.000
|
4.002
|
μs
|
250kbitвҲ•s
|
|
еҶ…йғЁе»¶иҝҹж—¶й—ҙ()2
|
tECU
|
0.0
|
|
0.9
|
μs
|
|
|
еҶ…йғЁз”өе®№еҖј()3
|
Cin
|
0
|
50
|
100
|
pF
|
250kbit/sпјҢ CAN
— H е’Ң CAN
—LзӣёеҜ№дәҺең°
|
|
е·®еҠЁеҶ…йғЁз”өе®№()3
|
Coff
|
0
|
25
|
50
|
pF
|
|
|
еҸҜз”Ёж—¶й—ҙ()4
|
tavail
|
2.5
|
|
|
μs
|
40зұізҡ„жҖ»зәҝй•ҝеәҰ
|
|
дҝЎеҸ·дёҠеҚҮгҖҒдёӢйҷҚж—¶й—ҙ
|
tR,tF
|
200
|
|
500
|
ns
|
д»ҺдҝЎеҸ·зҡ„ 10пј…еҲ° 90пј…еӨ„жөӢеҫ—
|
|
жіЁпјҡ 1пјҺеҢ…жӢ¬е…¶еҺҹе§ӢзҠ¶жҖҒеҸҠе…¶йҡҸжё©еәҰгҖҒж—¶ж•ҲзӯүеҸҳеҢ–зҡ„еҖјгҖӮ 2пјҺеҜ№дәҺдёҖдёӘд»ҺйҡҗжҖ§иҪ¬дёәжҳҫжҖ§зҡ„ Vdiff =1.0дјҸд»ҘеҸҠд»ҺжҳҫжҖ§иҪ¬дёәйҡҗжҖ§зҡ„ Vdiff =0.5дјҸзҡ„з”өеҺӢе·®пјҢеә”дҝқиҜҒ tECUзҡ„еҖјгҖӮд»ҺжіЁ 1зҡ„дҫӢеӯҗзҡ„дҪҚи®Ўж—¶жқҘзңӢпјҢиӢҘжңү 300nsзҡ„йў„з•ҷпјҢдёҖдёӘ CANжҺҘеҸЈе»¶иҝҹ 500nsжҳҜеҸҜиғҪзҡ„пјҲжҺ§еҲ¶еҷЁдёҚеҢ…жӢ¬еңЁеҶ…пјүгҖӮе…Ғи®ёжңүдёҖдёӘиҫғзј“зҡ„ж–ңзҺҮпјҲеӣҫ A1е’Ң A2дёӯзҡ„ R3е’Ң R4пјүд»ҘеҸҠиҫ“е…Ҙж»ӨжіўпјҲеӣҫ A1е’Ң A2дёӯзҡ„ R5гҖҒR6гҖҒC1гҖҒC2пјүгҖӮеҹәдәҺ EMCзҡ„иҖғиҷ‘жҺЁиҚҗдҪҝз”ЁиҜҘзү№еҫҒгҖӮжҳҖе°ҸеҶ…йғЁе»¶иҝҹж—¶й—ҙеҸҜиғҪдёә 0гҖӮжҳҖеӨ§е…Ғи®ёеҖјжҳҜз”ұдҪҚи®Ўж—¶е’ҢжҖ»зәҝ延иҝҹж—¶й—ҙеҶіе®ҡзҡ„гҖӮ 3пјҺйҷӨдәҶеҶ…йғЁз”өе®№д№ӢеӨ–пјҢжҖ»зәҝзәҝи·Ҝд№ҹеә”жңүдёҖдёӘе°ҪеҸҜиғҪдҪҺзҡ„з”өж„ҹгҖӮ Cin е’Ң Coffзҡ„жҳҖе°ҸеҖјеҸҜиғҪдёә 0пјҢжҳҖеӨ§зҡ„е…Ғи®ёеҖјз”ұдҪҚе®ҡж—¶е’ҢзҪ‘з»ңеёғеұҖеҸӮж•° Lе’Ң DпјҲеҸӮи§ҒиЎЁ 8пјүеҶіе®ҡгҖӮеҰӮжһңеңЁжҜҸдёӘеҚ•дёӘзҡ„ ECUдёӯпјҢдә§з”ҹзҡ„з”өзјҶе…ұжҢҜжіўжІЎжңүжҠ‘еҲ¶жҳҫжҖ§з”өе№іе·®дҪҺдәҺ Vdiff =1дјҸзҡ„дё”жІЎжңүеўһеӨ§йҡҗжҖ§з”өе№іе·®й«ҳдәҺ Vdiff =0.5дјҸзҡ„пјҲеҸӮи§ҒиЎЁ 3е’Ң 4пјүпјҢе°ұдҝқиҜҒдәҶжӯЈзЎ®зҡ„еҠҹиғҪжҖ§гҖӮжҳҖе°ҸеҶ…йғЁе»¶иҝҹж—¶й—ҙеҸҜиғҪдёә 0гҖӮжҳҖеӨ§е…Ғи®ёеҖјжҳҜз”ұдҪҚи®Ўж—¶е’ҢжҖ»зәҝ延иҝҹж—¶й—ҙеҶіе®ҡзҡ„гҖӮ 4пјҺеҸҜз”Ёж—¶й—ҙжҳҜз”ұйӣҶжҲҗз”өи·ҜеҚҸи®®зҡ„дҪҚи®Ўж—¶еҚ•дҪҚдә§з”ҹзҡ„гҖӮдҫӢеҰӮпјҢеңЁеӨ§еӨҡж•°йӣҶжҲҗз”өи·ҜжҺ§еҲ¶еҷЁдёӯзҡ„ж—¶й—ҙз¬ҰеҗҲ TSEG1гҖӮз”ұдәҺдёҚеҗҢжӯҘзҡ„еҺҹеӣ пјҢе®ғеҸҜиғҪдјҡдёўеӨұ SJWзҡ„й•ҝеәҰгҖӮеӣ жӯӨжңүдёҖдёӘдёҚеҗҢжӯҘзҡ„еҸҜз”Ёж—¶й—ҙпјҲ tavailпјүдёә
|
TSEG1-SJWжҜ«з§’гҖӮдёҖдёӘ 250nsзҡ„ tqж—¶й—ҙпјҢдё” SJW = 1tqпјҢTSEG1 = 13 tqпјҢTSEG2 = 2tqдҪҝеҫ— tavailпјқ3.00 nsгҖӮ
5пјҺдёәдәҶдҝқиҜҒиҜҘеҸӮ数并иҒ”зҡ„еҠ еңЁ ECUдёҠзҡ„ CAN_Hе’Ң CAN_Lй—ҙзҡ„иҙҹиҪҪеә”дёә 60ΩпјҢз”өе®№ 200 pFгҖӮ
4 еҠҹиғҪжҖ§жҸҸиҝ°
еҰӮеӣҫ 2жүҖзӨәпјҢжҖ»зәҝзҡ„зәҝи·ҜеңЁжҜҸдёӘжң«з«Ҝд»ҘиҙҹиҪҪз”өйҳ» RLз»“жқҹгҖӮиҝҷдәӣз»Ҳз«Ҝз”өйҳ»жҠ‘еҲ¶дәҶдҝЎеҸ·еңЁжҖ»зәҝеҶ…йғЁзҡ„еҸҚе°„гҖӮ
еҰӮжһңжҖ»зәҝдёҠжүҖжңү ECUзҡ„жҖ»зәҝеҸ‘йҖҒеҷЁйғҪеӨ„дәҺе…ій—ӯзҠ¶жҖҒпјҢйӮЈд№ҲжҖ»зәҝе°ұеӨ„дәҺйҡҗжҖ§зҠ¶жҖҒгҖӮеңЁиҝҷз§Қжғ…еҶөдёӢпјҢжҖ»зәҝе№іеқҮз”өеҺӢз”ұжҖ»зәҝдёҠжүҖжңү ECUдёӯзҡ„ж— жәҗеҒҸзҪ®з”өи·Ҝдә§з”ҹпјҢеӣҫ 2жҸҗдҫӣе®һзҺ°иҝҷдёӘжҺҘ收ж“ҚдҪңеҸӮиҖғзҡ„з”өйҳ»зҪ‘з»ңгҖӮ
еҰӮжһңиҮіе°‘жңүдёҖдёӘеҚ•е…ғзҡ„жҖ»зәҝй©ұеҠЁз”өи·ҜжҳҜжҺҘйҖҡзҡ„пјҢе°ұжңүдёҖдёӘжҳҫжҖ§дҪҚеҸ‘йҖҒз»ҷжҖ»зәҝгҖӮиҝҷдёӘжҳҫжҖ§дҪҚйҖҡиҝҮжҖ»зәҝз»Ҳз«Ҝз”өйҳ»иҖҢеңЁдёӨжқЎзәҝпјҲ CAN_Hе’Ң CAN_Lпјүд№Ӣй—ҙдә§з”ҹе·®еҠЁз”өеҺӢгҖӮжҳҫжҖ§е’ҢйҡҗжҖ§зҡ„зҠ¶жҖҒз”ұдёҠиҝ°зҡ„з”өйҳ»зҪ‘з»ңжқҘдј йҖ’пјҢжӯӨз”өйҳ»зҪ‘з»ңиҪ¬жҚўдёҚеҗҢжҖ»зәҝе·®еҠЁз”өеҺӢпјҢд»ҘеҜ№еә”жҺҘ收з”өи·ҜжҜ”иҫғеҷЁиҫ“е…Ҙз«ҜеҸҜиҜҶеҲ«зҡ„йҡҗжҖ§е’ҢжҳҫжҖ§з”өе№ігҖӮ
5з”өж°”зү№жҖ§
- 1з”өж°”еҸӮж•°
- еңЁжҜҸдёӘ ECUзҡ„е·ҘдҪңжё©еәҰиҢғеӣҙеҶ…еҝ…йЎ»е®Ңе…Ёз¬ҰеҗҲд»ҘдёӢеҗ„иЎЁдёӯзҡ„жҖ§иғҪеҸӮж•°гҖӮиҝҷдәӣеҸӮж•°ж»Ўи¶іжҳҖеӨҡжңү 30дёӘ ECUиҝһжҺҘеҲ°з»ҷе®ҡзҡ„жҖ»зәҝзҪ‘ж®өгҖӮ
- 1.1з”өжҺ§еҚ•е…ғеңЁиЎЁ 1еҲ°иЎЁ 4дёӯз»ҷе®ҡзҡ„иҝҷдәӣйҷҗеҲ¶еә”з”ЁдәҺжҜҸдёӘ ECUзҡ„ CAN_Hе’Ң CAN_Lз®Ўи„ҡпјҢиҝҷдәӣ ECU
- йғҪжҳҜд»ҺжҖ»зәҝдёҠж–ӯејҖзҡ„пјҲеҸӮи§Ғ第 6з« пјүгҖӮиЎЁ 2 д»ҺжҖ»зәҝдёҠж–ӯејҖзҡ„ ECUзҡ„ VCAN_Hе’Ң VCAN_Lзҡ„йҷҗеҲ¶
- 1.1.1з»қеҜ№жҳҖеӨ§йўқе®ҡеҖј
- иЎЁ 2дёӯз»ҷе®ҡзҡ„йҷҗеҲ¶жҳҜжҢҮ ECUдёҺжҖ»зәҝзӣёиҝһпјҢдё”дёҚжҚҹеқҸ收еҸ‘еҷЁз”өи·Ҝзҡ„з»қеҜ№жҳҖеӨ§зӣҙжөҒз”өеҺӢеҖјгҖӮе°Ҫз®ЎжӯӨиҝһжҺҘдёҚиғҪдҝқиҜҒжҳҜеңЁиҝҷдәӣжқЎд»¶дёӢж“ҚдҪңзҡ„пјҢд№ҹжІЎжңүж—¶й—ҙйҷҗеҲ¶пјҢеҸӘжҳҜеңЁдёҖж®өж—¶й—ҙд№ӢеҗҺпјҢж“ҚдҪң CAN зҡ„йӣҶжҲҗз”өи·Ҝе°ҶеҜјиҮҙ“иў«еҠЁй”ҷиҜҜ”гҖӮ
- 1.1.2зӣҙжөҒеҸӮж•°иЎЁ 3е’Ң 4е®ҡд№үдәҶеҲҶеҲ«з”ЁдҪңиЎЁзӨәд»ҺжҖ»зәҝдёҠж–ӯејҖдәҶзҡ„дёҖдёӘ ECUзҡ„йҡҗжҖ§е’ҢжҳҫжҖ§зҠ¶жҖҒзҡ„зӣҙжөҒеҸӮ
|
еҸӮж•°
|
з¬ҰеҸ·
|
жҳҖе°ҸеҖј
|
йўқе®ҡеҖј
|
жҳҖеӨ§еҖј
|
еҚ•дҪҚ
|
жқЎд»¶
|
|
жҳҖеӨ§з”өеҺӢ
|
VCAN_H
|
пјҚ3.0
|
|
16.0
|
V
|
йўқе®ҡз”өжұ з”өеҺӢ 12дјҸ
|
|
VCAN_L
|
пјҚ3.0
|
|
16.0
|
V
|
|
жҳҖеӨ§з”өеҺӢ
|
VCAN_H
|
пјҚ3.0
|
|
32.0
|
V
|
йўқе®ҡз”өжұ з”өеҺӢ 24дјҸ
|
|
VCAN_L
|
пјҚ3.0
|
|
32.0
|
V
|
ж•°гҖӮиЎЁ 3 д»ҺжҖ»зәҝдёҠж–ӯејҖдәҶзҡ„ ECUзҡ„жҳҫжҖ§е’ҢйҡҗжҖ§зҠ¶жҖҒзҡ„зӣҙжөҒеҸӮж•°
—йҡҗжҖ§зҠ¶жҖҒ
еҸӮж•° |
з¬ҰеҸ·
|
жҳҖе°ҸеҖј
|
йўқе®ҡеҖј
|
жҳҖеӨ§еҖј
|
еҚ•дҪҚ
|
жқЎд»¶
|
|
жҖ»зәҝз”өеҺӢиҫ“еҮәзү№жҖ§
|
VCAN_H
|
2.0
|
2.5
|
3.0
|
V
|
ж— иҙҹиҪҪ
|
|
VCAN_L
|
2.0
|
2.5
|
3.0
|
V
|
|
е·®еҠЁз”өеҺӢиҫ“еҮәзү№жҖ§
|
Vdiff_or
|
пјҚ1200
|
|
50
|
mV
|
ж— иҙҹиҪҪ
|
|
е·®еҠЁеҶ…йғЁз”өйҳ»
|
Rdiff
|
10
|
|
100
|
kΩ
|
ж— иҙҹиҪҪ
|
|
еҶ…йғЁз”өйҳ»(1)
|
Rin
|
5
|
|
15
|
kΩ
|
ж— иҙҹиҪҪ
|
|
е·®еҠЁз”өеҺӢиҫ“е…ҘиҢғеӣҙ
|
Vdiff
|
пјҚ1.0
|
|
0.5
|
V
|
(2)(3)(4)
|
|
1гҖҒCAN_Hе’Ң CAN_Lзҡ„еҶ…йғЁз”өйҳ» Rinеә”иҝ‘дјјдёәзӣёеҗҢеҖјпјҢзӣёдә’зҡ„еҒҸе·®еә”е°ҸдәҺ 5пј…гҖӮиҝҷж ·дә§з”ҹзҡ„еҜ№з§°дҝЎеҸ·жіўеҪўеҸҜе°Ҷ EMIиҫҗе°„еҮҸеҲ°жҳҖе°ҸгҖӮ 2гҖҒдёӨдёӘ并жҺҘеңЁ CAN_Hе’Ң CAN_Lд№Ӣй—ҙзҡ„з»Ҳз«Ҝз”өйҳ»зҡ„зӯүж•ҲеҖјдёә 60ΩгҖӮ 3пјҺжҺҘ收еҝ…йЎ»зЎ®дҝқжҳҜеңЁиЎЁ 5е’ҢиЎЁ 6дёӯеҲҶеҲ«е®ҡд№үзҡ„жӯЈеёёжЁЎејҸзҡ„з”өеҺӢиҢғеӣҙеҶ…гҖӮ 4пјҺе°Ҫз®ЎеҸӘжңүеңЁеҮәзҺ°ж•…йҡңзҡ„жғ…еҶөдёӢ VdiffпјңпјҚ1.0VжүҚжңүеҸҜиғҪпјҢе®ғд»Қеә”иў«и§ЈйҮҠдёәйҡҗжҖ§гҖӮ
|
иЎЁ 4 д»ҺжҖ»зәҝдёҠж–ӯејҖдәҶзҡ„ ECUзҡ„жҳҫжҖ§е’ҢйҡҗжҖ§зҠ¶жҖҒзҡ„зӣҙжөҒеҸӮж•°
—жҳҫжҖ§зҠ¶жҖҒ
еҸӮж•° |
з¬ҰеҸ·
|
жҳҖе°ҸеҖј
|
йўқе®ҡеҖј
|
жҳҖеӨ§еҖј
|
еҚ•дҪҚ
|
|
жқЎд»¶
|
|
жҖ»зәҝз”өеҺӢиҫ“еҮәзү№жҖ§
|
VCAN_H
|
3.0
|
3.5
|
5.0
|
V
|
(1)
|
|
|
VCAN_L
|
0.0
|
1.5
|
2.0
|
V
|
|
е·®еҠЁз”өеҺӢиҫ“еҮәзү№жҖ§
|
Vdiff_ld
|
1.5
|
2.0
|
3.0
|
|
V
|
(1)
|
|
е·®еҠЁз”өеҺӢиҫ“е…ҘиҢғеӣҙ
|
Vdiff
|
1.0
|
|
5.0
|
|
V
|
(1)(2)
|
|
1пјҺдёӨдёӘ并жҺҘеңЁ CAN_Hе’Ң CAN_Lд№Ӣй—ҙзҡ„з»Ҳз«Ҝз”өйҳ»зҡ„зӯүж•ҲеҖјдёә 60ΩгҖӮ 2пјҺжҺҘ收еҝ…йЎ»зЎ®дҝқжҳҜеҲҶеҲ«еңЁиЎЁ 5е’ҢиЎЁ 6дёӯе®ҡд№үзҡ„е…ұжЁЎз”өеҺӢиҢғеӣҙеҶ…гҖӮ
|
|
|
иЎЁ 5 жүҖжңүзҡ„ ECUиҝһжҺҘеңЁжҖ»зәҝдёҠж—¶иЎЁзӨәйҡҗжҖ§зҠ¶жҖҒзҡ„жҖ»зәҝз”өеҺӢеҸӮж•°
—йҡҗжҖ§зҠ¶жҖҒ
еҸӮж•° |
з¬ҰеҸ·
|
жҳҖе°ҸеҖј
|
йўқе®ҡеҖј
|
жҳҖеӨ§еҖј
|
еҚ•дҪҚ
|
жқЎд»¶
|
|
жҖ»зәҝз”өеҺӢ
|
VCAN_L
|
0.1
|
2.5
|
4.5
|
V
|
еҗҢжҜҸдёӘ ECUзҡ„жҺҘең°з«ҜеӨ„жөӢеҫ—
|
|
жҖ»зәҝе·®еҠЁз”өеҺӢ(1)
|
Vdiff
|
пјҚ400
|
0
|
12
|
mV
|
еңЁеҗҢжҖ»зәҝзӣёиҝһзҡ„жҜҸдёӘ ECUеӨ„жөӢеҫ—
|
|
1пјҺжҖ»зәҝе·®еҠЁз”өеҺӢжҳҜз”ұйҡҗжҖ§зҠ¶жҖҒдёӯзҡ„жүҖжңү ECUзҡ„иҫ“еҮәзү№жҖ§еҶіе®ҡзҡ„гҖӮеӣ жӯӨпјҢ Vdiffиҝ‘дјјдёә 0пјҲеҸӮи§ҒиЎЁ 3пјүгҖӮжҳҖе°ҸеҖјжҳҜз”ұдҝЎеҸ·дј иҫ“еҝ…йЎ»иғҪеӨҹиЎЁиҫҫдёҖдёӘжҳҫжҖ§зҠ¶жҖҒдҪҚзҡ„иҰҒжұӮеҶіе®ҡзҡ„пјҢиЎЁзӨәиҜҘжҳҫжҖ§зҠ¶жҖҒдҪҚзҡ„жҳҖе°Ҹз”өеҺӢдёә Vdiffпјқ 1.2дјҸгҖӮ
|
иЎЁ 6 жүҖжңүзҡ„ ECUиҝһжҺҘеңЁжҖ»зәҝдёҠж—¶иЎЁзӨәжҳҫжҖ§зҠ¶жҖҒзҡ„жҖ»зәҝз”өеҺӢеҸӮж•°
—жҳҫжҖ§зҠ¶жҖҒ
еҸӮж•° |
з¬ҰеҸ·
|
жҳҖе°ҸеҖј
|
йўқе®ҡеҖј
|
жҳҖеӨ§еҖј
|
еҚ•дҪҚ
|
жқЎд»¶
|
|
жҖ»зәҝз”өеҺӢ(1)
|
VCAN_H
|
|
3.5
|
7.0
|
V
|
еҗҢжҜҸдёӘ ECUзҡ„жҺҘең°з«ҜеӨ„жөӢеҫ—
|
|
VCAN_L
|
2.0
|
1.5
|
|
V
|
|
жҖ»зәҝе·®еҠЁз”өеҺӢ(2)
|
Vdiff
|
1.2
|
2.0
|
3.0
|
V
|
еңЁеҗҢжҖ»зәҝзӣёиҝһзҡ„жҜҸдёӘECUеӨ„жөӢеҫ—
|
|
|
|
|
5.0
|
V
|
еңЁд»ІиЈҒжңҹй—ҙ
|
|
1пјҺ VCAN_Hзҡ„жҳҖе°ҸеҖјжҳҜз”ұ VCAN_Lзҡ„жҳҖе°ҸеҖјеҠ дёҠ Vdiffзҡ„жҳҖе°ҸеҖјеҶіе®ҡзҡ„гҖӮ VCAN_Lзҡ„жҳҖеӨ§еҖјжҳҜз”ұ VCAN_Hзҡ„жҳҖеӨ§еҖјеҮҸеҺ» Vdiffзҡ„еҖјеҶіе®ҡзҡ„гҖӮ 2пјҺеҪ“ ECUеҠ иҪҪеҲ°зҪ‘з»ңдёӯж—¶пјҢз”ұдәҺ Rdiffзҡ„зјҳж•…пјҢжҖ»зәҝиҙҹиҪҪеўһеҠ пјҢд»ҺиҖҢ VdiffеҮҸе°ҸгҖӮVdiffзҡ„жҳҖе°ҸеҖјеҶіе®ҡдәҶжҖ»зәҝдёҠе…Ғи®ёеҠ иҪҪзҡ„ ECUзҡ„дёӘж•°гҖӮVdiffзҡ„жҳҖеӨ§еҖјз”ұд»ІиЈҒжңҹй—ҙзҡ„дёҠйҷҗеҖјжүҖе®ҡд№үгҖӮиҜҘеҚ•дёӘиҝҗиЎҢзҡ„ VdiffжҳҖеӨ§еҖјеҝ…йЎ»еӨ§дәҺ 3VгҖӮ
|
- 1.1.3дәӨжөҒеҸӮж•°иЎЁ 1е®ҡд№үдәҶ ECUзҡ„дәӨжөҒеҸӮж•°иҰҒжұӮгҖӮ
- 1.2жҖ»зәҝиҝҗиЎҢз”өеҺӢ
- еңЁжүҖжңүзҡ„ ECUпјҲ2еҲ° 30дёӘд№Ӣй—ҙпјүиҝһжҺҘеҲ°жӯЈзЎ®еёҰз»Ҳз«Ҝзҡ„жҖ»зәҝдёҠж—¶пјҢиЎЁ 5е’Ң 6дёӯжҢҮе®ҡзҡ„еҸӮж•°еқҮйҖӮз”ЁгҖӮжҖ»зәҝдёҠд»»ж„ҸдёӨдёӘ ECUд№Ӣй—ҙзҡ„жҳҖеӨ§е…Ғи®ёжҺҘең°еҒҸе·®еҖјдёә 2VгҖӮиҝҷдёӘжһҒз«Ҝзҡ„еҒҸе·®з”өеҺӢеҸ‘з”ҹеңЁжҳҫжҖ§зҠ¶жҖҒдёӯпјҲеҸӮи§ҒиЎЁ 6пјүгҖӮ
- 1.3йқҷз”өж”ҫз”өпјҲ ESDпјү
- ж №жҚ® GB/T××××гҖҠйҒ“и·ҜиҪҰиҫҶ -йқҷз”өж”ҫз”өдә§з”ҹзҡ„з”өйӘҡжү°иҜ•йӘҢж–№жі•гҖӢпјҢESDдҪҝз”Ё 15kVзҡ„йқҷз”өж”ҫз”өз”өеҺӢпјҢеҜ№д»ҺжҖ»зәҝдёҠж–ӯејҖж—¶зҡ„ CAN_Hе’Ң CAN_LиҝӣиЎҢжЈҖжөӢгҖӮ
- 1.4зү©зҗҶеұӮз”өи·ҜзӨәдҫӢжңүи®ёеӨҡж»Ўи¶іиҰҒжұӮзҡ„зү©зҗҶеұӮеҲҶз«Ӣз”өи·Ҝе’ҢйӣҶжҲҗз”өи·ҜгҖӮиҝҷдәӣз”өи·Ҝзҡ„зӨәдҫӢеҰӮйҷ„еҪ• AжүҖзӨәгҖӮ
- 2зү©зҗҶеӘ’д»ӢеҸӮж•°
- д»ҘдёӢз« иҠӮд»Ӣз»ҚдәҶз”өзјҶгҖҒз»Ҳз«Ҝе’ҢзҪ‘з»ңеёғеұҖзҡ„зү№еҫҒпјҲеҸӮи§ҒиЎЁ 7пјүгҖӮиЎЁ 7 еұҸи”ҪеҸҢз»һзәҝз”өзјҶзҡ„зү©зҗҶеӘ’д»ӢеҸӮж•°
- 2.1жҖ»зәҝзәҝи·Ҝ
- жҖ»зәҝзәҝи·Ҝз”ұдёҖжқЎ CAN_HгҖҒдёҖжқЎ CAN_Lе’ҢдёҖжқЎ CAN_SHLDеҜјзәҝз»„жҲҗгҖӮ CAN_Hеә”дёәй»„иүІпјҢиҖҢ CAN_Lдёәз»ҝиүІгҖӮеҸҰеӨ–пјҢз”өзјҶеҝ…йЎ»з¬ҰеҗҲд»ҘдёӢзҡ„еҹәжң¬иҰҒжұӮгҖӮ
- 2.2еёғеұҖ
|
еҸӮж•°
|
з¬ҰеҸ·
|
жҳҖе°ҸеҖј
|
йўқе®ҡеҖј
|
жҳҖеӨ§еҖј
|
еҚ•дҪҚ
|
жқЎд»¶
|
|
йҳ»жҠ—
|
Z
|
108
|
120
|
132
|
Ω
|
еұҸи”ҪжҺҘең°пјҢйҮҮз”ЁејҖпјҸзҹӯи·Ҝжі•з”Ё 3зұій•ҝеәҰиҜ•ж ·еңЁдёӨж №дҝЎеҸ·зәҝд№Ӣй—ҙд»Ҙ 1MHzдёӢжөӢеҫ—
|
|
еҚ•дҪҚз”өйҳ»
|
rb
|
0
|
25
|
50
|
mΩ/m
|
еңЁ 20в„ғж—¶жөӢеҫ—()1
|
|
еҚ•дҪҚзәҝ延иҝҹ
|
rp
|
|
5.0
|
|
ns/m
|
Vp 67пј…(2)
|
|
еҚ•дҪҚз”өе®№
|
Cb
|
0
|
40
|
75
|
pF/m
|
дёӨеҜјзәҝй—ҙ
|
|
Cs
|
0
|
70
|
110
|
pF/m
|
еҜјзәҝеҜ№еұҸи”Ҫ
|
|
з”өзјҶе°әеҜё
|
|
|
|
|
|
(3)
|
|
0.5 mm2зҡ„еҜјзәҝ
|
ac
|
0.508
|
|
|
mm2
|
(4)
|
|
з»қзјҳзӣҙеҫ„
|
dci
|
2.23
|
|
3.05
|
mm
|
|
|
з”өзјҶзӣҙеҫ„
|
dc
|
6.0
|
|
8.5
|
mm
|
|
|
0.8mm2зҡ„еҜјзәҝ
|
ac
|
0.760
|
|
|
mm2
|
(4)
|
|
з»қзјҳзәҝзӣҙеҫ„
|
dci
|
2.5
|
|
3.5
|
mm
|
|
|
з”өзјҶзӣҙеҫ„
|
dc
|
8.5
|
|
11.0
|
mm
|
|
|
еұҸи”Ҫж•ҲзҺҮ
|
|
|
200
|
225
|
mΩ/m
|
1е…Ҷиө«е…№еҸҠд»ҘдёӢйў‘зҺҮзҡ„иЎЁйқўиҪ¬з§»йҳ»жҠ—пјҢжҢү GB/T 17737.1зҡ„жөӢиҜ•ж–№ејҸ
|
|
жё©еәҰиҢғеӣҙ
|
C
|
пјҚ40
|
|
пјӢ125
|
в„ғ
|
еҠ зғӯиҖҒеҢ–пјҡжҢү IS0 6722пјҢ3000е°Ҹж—¶пјҢз”Ё 4пјҚ5еҖҚз”өзјҶзӣҙеҫ„зҡ„еҝғиҪҙжөӢиҜ•гҖӮ
|
|
з”өзјҶејҜжӣІеҚҠеҫ„
|
r
|
4еҖҚз”өзјҶзӣҙеҫ„
|
|
|
mm
|
з”өзјҶжІЎжңүжҖ§иғҪжҲ–зү©зҗҶдёҠжҚҹеқҸж—¶зҡ„ 90еәҰејҜжӣІеҚҠеҫ„гҖӮ
|
|
1пјҺз”ұжҺҘ收 ECUжЈҖжөӢзҡ„жҖ»зәҝз”өеҺӢе·®дҫқиө–дәҺе®ғиҮӘе·ұе’ҢеҸ‘е°„ ECUд№Ӣй—ҙзҡ„зәҝз”өйҳ»гҖӮеӣ жӯӨпјҢдҝЎеҸ·зәҝжҖ»з”өйҳ»з”ұжҜҸдёӘ ECUзҡ„жҖ»зәҝж ҮеҮҶеҸӮж•°йҷҗе®ҡгҖӮ 2пјҺжҖ»зәҝдёҠдёӨзӮ№й—ҙзҡ„жҳҖе°Ҹ延иҝҹж—¶й—ҙеҸҜиғҪдёә 0гҖӮжҳҖеӨ§еҖјжҳҜз”ұдҪҚж—¶й—ҙе’Ңдј иҫ“дёҺжҺҘ收з”өи·Ҝзҡ„延иҝҹж—¶й—ҙеҶіе®ҡзҡ„гҖӮ 3пјҺеҸҜд»ҘдҪҝз”Ёе…¶е®ғзҡ„еҜјзәҝи§„ж јгҖӮз»қзјҳе°әеҜёеҸҜиғҪиҰҒеӨ§дәҺ ISO 6722дёӯзҡ„规е®ҡгҖӮи®ҫи®Ўдәәе‘ҳеә”зЎ®дҝқз”өзјҶгҖҒиҝһжҺҘеҷЁдёҺз«Ҝеӯҗй—ҙзҡ„е…је®№жҖ§гҖӮ 4пјҺз¬ҰеҗҲ ISO 6722жҖ§иғҪиҰҒжұӮпјҲеҢ…жӢ¬еҸҜз”Ёзҡ„жі»жөҒзәҝпјүгҖӮ 5пјҺ 125в„ғжҲ–жҢү OEMжүҖжҢҮе®ҡзҡ„гҖӮ
|
иҜҘзҪ‘з»ңзҡ„зәҝи·ҜеёғеұҖеә”е°ҪеҸҜиғҪжҺҘиҝ‘зәҝжҖ§з»“жһ„д»ҘдҫҝдәҺйҒҝе…Қз”өзјҶиҫҗе°„гҖӮеңЁе®һйҷ…дёӯжңүеҝ…иҰҒйҮҮз”ЁиҝһжҺҘзҹӯзҡ„зҹӯжҲӘзәҝз”өзјҶеҲ°дё»е№Ізәҝз”өзјҶдёҠзҡ„пјҢеҰӮеӣҫ 7жүҖзӨәгҖӮдёәдәҶе°Ҷй©»жіўеҮҸеҲ°жҳҖе°‘пјҢзҪ‘з»ңдёҠиҠӮзӮ№зҡ„й—ҙйҡ”дёҚеә”зӣёзӯүдё”з”өзјҶзҹӯзәҝй•ҝеәҰпјҲеҰӮеӣҫ 7дёӯе°әеҜё Sпјүд№ҹдёҚе®Ңе…Ёзӯүй•ҝгҖӮзҪ‘з»ңе°әеҜёзҡ„иҰҒжұӮи§ҒиЎЁ 8жүҖзӨәгҖӮ
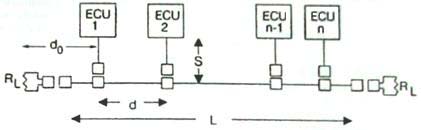
еӣҫ 7 жҺҘзәҝзҪ‘з»ңеёғеұҖиЎЁ 8 зҪ‘з»ңеёғеұҖеҸӮж•°
еҸӮж•° |
з¬ҰеҸ·
|
жҳҖе°ҸеҖј
|
йўқе®ҡеҖј
|
жҳҖеӨ§еҖј
|
еҚ•дҪҚ
|
жқЎд»¶
|
|
жҖ»зәҝй•ҝеәҰ
|
L
|
0
|
|
40
|
m
|
дёҚеҢ…жӢ¬з”өзјҶзҹӯжҲӘзәҝ
|
|
з”өзјҶзҹӯзәҝй•ҝеәҰ(1)
|
S
|
0
|
|
1
|
m
|
и§ҒжіЁ 1
|
|
иҠӮзӮ№и·қзҰ»
|
d
|
0.1
|
|
40
|
m
|
|
|
д»Һ RLиө·зҡ„жҳҖе°Ҹи·қзҰ»
|
d0
|
0
|
|
|
m
|
RLдёҚжҳҜдҪҚдәҺ ECUд№ӢеҶ…
|
|
1пјҺиҜҠж–ӯиҒ”з»“еҷЁз”өзјҶзҹӯжҲӘзәҝй•ҝеәҰпјҢйў„з•ҷз»ҷиҪҰиҫҶзҡ„жҳҖеӨ§еҖјдёә 0.66зұіпјҢйў„з•ҷз»ҷзҰ»зәҝиҜҠж–ӯи®ҫеӨҮзҡ„жҳҖеӨ§еҖјдёә 0.33зұігҖӮ
|
5.2.3з»Ҳз«Ҝз”өйҳ»
жҖ»зәҝзәҝи·Ҝзҡ„дё»е№Ізәҝзҡ„жҜҸз«ҜйғҪеҝ…йЎ»д»ҘдёҖдёӘеҗҲйҖӮзҡ„з”өйҳ»жқҘжҸҗдҫӣ CAN_Hе’Ң CAN_LеҜјзәҝзҡ„жӯЈзЎ®з»ҲжӯўгҖӮиҜҘз»Ҳз«Ҝз”өйҳ»еә”иҝһжҺҘеңЁ CAN_Hе’Ң CAN_LеҜјзәҝд№Ӣй—ҙгҖӮиҜҘз»Ҳз«Ҝз”өйҳ»зү№жҖ§еә”з¬ҰеҗҲиЎЁ 9дёӯ规е®ҡзҡ„гҖӮ
иЎЁ 9 з»Ҳз«Ҝз”өйҳ»еҸӮж•°
еҸӮж•° |
з¬ҰеҸ·
|
жҳҖе°ҸеҖј
|
йўқе®ҡеҖј
|
жҳҖеӨ§еҖј
|
еҚ•дҪҚ
|
жқЎд»¶
|
|
з”өйҳ»
|
RL
|
110
|
120
|
130
|
Ω
|
жҳҖе°ҸеҠҹиҖ— 400жҜ«з“Ұ(1)
|
|
з”өж„ҹ
|
|
|
|
1
|
μH
|
|
|
1пјҺеҒҮи®ҫ VCAN_Hдёә 16VгҖӮ
|
|
|
|
|
|
5.2.4еұҸи”Ҫз»ҲжӯўеұҸи”Ҫеә”д»ҘдёҖж №жҺҘзәҝз»“жқҹдё”е®ғд»…еңЁдёҖзӮ№еӨ„зӣҙжҺҘжҺҘең°гҖӮеұҸи”ҪжҺҘең°зӮ№йҖҡеёёзЎ®е®ҡзҡ„еҺҹеҲҷжҳҜпјҲжҢүйҮҚиҰҒжҖ§жҺ’еҲ—пјүпјҡ
- иҝһжҺҘеҲ°жҳҖе°Ҹзҡ„з”өеӯҗеҷӘеЈ°зӮ№еӨ„гҖӮ
- дҪҝз”Ёйҳ»жҠ—е°ҪеҸҜиғҪдҪҺзҡ„иҝһжҺҘгҖӮ
- йҮҮз”ЁдёҺзҪ‘з»ңдёӯеҝғжҳҖиҝ‘зҡ„иҝһжҺҘзӮ№жҺҘең°гҖӮ
жҖ»зәҝдёҠзҡ„жҜҸдёӘиҠӮзӮ№д№ҹйғҪеә”жҸҗдҫӣдёҖдёӘдҫӣйҖүжӢ©зҡ„жҺҘең°еұҸи”ҪзӮ№гҖӮ然иҖҢпјҢиҜҘ CAN_SHLDеҜјзәҝзҡ„иҝһжҺҘеҷЁеә”йҖҡиҝҮдёІиҒ”зҡ„з”өйҳ»е’Ңз”өе®№иҫҫеҲ°иҠӮзӮ№й—ҙзҡ„жҳҖдҪіжҺҘең°иҝһжҺҘгҖӮжҺЁиҚҗеҖјдёә Rпјқ1ΩеҸҠ Cпјқ
- 68µFгҖӮпјҲи§Ғеӣҫ A1е’Ң A2пјү
- 3иҝһз»“еҷЁеӣҫ 8жүҖзӨәзҡ„дёӨз§ҚиҝһжҺҘеҷЁиғҪеӨҹиЎЁзӨәжүҖжңүзҡ„зҪ‘з»ңжғ…еҶөгҖӮдёҖдёӘ ECUеҸҜиғҪдёҺдёҖдёӘеӣәе®ҡзҡ„жҺҘеӨҙпјҲйҷ„еҪ• CпјүжҲ–иҝһжҺҘеҷЁзӣёиҝһгҖӮеҰӮжһңз”ЁдёҖдёӘиҝһжҺҘеҷЁе°ҶдёҖдёӘ
ECUиҝһеҲ°зҪ‘з»ңдё»е№Ізәҝзәҝи·ҜдёҠпјҢеҲҷеҸҜз§°е®ғдёә“зҹӯжҲӘзәҝиҝһжҺҘеҷЁ”пјҢеңЁеӣҫ 8дёӯж ҮжҳҺдёә“A”гҖӮ“зҹӯжҲӘзәҝиҝһжҺҘеҷЁ”еҰӮеӣҫ 9жүҖзӨәгҖӮиӢҘиҝһжҺҘеҷЁз”ЁдәҺе°Ҷз»Ҳз«Ҝз”өйҳ»дёҺдё»е№Ізәҝз”өзјҶжң«з«ҜзӣёиҝһжҲ–з”ЁдәҺйҖҡиҝҮз»“жһ„иҫ№з•ҢпјҲдҫӢеҰӮй©ҫ驶е®ӨиҲұеЈҒпјүжҲ–з”ЁдәҺжү©еұ•дё»е№Ізәҝзәҝи·Ҝзҡ„з»Ҳз«ҜпјҢеҲҷз§°д№Ӣдёә“зӣҙйҖҡиҝһжҺҘеҷЁ”пјҢеңЁеӣҫ 8дёӯж ҮжҳҺдёә“B”гҖӮ“зӣҙйҖҡиҝһжҺҘеҷЁ”еҰӮеӣҫ 10жүҖзӨәгҖӮз”өзјҶе’ҢиҝһжҺҘеҷЁиҝһжҺҘжҲҗз»Ҳз«Ҝзҡ„ж–№жі•и§Ғйҷ„еҪ• B,дёӨж №з”өзјҶд№ҹеҸҜдёҚйҖҡиҝҮиҝһжҺҘеҷЁзӣҙжҺҘжҺҘз»ӯ(дҝ®еӨҚж—¶),жҺҘз»ӯж–№жі•и§Ғйҷ„еҪ• DгҖӮ
иҝҷдёӨз§ҚиҝһжҺҘеҷЁеңЁи®ҫи®ЎдёҠеҫҲзӣёдјјпјҢеҸӘжҳҜйҮҮз”ЁдәҶдёҚеҗҢзҡ„й”ҒжүЈеҪўејҸпјҢд»ҘйҒҝе…ҚеҜ№жӯЈзЎ®зҡ„йҖҡдҝЎжңүе®ізҡ„ж–№ејҸжқҘиҝһжҺҘзҪ‘з»ңзҡ„еҸҜиғҪжҖ§гҖӮиҜҘиҝһжҺҘеҷЁжҳҜдёә CAN_HгҖҒCAN_Lе’Ң CAN_SHLDжҸҗдҫӣзҡ„з”өж°”иҝһжҺҘз”Ёзҡ„гҖӮ
иҜҘиҝһжҺҘеҷЁжҰӮеҝөзҡ„дҪҝз”Ёе®һдҫӢеҰӮеӣҫ 8жүҖзӨәгҖӮ
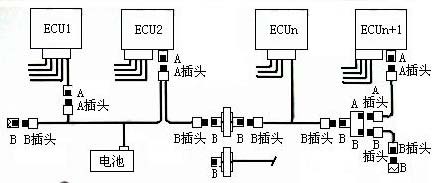
еӣҫ 8 зҪ‘з»ңиҝһжҺҘеҷЁз”Ёжі•е®һдҫӢ
- 3.1иҝһжҺҘеҷЁз”өжҖ§иғҪиҰҒжұӮ
- иҝһжҺҘеҷЁд»ҘеҸҠе®ғ们зҡ„иҝһжҺҘз»Ҳз«ҜиҰҒз¬ҰеҗҲиЎЁ 10дёӯ规е®ҡзҡ„з”өж°”иҰҒжұӮгҖӮиЎЁ 10иҝһжҺҘеҷЁеҸӮж•°
- 3.2иҝһжҺҘеҷЁзҡ„жңәжў°жҖ§иғҪ
|
еҸӮж•°
|
з¬ҰеҸ·
|
жҳҖе°ҸеҖј
|
йўқе®ҡеҖј
|
жҳҖеӨ§еҖј
|
еҚ•дҪҚ
|
жқЎд»¶
|
|
з”өеҺӢ(1)
|
VCAN_H
|
|
|
16
|
V
|
йўқе®ҡ VBATпјқ12дјҸ
|
|
VCAN_L
|
|
|
32
|
V
|
йўқе®ҡ VBATпјқ24дјҸ
|
|
з”өжөҒ
|
I
|
0
|
25
|
80
|
mA
|
|
|
еі°еҖјз”өжөҒ
|
Ip
|
|
|
500
|
mA
|
ж—¶й—ҙйҷҗеҲ¶пјҡ101tBпјү(1)
|
|
зү№жҖ§йҳ»жҠ—
|
ZC
|
100
|
120
|
140
|
Ω
|
|
|
дј иҫ“йў‘зҺҮ
|
f
|
25
|
|
|
MHz
|
|
|
жҺҘи§Ұз”өйҳ»
|
RT
|
|
|
10
|
mΩ
|
(2)
|
|
1пјҺжҖ»зәҝж•…йҡңгҖӮ 2пјҺз”ұжҺҘ收 ECUжЈҖжөӢзҡ„жҖ»зәҝзәҝи·Ҝз”өеҺӢе·®пјҢиҜҘжҺҘ收 ECUдҫқиө–дәҺе®ғиҮӘе·ұе’Ңдј иҫ“ ECUд№Ӣй—ҙзҡ„зәҝи·Ҝз”өйҳ»гҖӮеӣ жӯӨпјҢдҝЎеҸ·зәҝжҖ»з”өйҳ»з”ұжҜҸдёӘ ECUзҡ„жҖ»зәҝеҸӮж•°ж°ҙе№ійҷҗе®ҡгҖӮ
|
еҰӮйҮҮз”ЁдәҶиҝһжҺҘеҷЁпјҢиҝһжҺҘеҷЁеә”жңүз¬ҰеҗҲиҰҒжұӮзҡ„й”Ғй—ӯгҖҒеҒҸжҢҜе’ҢдҝқжҢҒиЈ…зҪ®гҖӮиҝҷдәӣиҝһжҺҘеҷЁиҝҳеә”иҜҘе…·дҪ“иЎЁзҺ°з¬ҰеҗҲеә”з”Ёзҡ„зҺҜеўғдҝқжҠӨжҺӘж–ҪгҖӮ“зҹӯжҲӘзәҝиҝһжҺҘеҷЁ”е’Ң“зӣҙйҖҡиҝһжҺҘеҷЁ”зҡ„е°әеҜёзү№жҖ§еҲҶеҲ«зӨәдәҺеӣҫ 9е’Ңеӣҫ 10гҖӮ
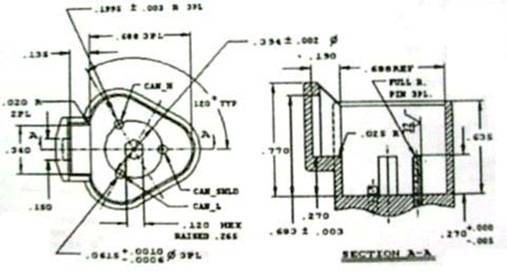
2 еЎ‘ж–ҷйўқе®ҡжё©еәҰдёә-55в„ғеҲ°+125в„ғ“зҹӯжҲӘзәҝиҝһжҺҘеҷЁ”зҡ„жҺҘеҸЈе°әеҜё 1 й’ҲеӨҙжҳҜй•ҖйҮ‘й“ңзҡ„
еӣҫ 9 “зҹӯжҲӘзәҝиҝһжҺҘеҷЁ”пјҲй’ҲзҠ¶иҝһжҺҘеҷЁпјүзҡ„е°әеҜёпјҲ Aпјү
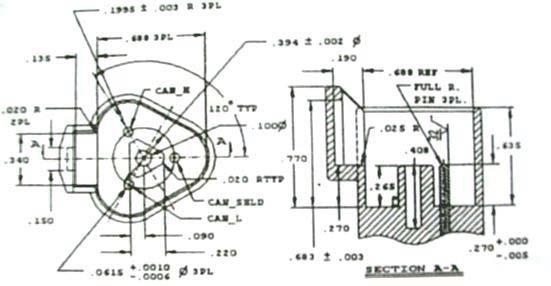
2 еЎ‘ж–ҷйўқе®ҡжё©еәҰдёә-55в„ғеҲ°+125в„ғ“зӣҙйҖҡиҝһжҺҘеҷЁ”зҡ„жҺҘеҸЈе°әеҜё 1 й’ҲеӨҙжҳҜй•ҖйҮ‘й“ңзҡ„
еӣҫ 10“зӣҙйҖҡиҝһжҺҘеҷЁ”пјҲеӯ”зҠ¶иҝһжҺҘеҷЁпјүе°әеҜёпјҲ Bпјү
SAE1939-11-GB-01SAE1939-11е•Ҷз”ЁиҪҰжҺ§еҲ¶зі»з»ҹеұҖеҹҹзҪ‘з»ң-CAN,жҖ»зәҝ,йҖҡдҝЎеҚҸи®®

 400-878-1895
400-878-1895





