|
序号
|
项目名称
|
数量
|
品牌
|
|
1
|
四自由度工业型机械手
|
5
|
同创
|
|
2
|
四自由度工业型伺服直角坐标机器人立体仓储系统
|
5
|
同创
|
|
3
|
四自由度工业型平面关节式机器人
|
1
|
同创
|
|
4
|
六自由度工业机器人实训装置
|
1
|
同创
|
|
5
|
台式电脑
|
12
|
联想
|
|
6
|
实验桌
|
12
|
同创
|
|
7
|
讲台
|
1
|
同创
|
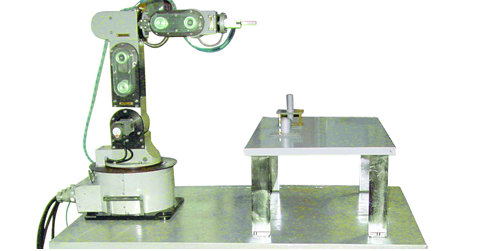
机器人创新实训装置一:
TC-JXS4型四自由度机械手
1、系统设计思想
为了适应市场的需要,满足教学要求,使学生能够掌握机器人的结构、功能、特点。我公司新研发了模块化多控制式组合机器人。这种模块化机器人不仅继承了传统单一本体结构机器人的所有教学实验内容,而且增加了更多更实际的教学课程,可进行机器人机构、原理、传动、控制等教学。不仅实现了机器人控制的多样化,教学的丰富化,更是教学机器人的主要发展方向。四自由度机械手是实际工业现场应用的典型结构。综合应用了步进电机驱动,伺服电机驱动,辅助滚珠丝杆,气动及PLC、PC技术进行控制,是现代机器人自动化应用的基础构成之一。
2、系统特色
系统采用模块式设计,组合拆装方便,学生可根据教学要求任意组合其中两个或多个模块,从而搭建成2-4自由度教学机器人。控制系统可视化,控制柜人因工程设计,满足机电设备拆装教学需要。
系统开放:基于运动PLC控制平台,以及PC机控制,程序全部免费提供,整体控制灵活,方便二次开发,学生可根据需要进行机电控制系统的应用自主编程并上传调试。
配套齐全:硬件配置一体式电控柜,气动系统,并配套完善的实验指导书。
3、实训内容
1、机械:装置的机械安装与位置调整;机器人机械本体拆装实验
2、气动:气动系统与元件应用实验
3、电气:电器元件的布线;控制线路设计与连接实验
4、机器人控制器原理与应用:
5、机器人机械系统设计与认知
6、伺服系统实验
7、步进系统实验
8、寻零操作实验
9、点位控制实验
10、轨迹跟踪系统实验
11、重复定位控制
12、机器人模块组合多种控制实验
13、PLC原理与应用实验
14、PLC编程操作实验
注明:四自由度机器人可同时满足2-4名学生进行实验。
4、四自由度机器人系统主要配置及技术参数表
|
主要配置
|
主要技术参数
|
|
直角坐标机械手机械本体
|
1.结构形式:直角坐标结构
2.自由度:4自由度
3.运动驱动采用步进/伺服电机驱动。
4.最大动作范围:1轴:0°~120°;2轴:0~300mm;
3轴:0~150mm ; 4轴:0°~120°。
5.各模块动作速度:2轴、3轴速度:20mm/s
1轴、4轴速度:10°/s
6. 重复定位精度:±0.5mm
7. 负载:1Kg
|
|
控制系统
|
1. 多控制系统采用电控挂板与机械手实验桌分离式与可视化结构。
2.多控制系统(包含:PC控制、PLC控制等控制方式)。
控制系统采用Windows操作系统。
|
|
控制软件
|
1.软件开发;
2.开放二次开发函数与部分源代码,可二次开发。
|
|
计算机
|
惠普,CPU 2GHz。内存2G,硬盘320G
|
|
气动手爪
|
亚德客品牌
|
|
附件
|
1.实验工件
2. 配套实验指使用说明书
|
机器人创新实训装置二:
TC-JQR4型四自由度伺服直角坐标机器人立体仓储系统

1 、四自由度伺服直角坐标机器人系统介绍
四自由度伺服直角坐标机器人,末端气动手爪,配置立体化仓库,进行抓取出入库作业。机器人本体按照工业直角坐标机器人结构设计,体现机器人基础形式的功能和特点。
PLC主机、继电器等电控元件与布线布置在挂板背面,门式控制按钮与端子板,内部结构与位置完全可视;并配备防护和标识。
2、多控制四自由度器人系统主要配置及技术参数表
|
主要配置
|
主要技术参数
|
|
直角坐标机械手机械本体
|
1.结构形式:直角坐标结构
2.自由度:4自由度
3.驱动方式:步进\伺服电机驱动(日本松下伺服电机)
4.最大动作范围:1轴:0~300mm ;2轴:0°~90°;
3轴:0~300mm;4轴:0~150mm 。
5.各模块动作速度:1轴、2轴、3轴速度:20mm/s
4轴速度:10°/s
6. 重复定位精度:±0.5mm
7. 负载:1Kg
|
|
控制系统
|
1.多控制系统采用电控挂板与机械手实验桌分离式与可视化结构。
2.多控制系统(包含:PC控制、PLC控制等控制方式)。
PLC:西门子;控制系统采用Windows操作系统。
|
|
控制软件
|
1.软件开发;
2.开放二次开发函数与部分源代码,可二次开发。
|
|
计算机
|
惠普,CPU 2GHz。内存2G,硬盘320G
|
|
立体化仓库
|
三行三列
|
|
附件
|
1.实验工件
2. 配套实验指导书及使用说明书
|
3、四自由度全伺服直角坐标机器人机械本体组成
四自由度全伺服直角坐标机器人由三组结构一致直线型步进/伺服驱动电控平移台与一组步进驱动电控旋转台通过连接板组合而成。直线平移台采用步进/伺服电机驱动,丝杠螺母副传动,支撑型直线导轨支撑。
4、四自由度机器人控制系统简介
多控制模块化四自由度机器人分三种控制方式:PC控制、PLC控制。同时,配备实验安全保护系统。
计算机配置要求:PLC与通用计算机相连,实现计算机程序控制。软件平台:Windows 2000 professional、Windows 2000
server、Windows XP。
5、四自由度机器人主要实验内容
该系统为学生提供一个开放性、创新性的实验平台,通过对典型机电产品的亲自组装、调试和应用开发等创新实验,让学生全面掌握机电一体化技术的应用和集成技术,帮助学生从系统整体角度去认识系统各组成部分,从而掌握机电控制系统的组成、功能及控制原理;掌握机械传动部件的选择,结构件的设计,传感器的选择和使用,电机的选择和使用,计算机编程和调试等,使学生对机电系统的设计,装配,调试能力均能得到综合训练。
Ø 机器人机械系统设计与认知
Ø 机器人机械本体拆装实验
Ø 机器人控制器原理与应用
Ø 伺服系统实验
Ø 步进系统实验
Ø 寻零操作实验
Ø 点位控制实验
Ø 轨迹跟踪系统实验
Ø 机器人模块组合多种控制实验
Ø PLC原理与应用实验
Ø PLC编程操作实验
注明:四自由度机器人可同时满足5-10名学生进行实验。
机器人创新实训装置三:
TC-JQRP型四自由度平面关节式(SCARA型)机器人

一、产品描述
该训练装置的目的是训练斯卡拉(scara)机器人控制技术, SCARA机械手结构紧凑、简单,可以应用于需要高效率的装配、焊接、密封、搬运和拿放等众多应用,具有高刚性、高精度、高速度、安装空间小、设计自由度大的优点。它比多轴定位平台的工作循环时间短很多,大大提高了工作效率。由于组成的部件少,因此工作更加可靠,减少维护。
二、主要特点
该装置主要是模拟一个不同材质物料的分拣过程控制系统,供料单元提供三种不同材质和颜色的小型工件,由料缸将工件推到传输带上,传输带上部安放了不同的传感器,对工件的材质、颜色等物理特性进行检测,斯卡拉机器人根据传感器的判别迅速将工件进行分类存放。
三、主要技术指标:
|
结构形式
|
平面关节式(SCARA型)
|
|
负载能力
|
3.0Kg
|
|
驱动方式
|
全步进电机驱动
|
|
重复定位精度
|
±0.1mm
|
|
每轴最大运动范围
|
关节1
|
0°~180°
|
|
关节2
|
0°~180°
|
|
关节3
|
0mm~50mm
|
|
关节4
|
0°~360°
|
|
每轴最大运动速度
|
关节1
|
60°/S
|
|
关节2
|
60°/S
|
|
关节3
|
40mm/S
|
|
关节4
|
120°/S
|
|
最大展开半径
|
470mm
|
|
高度
|
505mm
|
|
本体重量
|
≤40Kg
|
|
操作方式
|
示教再现/编程
|
|
供电电源
|
单相220V、50Hz
|
实训内容
Ø SCARA机器人的认识与工业应用
Ø SCARA机器人机械系统
Ø SCARA机器人控制系统
Ø SCARA机器人示教编程及再现控制
Ø SCARA机器人坐标系的建立
Ø SCARA机器人正运动学分析
Ø SCARA机器人逆运动学分析
Ø SCARA机器人关节运动轨迹规划
Ø SCARA机器人PTP(点到点)运动轨迹控制
Ø SCARA机器人CP(连续轨迹)运动控制
Ø SCARA机器人的搬运实验
Ø 机器人故障诊断与处理
Ø 机器人使用与维护
机器人创新实训装置四:
TC-GJQR6型六自由度工业机器人实训装置

一、产品描述
实验装置采用工业机器人;模拟机器人在工业现场的工作环境以及状态(散件组装成品,拿取等)。自由度通用工业机械手机器人,采用垂直多关节串连星形减速关节结构,伺服电机驱动,控制精度高,性能稳定。垂直多关节串连结构,运行灵活,主要应用于工业生产中焊接,工业喷漆,涂胶,切割、等作业。产品主要用于机床、家电、汽车、摩托车、轻工等行业部件的搬运、弧焊、涂胶、喷涂、切割、装卸和搬运、教学、科研等领域。今后该产品将广泛应用,市场前景广阔。主要用于、家电、汽车、摩托车、轻工等行业零部件的搬运、弧焊、涂胶、喷涂、切割、教学、科研等领域。
二、特点:
驱动方式:步进电机与伺服电机混合驱动
示教再现+人工编程;
封装要求:主要关节及传动部分采用透明式封装,机构可视便于教学;
控制系统采用Windows系列操作系统,适于教学实验;
提供理论教材、实验指导书等相关教材,用户可以从中选择相关内容以满足不同层次的教学实验需要;
相关配置:机器人本体,末端气动手爪、一体式控制柜、运动控制卡、控制软件、 装备样件等
三、技术指标
|
结构形式
|
串联关节式
|
|
驱动方式
|
步进伺服混合驱动
|
|
负载能力
|
3Kg
|
|
重复定位精度
|
±0.1mm
|
|
运动范围
|
θ1
|
θ2
|
θ3
|
θ4
|
θ5
|
θ6
|
|
300°
|
90°
|
120°
|
180°
|
180°
|
360°
|
|
每轴最大运动速度
|
关节1(腰转)
|
60°/S
|
|
关节2(大臂摆)
|
60°/S
|
|
关节3(小臂摆)
|
60°/S
|
|
关节4(臂转)
|
60°/S
|
|
关节5(腕摆)
|
60°/S
|
|
关节6(腕转)
|
120°/S
|
|
最大展开半径
|
610mm
|
|
高度
|
850mm
|
|
本体重量
|
≤40Kg
|
|
操作方式
|
示教再现/编程
|
|
供电电源
|
单相220V、50Hz
|
提供的文档与资料
1.使用说明书
2.实验指导书
3.软件使用说明书
4.控制软件
实训内容
Ø 机器人的认识;
Ø 机器人机械系统认识;
Ø 机器人控制系统认识;
Ø 机器人示教编程和再现控制;
Ø 机器人坐标系的建立;
Ø 机器人正运动学分析;
Ø 机器人逆运动学分析;
Ø 机器人关节运动轨迹规划;
Ø 机器人点到点运动轨迹控制;
Ø 机器人的搬运、装配实验。
Ø 单一模块可独立运行实验
Ø 模块机械本体可进行拆卸和装配实验
Ø 电控元件认知与接线实验
Ø 多种控制转换编程与操作实验
实验工作平台
配备12台实验工作平台,1台教师平台。
要求:
1、外形尺寸:约2000mm(长)×800mm(宽)×800mm(高)
2、实验工作平台需备有电脑柜,显示器可隐含到实验工作平台内,带有工具柜(抽屉)等,钢体结构,稳固耐用,外形美观。
3、主流品牌商务电脑(12台)
 收藏灵猫网
收藏灵猫网