тЪ║С║јтіеТђЂТеАтъІуџёуЏ┤ТјЦУйгуЪЕТјДтѕХТіђТю»С╗┐уюЪтѕєТъљ
1уЏ┤ТјЦУйгуЪЕТјДтѕХуџётЪ║ТюгтјЪуљєтЈіУДётЙІ
уЏ┤ТјЦУйгуЪЕТјДтѕХу│╗у╗Ъу«ђуД░DTC№╝ѕDirect Torque Control№╝Ѕу│╗у╗Ъ№╝їТў»у╗ДуЪбжЄЈТјДтѕХу│╗у╗ЪС╣ІтљјтЈЉт▒ЋУхиТЮЦуџётЈдтцќСИђуДЇжФўтіеТђЂТђДУЃйуџёС║цТхЂућхтіеТю║тЈўтјІтЈўжбЉУ░ЃжђЪу│╗у╗Ъсђѓтюет«ЃуџёУйгжђЪуј»жЄїжЮбтѕЕућеУйгуЪЕтЈЇждѕуЏ┤ТјЦТјДтѕХућхТю║уџёућхуБЂУйгуЪЕ№╝їтЏаТГцУђїтЙЌтљЇСИ║уЏ┤ТјЦУйгуЪЕТјДтѕХсђѓ
1.1уЏ┤ТјЦУйгуЪЕТјДтѕХу│╗у╗ЪтјЪуљєСИјуЅ╣уѓ╣
тдѓтЏЙ1-1СИ║уЏ┤ТјЦУйгуЪЕТјДтѕХуџётјЪуљєТАєтЏЙ№╝їтњїVCу│╗у╗ЪСИђТаи№╝їт«ЃС╣ЪТў»тѕєтѕФТјДтѕХт╝ѓТГЦућхтіеТю║уџёУйгжђЪтњїуБЂжЊЙ№╝їУйгжђЪУ░ЃУіѓтЎеASRуџёУЙЊтЄ║СйюСИ║ућхуБЂУйгуЪЕуџёу╗Ўт«џС┐АтЈи №╝їтюетљјжЮбУ«Йуй«УйгуЪЕТјДтѕХтєЁуј»№╝їт«ЃтЈ»С╗ЦТіЉтѕХуБЂжЊЙтЈўтїќт»╣С║јУйгуЪЕуџётй▒тЊЇ№╝їС╗јУђїСй┐тЙЌУйгжђЪтњїуБЂжЊЙу│╗у╗Ът«ъуј░УДБУђдсђѓтЏаТГц№╝їС╗јТЋ┤СйЊТјДтѕХу╗ЊТъёСИіТЮЦуюІ№╝їуЏ┤ТјЦУйгуЪЕТјДтѕХ№╝ѕDTC№╝Ѕу│╗у╗ЪтњїуЪбжЄЈТјДтѕХу│╗у╗Ъ№╝ѕVC№╝Ѕу│╗у╗ЪТў»СИђУЄ┤уџёжЃйУјитЙЌС║єУЙЃжФўУ┤ежЄЈуџётіеТђЂТђДУЃйС╗ЦтЈіжЮЎТђЂТђДУЃйсђѓ
№╝їтюетљјжЮбУ«Йуй«УйгуЪЕТјДтѕХтєЁуј»№╝їт«ЃтЈ»С╗ЦТіЉтѕХуБЂжЊЙтЈўтїќт»╣С║јУйгуЪЕуџётй▒тЊЇ№╝їС╗јУђїСй┐тЙЌУйгжђЪтњїуБЂжЊЙу│╗у╗Ът«ъуј░УДБУђдсђѓтЏаТГц№╝їС╗јТЋ┤СйЊТјДтѕХу╗ЊТъёСИіТЮЦуюІ№╝їуЏ┤ТјЦУйгуЪЕТјДтѕХ№╝ѕDTC№╝Ѕу│╗у╗ЪтњїуЪбжЄЈТјДтѕХу│╗у╗Ъ№╝ѕVC№╝Ѕу│╗у╗ЪТў»СИђУЄ┤уџёжЃйУјитЙЌС║єУЙЃжФўУ┤ежЄЈуџётіеТђЂТђДУЃйС╗ЦтЈіжЮЎТђЂТђДУЃйсђѓ
тЏЙ1-1уЏ┤ТјЦУйгуЪЕТјДтѕХу│╗у╗ЪтЏЙ
С╗јтЏЙСИГСИГтЈ»С╗ЦуюІтЄ║№╝їуЏ┤ТјЦУйгуЪЕТјДтѕХу│╗у╗Ъ№╝їт░▒Тў»жђџУ┐ЄСй┐т«џУйгтГљуБЂжЊЙ уџёт╣Ётђ╝С┐ЮТїЂТЂњт«џ№╝їуёХтљјжђЅТІЕтљѕуљєуџёжЏХуЪбжЄЈуџёСйюућеТгАт║ЈтњїСйюућеТЌХт«й№╝їС╗ЦУ░ЃУіѓт«џтГљуБЂжЊЙуЪбжЄЈуџёУ┐љтіежђЪт║д№╝їС╗јУђїТћ╣тЈўуБЂжђџУДњуџётцДт░Ј№╝їС╗Цт«ъуј░т»╣ућхТю║УйгуЪЕуџёТјДтѕХсђѓтюеуЏ┤ТјЦУйгуЪЕТјДтѕХТіђТю»СИГ№╝їтЁХтЪ║ТюгТјДтѕХТќ╣Т│Ћт░▒Тў»жђџУ┐ЄућхтјІуЕ║жЌ┤уЪбжЄЈТЮЦТјДтѕХт«џтГљуБЂжЊЙуџёТЌІУйгжђЪт║д№╝їТјДтѕХт«џтГљуБЂжЊЙУх░Ух░тЂютЂю№╝їС╗ЦТћ╣тЈўт«џтГљуБЂжЊЙуџёт╣│тЮЄТЌІУйгжђЪт║дуџётцДт░Ј№╝їС╗јУђїТћ╣тЈўуБЂжђџУДњуџётцДт░Ј№╝їС╗ЦУЙЙтѕ░ТјДтѕХућхтіеТю║УйгуЪЕуџёуЏ«уџёсђѓ
уџёт╣Ётђ╝С┐ЮТїЂТЂњт«џ№╝їуёХтљјжђЅТІЕтљѕуљєуџёжЏХуЪбжЄЈуџёСйюућеТгАт║ЈтњїСйюућеТЌХт«й№╝їС╗ЦУ░ЃУіѓт«џтГљуБЂжЊЙуЪбжЄЈуџёУ┐љтіежђЪт║д№╝їС╗јУђїТћ╣тЈўуБЂжђџУДњуџётцДт░Ј№╝їС╗Цт«ъуј░т»╣ућхТю║УйгуЪЕуџёТјДтѕХсђѓтюеуЏ┤ТјЦУйгуЪЕТјДтѕХТіђТю»СИГ№╝їтЁХтЪ║ТюгТјДтѕХТќ╣Т│Ћт░▒Тў»жђџУ┐ЄућхтјІуЕ║жЌ┤уЪбжЄЈТЮЦТјДтѕХт«џтГљуБЂжЊЙуџёТЌІУйгжђЪт║д№╝їТјДтѕХт«џтГљуБЂжЊЙУх░Ух░тЂютЂю№╝їС╗ЦТћ╣тЈўт«џтГљуБЂжЊЙуџёт╣│тЮЄТЌІУйгжђЪт║дуџётцДт░Ј№╝їС╗јУђїТћ╣тЈўуБЂжђџУДњуџётцДт░Ј№╝їС╗ЦУЙЙтѕ░ТјДтѕХућхтіеТю║УйгуЪЕуџёуЏ«уџёсђѓ
С╗јС╗ЦСИіС╗Іу╗ЇТѕЉС╗гтЈ»С╗ЦС║єУДБтѕ░DTCу│╗у╗ЪтюетЁиСйЊТјДтѕХТќ╣Т│ЋСИіуџёСИђС║ЏуЅ╣уѓ╣№╝џ
РЉ┤УйгуЪЕтњїуБЂжЊЙуџёТјДтѕХжЄЄућетЈїСйЇт╝ЈТјДтѕХтЎе№╝їт╣ХтюеPWMуџёжђєтЈўтЎеСИГуЏ┤ТјЦућеУ┐ЎСИцСИфТјДтѕХС┐АтЈиС║ДућЪућхтјІуџёSVPWMТ│бтйб№╝їС╗јУђїжЂ┐т╝ђС║єт░єт«џтГљућхТхЂтѕєУДБТѕљУйгуЪЕтњїуБЂжЊЙтѕєжЄЈ№╝їуюЂтј╗С║єТЌІУйгтЈўТЇбтњїућхТхЂТјДтѕХ№╝їу«ђтїќС║єТјДтѕХтЎеуџётДљу╗ЊТъёсђѓ
РЉхжђЅТІЕт«џтГљуБЂжЊЙСйюСИ║УбФТјДтѕХжЄЈ№╝їУђїСИЇтЃЈVCу│╗у╗ЪСИГжѓБТаижђЅТІЕТЌІУйгуБЂжЊЙ№╝їУ┐ЎТаиСИђТЮЦ№╝їУ«Ау«ЌуБЂжЊЙуџёТеАтъІтЈ»С╗ЦСИЇтЈЌУйгтГљтЈѓТЋ░тЈўтїќуџётй▒тЊЇ№╝їТЈљжФўС║єТјДтѕХу│╗у╗Ъуџёж▓ЂТБњТђДсђѓтдѓТъюС╗јТЋ░тГдТеАтъІТјДтѕХуџёУДётЙІ№╝їТўЙуёХУдЂТ»ћУйгтГљуБЂжЊЙт«џтљЉТЌХтцЇТЮѓуџётцџсђѓ
РЉХућ▒С║јжЄЄућеС║єуЏ┤ТјЦУйгуЪЕТјДтѕХ№╝їтюетЄЈжђЪТѕќУ┤ЪУййтЈўтїќуџётіеТђЂУ┐ЄуеІСИГ№╝їтЈ»С╗ЦУјитЙЌт┐ФжђЪуџёУйгуЪЕтЊЇт║ћ№╝їСйєт┐ЁжА╗Т│еТёЈжЎљтѕХУ┐ЄтцДуџётє▓тЄ╗ућхТхЂ№╝їС╗ЦтЁЇТЇЪтЮЈтіЪујЄт╝ђтЁ│тЎеС╗Х№╝їтЏаТГцт«ъжЎЁуџёУйгуЪЕтЊЇт║ћС╣ЪТў»ТюЅжЎљуџёсђѓ
1.2уЏ┤ТјЦУйгуЪЕу│╗у╗ЪуџёТјДтѕХУДётЙІтњїтЈЇждѕу│╗у╗Ъ
тюеDTCу│╗у╗ЪСИГжЄЄућеуџёТў»СИцуЏИжЮЎТГбтЮљТаЄ№╝ѕ╬▒╬▓тЮљТаЄ№╝Ѕ№╝їСИ║С║єу«ђтїќТЋ░тГдТеАтъІ№╝їућ▒СИЅуЏИтЮљТаЄтЈўТЇбТѕљСИцуЏИТў»жЮътИИжЄЇУдЂуџё№╝їТЅђС╗ЦтЈ»С╗ЦжЂ┐т╝ђТЌІУйгтЈўТЇбсђѓућ▒т╝Ј№╝ѕ1-1№╝Ѕтњїт╝Ј№╝ѕ1-2№╝ЅтЈ»тЙЌ
 №╝ѕ1-1№╝Ѕ
№╝ѕ1-1№╝Ѕ
 №╝ѕ1-2№╝Ѕ
№╝ѕ1-2№╝Ѕ
уД╗жА╣т╣ХуД»тѕєтљјтЙЌ
 №╝ѕ1-3№╝Ѕ
№╝ѕ1-3№╝Ѕ
 №╝ѕ1-4№╝Ѕ
№╝ѕ1-4№╝Ѕ
т╝Ј№╝ѕ1-3№╝Ѕтњїт╝Ј№╝ѕ1-4№╝Ѕт░▒Тў»тЏЙ1-1СИГТЅђжЄЄућеуџёт«џтГљуБЂжЊЙТеАтъІ№╝їтЁХу╗ЊТъёТАєтЏЙтдѓтЏЙ2-2ТЅђуц║сђѓт«ЃжђѓтљѕС║јСИГСйјжђЪТЌХтѕЄТЇбтѕ░ућхТхЂТеАтъІ№╝їУ┐ЎТў»СИіУ┐░УЃйТЈљжФўж▓ЂТБњТђДуџёС╝ўуѓ╣т░▒СИЇтЙЌСИЇСИбт╝Ѓсђѓ


тЏЙ2-2 т«џтГљуБЂжЊЙТеАтъІу╗ЊТъёТАєтЏЙ
тюеСИцуЏИжЮЎТГбтЮљТаЄу│╗СИіуџёућхуБЂУйгуЪЕУАеУЙЙт╝ЈСИ║
 №╝ѕ1-5№╝Ѕ
№╝ѕ1-5№╝Ѕ
ТЋ┤уљєтЈ»тЙЌ
 №╝ѕ1-6№╝ЅУ┐Ўт░▒Тў»DTCу│╗у╗ЪТЅђућеуџёу│╗у╗ЪТеАтъІ№╝їу╗ЊТъётЏЙтдѓтЏЙ1-3ТЅђуц║сђѓ
№╝ѕ1-6№╝ЅУ┐Ўт░▒Тў»DTCу│╗у╗ЪТЅђућеуџёу│╗у╗ЪТеАтъІ№╝їу╗ЊТъётЏЙтдѓтЏЙ1-3ТЅђуц║сђѓ
тЏЙ1-3 УйгуЪЕТеАтъІу╗ЊТъёТАєтЏЙ
2у│╗у╗ЪС╗┐уюЪтѕєТъљ
2.1С╗┐уюЪТеАтъІуџёт╗║уФІ
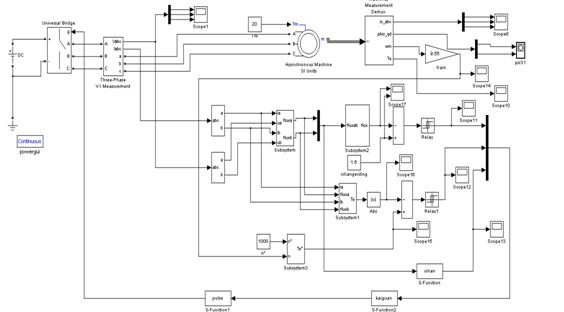
Та╣ТЇ«тЅЇТќЄТЅђУ┐░уЏ┤ТјЦУйгуЪЕТјДтѕХтЪ║ТюгтјЪуљє№╝їтЈ»С╗ЦжЄЄућеSimulinkт╗║уФІуЏ┤ТјЦУйгуЪЕтдѓтЏЙ2-1ТЅђуц║
тЏЙ2-1уЏ┤ТјЦУйгуЪЕу│╗у╗ЪС╗┐уюЪтЏЙ
тюеУ┐ЎСИфС╗┐уюЪу│╗у╗ЪСИГТІЦТюЅСИђСИІтЄаСИфТеАтЮЌ№╝їтѕєтѕФТў»СИЅуЏИТАЦт╝ЈжђєтЈўтЎесђЂСИЅуЏИт╝ѓТГЦућхтіеТю║сђЂтЮљТаЄтЈўТЇб№╝ѕ3/2№╝ЅсђЂт«џтГљуБЂжЊЙУДѓТхІућхУи»сђЂPWMТјДтѕХС┐АтЈиУДѓТхІућхУи»сђѓ
2.2тЮљТаЄтЈўТЇб
СИЅуЏИућхтјІтюежЮЎТГб тЮљТаЄу│╗тЈўТЇбуџёУАеУЙЙт╝ЈСИ║№╝џ
тЮљТаЄу│╗тЈўТЇбуџёУАеУЙЙт╝ЈСИ║№╝џ
 №╝ѕ2-1№╝Ѕ
№╝ѕ2-1№╝Ѕ
СИЅуЏИућхТхЂтюежЮЎТГбтЮљТаЄу│╗тЈўТЇбуџёУАеУЙЙт╝ЈСИ║№╝џ
 №╝ѕ2-2№╝Ѕ
№╝ѕ2-2№╝Ѕ
Та╣ТЇ«УАеУЙЙт╝Ј№╝ѕ2-1№╝ЅсђЂ№╝ѕ2-2№╝ЅС╗ЦтЈіућхТю║уџётЈѓТЋ░тЈ»С╗ЦтЙЌтѕ░СИЅуЏИућхтјІућхТхЂтюежЮЎТГбтЮљТаЄу│╗уџёС╗┐уюЪтЏЙ№╝їтюетЏЙ2-1СИГТѕЉС╗гжЄЄућеТеАтЮЌС╗БТЏ┐С║єУ┐ЎжЃетѕєС╗┐уюЪућхУи»№╝їТеАтЮЌтєЁжЃеућхУи»тЏЙтдѓтЏЙ2-2ТЅђуц║сђѓ
тЏЙ2-2 3/2тЮљТаЄтЈўТЇбС╗┐уюЪтЏЙ
ућхУи»уџёУЙЊтЁЦСИ║СИЅуЏИућхтјІТѕќУђЁућхТхЂ№╝їу╗ЈУ┐ЄућхУи»уџёТЋ░тГдУйгТЇбС╣Ітљј№╝їТюђу╗ѕтюеућхУи»уџёaсђЂbСИцуФ»УЙЊтЄ║тюежЮЎТГбтЮљТаЄу│╗СИІуџёућхТхЂ№╝ѕ
 №╝ЅТѕќУђЁжЮЎТГбтЮљТаЄу│╗СИІуџёућхтјІ№╝ѕ
№╝ЅТѕќУђЁжЮЎТГбтЮљТаЄу│╗СИІуџёућхтјІ№╝ѕ тњї
тњї №╝Ѕсђѓ
№╝Ѕсђѓ
2.3т«џтГљуБЂжЊЙУДѓТхІућхУи»
тюеуЏ┤ТјЦУйгуЪЕТјДтѕХу│╗у╗ЪСИГТЌаУ«║Тў»ТїЅтюєтйбУйеУ┐╣ТјДтѕХУ┐ўТў»жЄЄућетЁГУЙ╣тйбУйеУ┐╣ТјДтѕХ№╝їжЃйжюђУдЂти▓уЪЦт«џтГљуБЂжЊЙсђѓућхТю║жбЮт«џт«џтГљуБЂжЊЙуџёУАеУЙЙт╝ЈСИ║№╝џ
№╝ѕ2-3№╝Ѕ
EРђћРђћТ»ЈуЏИт«џтГљућхті┐уџёТюЅТЋѕтђ╝
fРђћРђћт«џтГљжбЉујЄ
УђїтюеУ«Ау«ЌућхТю║т«ъжЎЁУ┐љУАїТЌХуџёт«џтГљуБЂжЊЙТў»СИђУѕгжЄЄућеС╗ЦСИІУАеУЙЙт╝Ј№╝џ
 №╝ѕ2-4№╝Ѕ
№╝ѕ2-4№╝Ѕ
С╗ІС║јУДѓТхІт«џтГљуБЂжЊЙуџёжЄЇУдЂТђД№╝їтюеС╗┐уюЪтЏЙ2-1СИГжЄЄућеТеАтЮЌSubsystemС╗БТЏ┐С║єтцЇТЮѓуџёС╗┐уюЪућхУи»уџё№╝їтЪ║С║јт«џтГљућхтјІућхТхЂтњїУйгжђЪуџёуБЂжЊЙУДѓТхІТеАтъІ№╝їТеАтЮЌSubsystemСИГуџётЁиСйЊућхУи»тЏЙтдѓтЏЙ2-3ТЅђуц║сђѓ
2-3уБЂжЊЙУДѓТхІС╗┐уюЪућхУи»
2.4 PWMТјДтѕХС┐АтЈиућЪТѕљТеАтЮЌ
тЪ║С║јт«џтГљуБЂжЊЙуџёуЏ┤ТјЦУйгуЪЕТјДтѕХу│╗у╗ЪуџётјЪуљєт░▒Тў»С╗Цт«џтГљуБЂжЊЙСИ║ТјДтѕХт»╣У▒А№╝їТа╣ТЇ«т«џтГљуБЂжЊЙуџёжюђУдЂт»╣ућхУи»уџёућхтјІућхТхЂУ┐ЏУАїУ░ЃТЋ┤сђѓтюеТюгТгАС╗┐уюЪСИГ№╝їт»╣ућхТхЂтЈіућхтјІуџёУ░ЃТЋ┤жЃйжюђУдЂт»╣СИЅуЏИжђєтЈўућхУи»У┐ЏУАїУ░ЃТЋ┤№╝їС╣Ът░▒Тў»жюђУдЂт»╣СИЅуЏИТАЦт╝ЈжђєтЈўућхУи»уџё6СИфт╝ђтЁ│у«Ауџёт╝ђтЁ│жбЉујЄтЈіт╝ђтЁ│ТЌХжЌ┤У┐ЏУАїТюЅуЏ«уџёТђДуџёТјДтѕХсђѓ
тюеУ┐ЎТгАС╗┐уюЪУ┐ЄуеІСИГт»╣С║јPWMТ│буџёС║ДућЪжЄЄућеС║єС║їу╗┤УАеТа╝№╝ѕУАе2-1№╝ЅуџёТќ╣Т│ЋтЙЌтЄ║№╝їтЁХСИГMsСИ║уБЂжЊЙС┐АтЈи№╝їMs=0УАеуц║тЄЈт░ЉуБЂжЊЙ№╝їMs=1УАеуц║тбътіа№╝ЏуБЂжЊЙTsСИ║УйгуЪЕС┐АтЈи№╝їTs=--1УАеуц║тЄЈт░ЉУйгуЪЕ№╝їTs=0УАеуц║С┐ЮТїЂУйгуЪЕСИЇтЈў№╝їTs=1УАеуц║тбътіаУйгуЪЕ№╝ЏFsСИ║уБЂжЊЙТЅђтюеТЅЄтї║С┐АтЈисђѓ
УАе2-1ућхтјІуЪбжЄЈжђЅТІЕУАе
|
Ms |
Ts |
Fs |
|
1 |
2 |
3 |
4 |
5 |
6 |
|
0 |
-1 |
U1 |
U5 |
U4 |
U6 |
U2 |
U3 |
|
0 |
U0 |
U7 |
U0 |
U7 |
U0 |
U7 |
|
1 |
U2 |
U3 |
U1 |
U5 |
U4 |
U6 |
|
1 |
-1 |
U5 |
U4 |
U6 |
U2 |
U3 |
U1 |
|
0 |
U7 |
U0 |
U7 |
U0 |
U7 |
U0 |
|
1 |
U6 |
U2 |
U3 |
U1 |
U5 |
U4 |
тюеТюгТгАС╗┐уюЪСИГжЄЄућеС║єтЄйТЋ░У«Ау«Ќs-FunctionуџёТќ╣Т│ЋТЮЦт»╣ТЮЦуА«т«џMsсђЂTsС╗ЦтЈіFsуџёТЋ░тђ╝№╝їтюеС╗┐уюЪСИГs-function1тњїs-function2тЁ▒тљїуА«т«џС║їу╗┤тЮљТаЄу│╗СИГуџёТЋ░тђ╝сђѓ
s-function1тњїs-function2СИГтЄйТЋ░тЁиСйЊтЈ»УДЂжЎётйЋIсђѓ
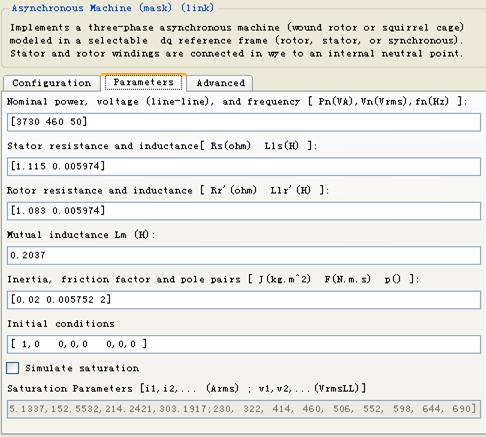
2.5С╗┐уюЪу╗ЊТъю
тдѓтЏЙ2-1СИГт╝ѓТГЦућхТю║уџёС╗┐уюЪтЈѓТЋ░тдѓтЏЙ2-4ТЅђуц║№╝їтЁиСйЊСИ║:жбЮт«џтіЪујЄ Pn= 3730w , жбЮт«џу║┐ућхтјІ Un = 460V, жбЮт«џжбЉујЄfn = 50 Hz , жбЮт«џУйгжђЪn=1460rpm,т«џтГљућхжў╗Rs = 1.115╬Е, т«џтГљТ╝ЈТёЪ L1s = 0.005974H, УйгтГљућхжў╗Rr=1.803╬Е,УйгтГљТ╝ЈТёЪL1 r = 0.005974H, С║њТёЪ Lm 0.2037H, УйгтіеТЃ»жЄЈ J =0.02kg┬иm2, ТЉЕТЊду│╗ТЋ░ F = 0.005752
тЏЙ2-4 т╝ѓТГЦућхТю║С╗┐уюЪтЈѓТЋ░
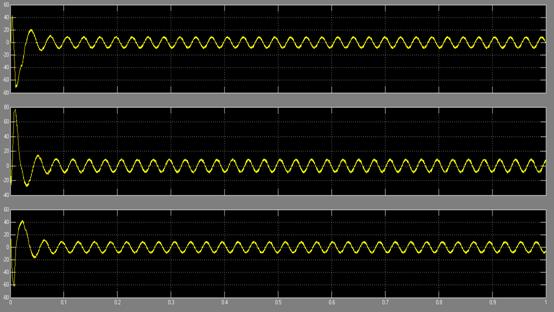
тюеСИЅуЏИжђєтЈўтЎеУЙЊтЄ║уџёСИЅуЏИућхтјІућхТхЂС╝џжџЈуЮђтЈЇждѕтЏъУи»уБЂжЊЙсђЂУйгжђЪС╗ЦтЈіУйгуЪЕУђїтЈЉућЪтЈўтїќ№╝їТЅђС╗ЦС╝џтЄ║уј░СИђС║ЏТ│бтіе№╝їтдѓтЏЙ2-5СИ║СИЅуЏИућхТхЂуџёУЙЊтЄ║Т│бтйбсђѓ
тЏЙ2-5СИЅуЏИућхТхЂТ│бтйб
ућ▒С║јуЏ┤ТјЦУйгуЪЕТјДтѕХу│╗у╗ЪС╗┐уюЪТў»тЪ║С║јт«џтГљуБЂжЊЙуџё№╝їТЅђС╗ЦТЋ┤СИфТјДтѕХуџёуЏ«уџёт░▒Тў»СИ║С║єтЙЌтѕ░СИђСИфтюєтйбуџёт«џтГљуБЂжЊЙ№╝їС╗┐уюЪу╗ЊТъют«џтГљуБЂжЊЙтдѓтЏЙ2-6ТЅђуц║сђѓ
тЏЙ2-6т«џтГљуБЂжЊЙУйеУ┐╣
уЏ┤ТјЦУйгуЪЕТјДтѕХу│╗у╗ЪуџёУЙЊтЄ║УйгуЪЕтюеУ░ЃУіѓУ┐ЄуеІСИГуј░С╝џУЙЙтѕ░т╣Ётђ╝№╝їуёХтљјућ▒С║јжЌГуј»тЈЇждѕСй┐тЙЌт«џтГљуБЂжЊЙу╗┤ТїЂтюєтйб№╝їУЙЊтЄ║УйгуЪЕС╝џжђљТИљжЮаУ┐ЉС║ју╗Ўт«џУйгуЪЕ№╝ѕTm=20№╝Ѕ№╝їСйєућ▒С║јТў»тіеТђЂТеАтъІТЅђС╗ЦС╝џтЄ║уј░Т│бтіе№╝їтЁиСйЊТ│бтйбтдѓтЏЙ2-7ТЅђуц║сђѓ

2-7
тЈѓТЋ░УхёТќЎ:
|
тЪ║С║јтіеТђЂТеАтъІуџёуЏ┤ТјЦУйгуЪЕТјДтѕХТіђТю»С╗┐уюЪтѕєТъљтіеТђЂТеАтъІ,уЏ┤ТјЦУйгуЪЕТјДтѕХТіђТю»С╗┐уюЪтѕєТъљ


|
 ТћХУЌЈуЂхуїФуйЉ
ТћХУЌЈуЂхуїФуйЉ