еҹәдәҺеҠЁжҖҒжЁЎеһӢзҡ„зӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶жҠҖжңҜд»ҝзңҹеҲҶжһҗ
1зӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶зҡ„еҹәжң¬еҺҹзҗҶеҸҠ规еҫӢ
зӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶зі»з»ҹз®Җз§°DTCпјҲDirect Torque Controlпјүзі»з»ҹпјҢжҳҜ继зҹўйҮҸжҺ§еҲ¶зі»з»ҹд№ӢеҗҺеҸ‘еұ•иө·жқҘзҡ„еҸҰеӨ–дёҖз§Қй«ҳеҠЁжҖҒжҖ§иғҪзҡ„дәӨжөҒз”өеҠЁжңәеҸҳеҺӢеҸҳйў‘и°ғйҖҹзі»з»ҹгҖӮеңЁе®ғзҡ„иҪ¬йҖҹзҺҜйҮҢйқўеҲ©з”ЁиҪ¬зҹ©еҸҚйҰҲзӣҙжҺҘжҺ§еҲ¶з”өжңәзҡ„з”өзЈҒиҪ¬зҹ©пјҢеӣ жӯӨиҖҢеҫ—еҗҚдёәзӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶гҖӮ
1.1зӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶зі»з»ҹеҺҹзҗҶдёҺзү№зӮ№
еҰӮеӣҫ1-1дёәзӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶зҡ„еҺҹзҗҶжЎҶеӣҫпјҢе’ҢVCзі»з»ҹдёҖж ·пјҢе®ғд№ҹжҳҜеҲҶеҲ«жҺ§еҲ¶ејӮжӯҘз”өеҠЁжңәзҡ„иҪ¬йҖҹе’ҢзЈҒй“ҫпјҢиҪ¬йҖҹи°ғиҠӮеҷЁASRзҡ„иҫ“еҮәдҪңдёәз”өзЈҒиҪ¬зҹ©зҡ„з»ҷе®ҡдҝЎеҸ· пјҢеңЁеҗҺйқўи®ҫзҪ®иҪ¬зҹ©жҺ§еҲ¶еҶ…зҺҜпјҢе®ғеҸҜд»ҘжҠ‘еҲ¶зЈҒй“ҫеҸҳеҢ–еҜ№дәҺиҪ¬зҹ©зҡ„еҪұе“ҚпјҢд»ҺиҖҢдҪҝеҫ—иҪ¬йҖҹе’ҢзЈҒй“ҫзі»з»ҹе®һзҺ°и§ЈиҖҰгҖӮеӣ жӯӨпјҢд»Һж•ҙдҪ“жҺ§еҲ¶з»“жһ„дёҠжқҘзңӢпјҢзӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶пјҲDTCпјүзі»з»ҹе’ҢзҹўйҮҸжҺ§еҲ¶зі»з»ҹпјҲVCпјүзі»з»ҹжҳҜдёҖиҮҙзҡ„йғҪиҺ·еҫ—дәҶиҫғй«ҳиҙЁйҮҸзҡ„еҠЁжҖҒжҖ§иғҪд»ҘеҸҠйқҷжҖҒжҖ§иғҪгҖӮ
пјҢеңЁеҗҺйқўи®ҫзҪ®иҪ¬зҹ©жҺ§еҲ¶еҶ…зҺҜпјҢе®ғеҸҜд»ҘжҠ‘еҲ¶зЈҒй“ҫеҸҳеҢ–еҜ№дәҺиҪ¬зҹ©зҡ„еҪұе“ҚпјҢд»ҺиҖҢдҪҝеҫ—иҪ¬йҖҹе’ҢзЈҒй“ҫзі»з»ҹе®һзҺ°и§ЈиҖҰгҖӮеӣ жӯӨпјҢд»Һж•ҙдҪ“жҺ§еҲ¶з»“жһ„дёҠжқҘзңӢпјҢзӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶пјҲDTCпјүзі»з»ҹе’ҢзҹўйҮҸжҺ§еҲ¶зі»з»ҹпјҲVCпјүзі»з»ҹжҳҜдёҖиҮҙзҡ„йғҪиҺ·еҫ—дәҶиҫғй«ҳиҙЁйҮҸзҡ„еҠЁжҖҒжҖ§иғҪд»ҘеҸҠйқҷжҖҒжҖ§иғҪгҖӮ
еӣҫ1-1зӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶зі»з»ҹеӣҫ
д»ҺеӣҫдёӯдёӯеҸҜд»ҘзңӢеҮәпјҢзӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶зі»з»ҹпјҢе°ұжҳҜйҖҡиҝҮдҪҝе®ҡиҪ¬еӯҗзЈҒй“ҫ зҡ„е№…еҖјдҝқжҢҒжҒ’е®ҡпјҢ然еҗҺйҖүжӢ©еҗҲзҗҶзҡ„йӣ¶зҹўйҮҸзҡ„дҪңз”Ёж¬ЎеәҸе’ҢдҪңз”Ёж—¶е®ҪпјҢд»Ҙи°ғиҠӮе®ҡеӯҗзЈҒй“ҫзҹўйҮҸзҡ„иҝҗеҠЁйҖҹеәҰпјҢд»ҺиҖҢж”№еҸҳзЈҒйҖҡи§’зҡ„еӨ§е°ҸпјҢд»Ҙе®һзҺ°еҜ№з”өжңәиҪ¬зҹ©зҡ„жҺ§еҲ¶гҖӮеңЁзӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶жҠҖжңҜдёӯпјҢе…¶еҹәжң¬жҺ§еҲ¶ж–№жі•е°ұжҳҜйҖҡиҝҮз”өеҺӢз©әй—ҙзҹўйҮҸжқҘжҺ§еҲ¶е®ҡеӯҗзЈҒй“ҫзҡ„ж—ӢиҪ¬йҖҹеәҰпјҢжҺ§еҲ¶е®ҡеӯҗзЈҒй“ҫиө°иө°еҒңеҒңпјҢд»Ҙж”№еҸҳе®ҡеӯҗзЈҒй“ҫзҡ„е№іеқҮж—ӢиҪ¬йҖҹеәҰзҡ„еӨ§е°ҸпјҢд»ҺиҖҢж”№еҸҳзЈҒйҖҡи§’зҡ„еӨ§е°ҸпјҢд»ҘиҫҫеҲ°жҺ§еҲ¶з”өеҠЁжңәиҪ¬зҹ©зҡ„зӣ®зҡ„гҖӮ
зҡ„е№…еҖјдҝқжҢҒжҒ’е®ҡпјҢ然еҗҺйҖүжӢ©еҗҲзҗҶзҡ„йӣ¶зҹўйҮҸзҡ„дҪңз”Ёж¬ЎеәҸе’ҢдҪңз”Ёж—¶е®ҪпјҢд»Ҙи°ғиҠӮе®ҡеӯҗзЈҒй“ҫзҹўйҮҸзҡ„иҝҗеҠЁйҖҹеәҰпјҢд»ҺиҖҢж”№еҸҳзЈҒйҖҡи§’зҡ„еӨ§е°ҸпјҢд»Ҙе®һзҺ°еҜ№з”өжңәиҪ¬зҹ©зҡ„жҺ§еҲ¶гҖӮеңЁзӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶жҠҖжңҜдёӯпјҢе…¶еҹәжң¬жҺ§еҲ¶ж–№жі•е°ұжҳҜйҖҡиҝҮз”өеҺӢз©әй—ҙзҹўйҮҸжқҘжҺ§еҲ¶е®ҡеӯҗзЈҒй“ҫзҡ„ж—ӢиҪ¬йҖҹеәҰпјҢжҺ§еҲ¶е®ҡеӯҗзЈҒй“ҫиө°иө°еҒңеҒңпјҢд»Ҙж”№еҸҳе®ҡеӯҗзЈҒй“ҫзҡ„е№іеқҮж—ӢиҪ¬йҖҹеәҰзҡ„еӨ§е°ҸпјҢд»ҺиҖҢж”№еҸҳзЈҒйҖҡи§’зҡ„еӨ§е°ҸпјҢд»ҘиҫҫеҲ°жҺ§еҲ¶з”өеҠЁжңәиҪ¬зҹ©зҡ„зӣ®зҡ„гҖӮ
д»Һд»ҘдёҠд»Ӣз»ҚжҲ‘们еҸҜд»ҘдәҶи§ЈеҲ°DTCзі»з»ҹеңЁе…·дҪ“жҺ§еҲ¶ж–№жі•дёҠзҡ„дёҖдәӣзү№зӮ№пјҡ
в‘ҙиҪ¬зҹ©е’ҢзЈҒй“ҫзҡ„жҺ§еҲ¶йҮҮз”ЁеҸҢдҪҚејҸжҺ§еҲ¶еҷЁпјҢ并еңЁPWMзҡ„йҖҶеҸҳеҷЁдёӯзӣҙжҺҘз”ЁиҝҷдёӨдёӘжҺ§еҲ¶дҝЎеҸ·дә§з”ҹз”өеҺӢзҡ„SVPWMжіўеҪўпјҢд»ҺиҖҢйҒҝејҖдәҶе°Ҷе®ҡеӯҗз”өжөҒеҲҶи§ЈжҲҗиҪ¬зҹ©е’ҢзЈҒй“ҫеҲҶйҮҸпјҢзңҒеҺ»дәҶж—ӢиҪ¬еҸҳжҚўе’Ңз”өжөҒжҺ§еҲ¶пјҢз®ҖеҢ–дәҶжҺ§еҲ¶еҷЁзҡ„е§җз»“жһ„гҖӮ
в‘өйҖүжӢ©е®ҡеӯҗзЈҒй“ҫдҪңдёәиў«жҺ§еҲ¶йҮҸпјҢиҖҢдёҚеғҸVCзі»з»ҹдёӯйӮЈж ·йҖүжӢ©ж—ӢиҪ¬зЈҒй“ҫпјҢиҝҷж ·дёҖжқҘпјҢи®Ўз®—зЈҒй“ҫзҡ„жЁЎеһӢеҸҜд»ҘдёҚеҸ—иҪ¬еӯҗеҸӮж•°еҸҳеҢ–зҡ„еҪұе“ҚпјҢжҸҗй«ҳдәҶжҺ§еҲ¶зі»з»ҹзҡ„йІҒжЈ’жҖ§гҖӮеҰӮжһңд»Һж•°еӯҰжЁЎеһӢжҺ§еҲ¶зҡ„规еҫӢпјҢжҳҫ然иҰҒжҜ”иҪ¬еӯҗзЈҒй“ҫе®ҡеҗ‘ж—¶еӨҚжқӮзҡ„еӨҡгҖӮ
⑶з”ұдәҺйҮҮз”ЁдәҶзӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶пјҢеңЁеҮҸйҖҹжҲ–иҙҹиҪҪеҸҳеҢ–зҡ„еҠЁжҖҒиҝҮзЁӢдёӯпјҢеҸҜд»ҘиҺ·еҫ—еҝ«йҖҹзҡ„иҪ¬зҹ©е“Қеә”пјҢдҪҶеҝ…йЎ»жіЁж„ҸйҷҗеҲ¶иҝҮеӨ§зҡ„еҶІеҮ»з”өжөҒпјҢд»Ҙе…ҚжҚҹеқҸеҠҹзҺҮејҖе…іеҷЁд»¶пјҢеӣ жӯӨе®һйҷ…зҡ„иҪ¬зҹ©е“Қеә”д№ҹжҳҜжңүйҷҗзҡ„гҖӮ
1.2зӣҙжҺҘиҪ¬зҹ©зі»з»ҹзҡ„жҺ§еҲ¶и§„еҫӢе’ҢеҸҚйҰҲзі»з»ҹ
еңЁDTCзі»з»ҹдёӯйҮҮз”Ёзҡ„жҳҜдёӨзӣёйқҷжӯўеқҗж ҮпјҲОұОІеқҗж ҮпјүпјҢдёәдәҶз®ҖеҢ–ж•°еӯҰжЁЎеһӢпјҢз”ұдёүзӣёеқҗж ҮеҸҳжҚўжҲҗдёӨзӣёжҳҜйқһеёёйҮҚиҰҒзҡ„пјҢжүҖд»ҘеҸҜд»ҘйҒҝејҖж—ӢиҪ¬еҸҳжҚўгҖӮз”ұејҸпјҲ1-1пјүе’ҢејҸпјҲ1-2пјүеҸҜеҫ—
 пјҲ1-1пјү
пјҲ1-1пјү
 пјҲ1-2пјү
пјҲ1-2пјү
移项并з§ҜеҲҶеҗҺеҫ—
 пјҲ1-3пјү
пјҲ1-3пјү
 пјҲ1-4пјү
пјҲ1-4пјү
ејҸпјҲ1-3пјүе’ҢејҸпјҲ1-4пјүе°ұжҳҜеӣҫ1-1дёӯжүҖйҮҮз”Ёзҡ„е®ҡеӯҗзЈҒй“ҫжЁЎеһӢпјҢе…¶з»“жһ„жЎҶеӣҫеҰӮеӣҫ2-2жүҖзӨәгҖӮе®ғйҖӮеҗҲдәҺдёӯдҪҺйҖҹж—¶еҲҮжҚўеҲ°з”өжөҒжЁЎеһӢпјҢиҝҷжҳҜдёҠиҝ°иғҪжҸҗй«ҳйІҒжЈ’жҖ§зҡ„дјҳзӮ№е°ұдёҚеҫ—дёҚдёўејғгҖӮ


еӣҫ2-2 е®ҡеӯҗзЈҒй“ҫжЁЎеһӢз»“жһ„жЎҶеӣҫ
еңЁдёӨзӣёйқҷжӯўеқҗж Үзі»дёҠзҡ„з”өзЈҒиҪ¬зҹ©иЎЁиҫҫејҸдёә
 пјҲ1-5пјү
пјҲ1-5пјү
ж•ҙзҗҶеҸҜеҫ—
 пјҲ1-6пјүиҝҷе°ұжҳҜDTCзі»з»ҹжүҖз”Ёзҡ„зі»з»ҹжЁЎеһӢпјҢз»“жһ„еӣҫеҰӮеӣҫ1-3жүҖзӨәгҖӮ
пјҲ1-6пјүиҝҷе°ұжҳҜDTCзі»з»ҹжүҖз”Ёзҡ„зі»з»ҹжЁЎеһӢпјҢз»“жһ„еӣҫеҰӮеӣҫ1-3жүҖзӨәгҖӮ
еӣҫ1-3 иҪ¬зҹ©жЁЎеһӢз»“жһ„жЎҶеӣҫ
2зі»з»ҹд»ҝзңҹеҲҶжһҗ
2.1д»ҝзңҹжЁЎеһӢзҡ„е»әз«Ӣ
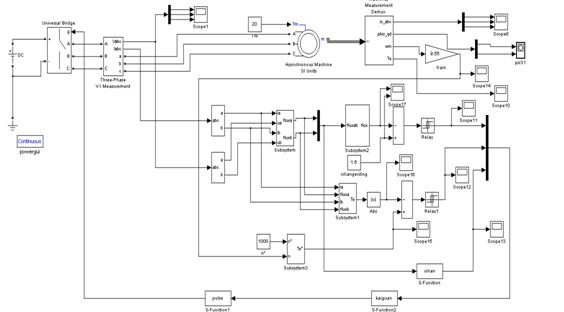
ж №жҚ®еүҚж–ҮжүҖиҝ°зӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶еҹәжң¬еҺҹзҗҶпјҢеҸҜд»ҘйҮҮз”ЁSimulinkе»әз«ӢзӣҙжҺҘиҪ¬зҹ©еҰӮеӣҫ2-1жүҖзӨә
еӣҫ2-1зӣҙжҺҘиҪ¬зҹ©зі»з»ҹд»ҝзңҹеӣҫ
еңЁиҝҷдёӘд»ҝзңҹзі»з»ҹдёӯжӢҘжңүдёҖдёӢеҮ дёӘжЁЎеқ—пјҢеҲҶеҲ«жҳҜдёүзӣёжЎҘејҸйҖҶеҸҳеҷЁгҖҒдёүзӣёејӮжӯҘз”өеҠЁжңәгҖҒеқҗж ҮеҸҳжҚўпјҲ3/2пјүгҖҒе®ҡеӯҗзЈҒй“ҫи§ӮжөӢз”өи·ҜгҖҒPWMжҺ§еҲ¶дҝЎеҸ·и§ӮжөӢз”өи·ҜгҖӮ
2.2еқҗж ҮеҸҳжҚў
дёүзӣёз”өеҺӢеңЁйқҷжӯў еқҗж Үзі»еҸҳжҚўзҡ„иЎЁиҫҫејҸдёәпјҡ
еқҗж Үзі»еҸҳжҚўзҡ„иЎЁиҫҫејҸдёәпјҡ
 пјҲ2-1пјү
пјҲ2-1пјү
дёүзӣёз”өжөҒеңЁйқҷжӯўеқҗж Үзі»еҸҳжҚўзҡ„иЎЁиҫҫејҸдёәпјҡ
 пјҲ2-2пјү
пјҲ2-2пјү
ж №жҚ®иЎЁиҫҫејҸпјҲ2-1пјүгҖҒпјҲ2-2пјүд»ҘеҸҠз”өжңәзҡ„еҸӮж•°еҸҜд»Ҙеҫ—еҲ°дёүзӣёз”өеҺӢз”өжөҒеңЁйқҷжӯўеқҗж Үзі»зҡ„д»ҝзңҹеӣҫпјҢеңЁеӣҫ2-1дёӯжҲ‘们йҮҮз”ЁжЁЎеқ—д»ЈжӣҝдәҶиҝҷйғЁеҲҶд»ҝзңҹз”өи·ҜпјҢжЁЎеқ—еҶ…йғЁз”өи·ҜеӣҫеҰӮеӣҫ2-2жүҖзӨәгҖӮ
еӣҫ2-2 3/2еқҗж ҮеҸҳжҚўд»ҝзңҹеӣҫ
з”өи·Ҝзҡ„иҫ“е…Ҙдёәдёүзӣёз”өеҺӢжҲ–иҖ…з”өжөҒпјҢз»ҸиҝҮз”өи·Ҝзҡ„ж•°еӯҰиҪ¬жҚўд№ӢеҗҺпјҢжңҖз»ҲеңЁз”өи·Ҝзҡ„aгҖҒbдёӨз«Ҝиҫ“еҮәеңЁйқҷжӯўеқҗж Үзі»дёӢзҡ„з”өжөҒпјҲ
 пјүжҲ–иҖ…йқҷжӯўеқҗж Үзі»дёӢзҡ„з”өеҺӢпјҲ
пјүжҲ–иҖ…йқҷжӯўеқҗж Үзі»дёӢзҡ„з”өеҺӢпјҲ е’Ң
е’Ң пјүгҖӮ
пјүгҖӮ
2.3е®ҡеӯҗзЈҒй“ҫи§ӮжөӢз”өи·Ҝ
еңЁзӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶зі»з»ҹдёӯж— и®әжҳҜжҢүеңҶеҪўиҪЁиҝ№жҺ§еҲ¶иҝҳжҳҜйҮҮз”Ёе…ӯиҫ№еҪўиҪЁиҝ№жҺ§еҲ¶пјҢйғҪйңҖиҰҒе·ІзҹҘе®ҡеӯҗзЈҒй“ҫгҖӮз”өжңәйўқе®ҡе®ҡеӯҗзЈҒй“ҫзҡ„иЎЁиҫҫејҸдёәпјҡ
пјҲ2-3пјү
EвҖ”вҖ”жҜҸзӣёе®ҡеӯҗз”өеҠҝзҡ„жңүж•ҲеҖј
fвҖ”вҖ”е®ҡеӯҗйў‘зҺҮ
иҖҢеңЁи®Ўз®—з”өжңәе®һйҷ…иҝҗиЎҢж—¶зҡ„е®ҡеӯҗзЈҒй“ҫжҳҜдёҖиҲ¬йҮҮз”Ёд»ҘдёӢиЎЁиҫҫејҸпјҡ
 пјҲ2-4пјү
пјҲ2-4пјү
д»ӢдәҺи§ӮжөӢе®ҡеӯҗзЈҒй“ҫзҡ„йҮҚиҰҒжҖ§пјҢеңЁд»ҝзңҹеӣҫ2-1дёӯйҮҮз”ЁжЁЎеқ—Subsystemд»ЈжӣҝдәҶеӨҚжқӮзҡ„д»ҝзңҹз”өи·Ҝзҡ„пјҢеҹәдәҺе®ҡеӯҗз”өеҺӢз”өжөҒе’ҢиҪ¬йҖҹзҡ„зЈҒй“ҫи§ӮжөӢжЁЎеһӢпјҢжЁЎеқ—Subsystemдёӯзҡ„е…·дҪ“з”өи·ҜеӣҫеҰӮеӣҫ2-3жүҖзӨәгҖӮ
2-3зЈҒй“ҫи§ӮжөӢд»ҝзңҹз”өи·Ҝ
2.4 PWMжҺ§еҲ¶дҝЎеҸ·з”ҹжҲҗжЁЎеқ—
еҹәдәҺе®ҡеӯҗзЈҒй“ҫзҡ„зӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶зі»з»ҹзҡ„еҺҹзҗҶе°ұжҳҜд»Ҙе®ҡеӯҗзЈҒй“ҫдёәжҺ§еҲ¶еҜ№иұЎпјҢж №жҚ®е®ҡеӯҗзЈҒй“ҫзҡ„йңҖиҰҒеҜ№з”өи·Ҝзҡ„з”өеҺӢз”өжөҒиҝӣиЎҢи°ғж•ҙгҖӮеңЁжң¬ж¬Ўд»ҝзңҹдёӯпјҢеҜ№з”өжөҒеҸҠз”өеҺӢзҡ„и°ғж•ҙйғҪйңҖиҰҒеҜ№дёүзӣёйҖҶеҸҳз”өи·ҜиҝӣиЎҢи°ғж•ҙпјҢд№ҹе°ұжҳҜйңҖиҰҒеҜ№дёүзӣёжЎҘејҸйҖҶеҸҳз”өи·Ҝзҡ„6дёӘејҖе…із®Ўзҡ„ејҖе…ійў‘зҺҮеҸҠејҖе…іж—¶й—ҙиҝӣиЎҢжңүзӣ®зҡ„жҖ§зҡ„жҺ§еҲ¶гҖӮ
еңЁиҝҷж¬Ўд»ҝзңҹиҝҮзЁӢдёӯеҜ№дәҺPWMжіўзҡ„дә§з”ҹйҮҮз”ЁдәҶдәҢз»ҙиЎЁж јпјҲиЎЁ2-1пјүзҡ„ж–№жі•еҫ—еҮәпјҢе…¶дёӯMsдёәзЈҒй“ҫдҝЎеҸ·пјҢMs=0иЎЁзӨәеҮҸе°‘зЈҒй“ҫпјҢMs=1иЎЁзӨәеўһеҠ пјӣзЈҒй“ҫTsдёәиҪ¬зҹ©дҝЎеҸ·пјҢTs=--1иЎЁзӨәеҮҸе°‘иҪ¬зҹ©пјҢTs=0иЎЁзӨәдҝқжҢҒиҪ¬зҹ©дёҚеҸҳпјҢTs=1иЎЁзӨәеўһеҠ иҪ¬зҹ©пјӣFsдёәзЈҒй“ҫжүҖеңЁжүҮеҢәдҝЎеҸ·гҖӮ
иЎЁ2-1з”өеҺӢзҹўйҮҸйҖүжӢ©иЎЁ
|
Ms |
Ts |
Fs |
|
1 |
2 |
3 |
4 |
5 |
6 |
|
0 |
-1 |
U1 |
U5 |
U4 |
U6 |
U2 |
U3 |
|
0 |
U0 |
U7 |
U0 |
U7 |
U0 |
U7 |
|
1 |
U2 |
U3 |
U1 |
U5 |
U4 |
U6 |
|
1 |
-1 |
U5 |
U4 |
U6 |
U2 |
U3 |
U1 |
|
0 |
U7 |
U0 |
U7 |
U0 |
U7 |
U0 |
|
1 |
U6 |
U2 |
U3 |
U1 |
U5 |
U4 |
еңЁжң¬ж¬Ўд»ҝзңҹдёӯйҮҮз”ЁдәҶеҮҪж•°и®Ўз®—s-Functionзҡ„ж–№жі•жқҘеҜ№жқҘзЎ®е®ҡMsгҖҒTsд»ҘеҸҠFsзҡ„ж•°еҖјпјҢеңЁд»ҝзңҹдёӯs-function1е’Ңs-function2е…ұеҗҢзЎ®е®ҡдәҢз»ҙеқҗж Үзі»дёӯзҡ„ж•°еҖјгҖӮ
s-function1е’Ңs-function2дёӯеҮҪж•°е…·дҪ“еҸҜи§Ғйҷ„еҪ•IгҖӮ
2.5д»ҝзңҹз»“жһң
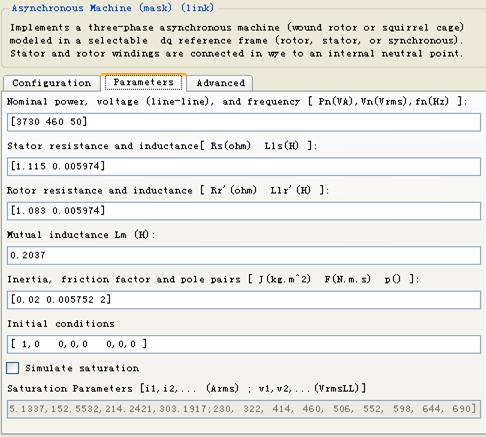
еҰӮеӣҫ2-1дёӯејӮжӯҘз”өжңәзҡ„д»ҝзңҹеҸӮж•°еҰӮеӣҫ2-4жүҖзӨәпјҢе…·дҪ“дёә:йўқе®ҡеҠҹзҺҮ Pn= 3730w , йўқе®ҡзәҝз”өеҺӢ Un = 460V, йўқе®ҡйў‘зҺҮfn = 50 Hz , йўқе®ҡиҪ¬йҖҹn=1460rpm,е®ҡеӯҗз”өйҳ»Rs = 1.115О©, е®ҡеӯҗжјҸж„ҹ L1s = 0.005974H, иҪ¬еӯҗз”өйҳ»Rr=1.803О©,иҪ¬еӯҗжјҸж„ҹL1 r = 0.005974H, дә’ж„ҹ Lm 0.2037H, иҪ¬еҠЁжғҜйҮҸ J =0.02kgВ·m2, ж‘©ж“Ұзі»ж•° F = 0.005752
еӣҫ2-4 ејӮжӯҘз”өжңәд»ҝзңҹеҸӮж•°
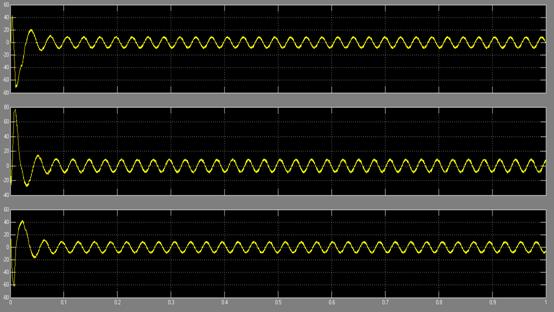
еңЁдёүзӣёйҖҶеҸҳеҷЁиҫ“еҮәзҡ„дёүзӣёз”өеҺӢз”өжөҒдјҡйҡҸзқҖеҸҚйҰҲеӣһи·ҜзЈҒй“ҫгҖҒиҪ¬йҖҹд»ҘеҸҠиҪ¬зҹ©иҖҢеҸ‘з”ҹеҸҳеҢ–пјҢжүҖд»ҘдјҡеҮәзҺ°дёҖдәӣжіўеҠЁпјҢеҰӮеӣҫ2-5дёәдёүзӣёз”өжөҒзҡ„иҫ“еҮәжіўеҪўгҖӮ
еӣҫ2-5дёүзӣёз”өжөҒжіўеҪў
з”ұдәҺзӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶зі»з»ҹд»ҝзңҹжҳҜеҹәдәҺе®ҡеӯҗзЈҒй“ҫзҡ„пјҢжүҖд»Ҙж•ҙдёӘжҺ§еҲ¶зҡ„зӣ®зҡ„е°ұжҳҜдёәдәҶеҫ—еҲ°дёҖдёӘеңҶеҪўзҡ„е®ҡеӯҗзЈҒй“ҫпјҢд»ҝзңҹз»“жһңе®ҡеӯҗзЈҒй“ҫеҰӮеӣҫ2-6жүҖзӨәгҖӮ
еӣҫ2-6е®ҡеӯҗзЈҒй“ҫиҪЁиҝ№
зӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶зі»з»ҹзҡ„иҫ“еҮәиҪ¬зҹ©еңЁи°ғиҠӮиҝҮзЁӢдёӯзҺ°дјҡиҫҫеҲ°е№…еҖјпјҢ然еҗҺз”ұдәҺй—ӯзҺҜеҸҚйҰҲдҪҝеҫ—е®ҡеӯҗзЈҒй“ҫз»ҙжҢҒеңҶеҪўпјҢиҫ“еҮәиҪ¬зҹ©дјҡйҖҗжёҗйқ иҝ‘дәҺз»ҷе®ҡиҪ¬зҹ©пјҲTm=20пјүпјҢдҪҶз”ұдәҺжҳҜеҠЁжҖҒжЁЎеһӢжүҖд»ҘдјҡеҮәзҺ°жіўеҠЁпјҢе…·дҪ“жіўеҪўеҰӮеӣҫ2-7жүҖзӨәгҖӮ

2-7
еҸӮж•°иө„ж–ҷ:
|
еҹәдәҺеҠЁжҖҒжЁЎеһӢзҡ„зӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶жҠҖжңҜд»ҝзңҹеҲҶжһҗеҠЁжҖҒжЁЎеһӢ,зӣҙжҺҘиҪ¬зҹ©жҺ§еҲ¶жҠҖжңҜд»ҝзңҹеҲҶжһҗ


|
 收и—Ҹи‘©жҳҹ
收и—Ҹи‘©жҳҹ





 400-878-1895
400-878-1895