|
ж‘ҳ иҰҒ ж–Үз« д»Ӣз»ҚдәҶеҹәдәҺзҺ°еңәжҖ»зәҝLEDз«Ӣйқўз…§жҳҺзҡ„жҷәиғҪжҺ§еҲ¶зі»з»ҹгҖӮиҜҘзі»з»ҹйҖҡиҝҮйҮҮз”ЁRSпјҚ485зҺ°еңәжҖ»зәҝжҠҖжңҜеҜ№з«Ӣйқўз…§жҳҺе®һзҺ°зј–иҫ‘е’ҢжҺ§еҲ¶гҖӮж–Үз« йҳҗиҝ°дәҶзі»з»ҹеҗ„з»„жҲҗйғЁеҲҶзҡ„еҠҹиғҪе’Ңе®һзҺ°ж–№жЎҲпјҢйҮҚзӮ№д»Ӣз»ҚдәҶиҮӘе®ҡд№үзҡ„йҖҡдҝЎеҚҸи®®д»ҘеҸҠдё»з«ҷжҺ§еҲ¶иҪҜ件зҡ„жһ„件и®ҫи®ЎгҖӮ
е…ій”®иҜҚ RS-485 дёІеҸЈ зҒҜе…ү LED
гҖҖгҖҖ1 еүҚиЁҖ
гҖҖгҖҖзӣ®еүҚпјҢеңЁжҲ‘еӣҪеҗ„еӨ§еҹҺеёӮең°ж ҮжҖ§е»әзӯ‘зү©зҡ„еӨңжҷҜз«Ӣйқўз…§жҳҺдёӯпјҢе·ІејҖе§ӢеӨ§йҮҸиҝҗз”ЁиҠӮиғҪгҖҒе“Қеә”еҝ«гҖҒиүІеҪ©иүідёҪзҡ„LEDе…үжәҗпјҢйҷӨиҠӮиғҪеӨ–пјҢд»ҺеӨңжҷҜж•ҲжһңжқҘзңӢпјҢеҸҜжҺ§еҲ¶жҖ§ејәгҖӮеҸҳеҢ–дё°еҜҢжҳҜLEDе…үжәҗдёҺдј з»ҹе…үжәҗзҡ„жңҖеҢәеҲ«гҖӮеӣ жӯӨпјҢејҖеҸ‘е…ҲиҝӣгҖҒеҸҜйқ зҡ„жҺ§еҲ¶зі»з»ҹжҲҗдёәеҸ‘жҢҘLEDе…үжәҗдјҳеҠҝзҡ„е…ій”®гҖӮ
гҖҖгҖҖд»ҺеӣҪеҶ…зҡ„еә”з”ЁзҠ¶еҶөжқҘзңӢпјҢзӣ®еүҚеёӮеңәеӨҡйҮҮз”ЁдёӨз§ҚжҺ§еҲ¶ж–№ејҸпјҡеҶ…жҺ§дёҺеӨ–жҺ§пјҢеә”з”Ёиҝҳдё»иҰҒйӣҶдёӯеңЁз®ҖеҚ•зҡ„иүІеҪ©еҸҳжҚўдёҠгҖӮеӣ жӯӨпјҢйҮҮз”ЁдёӨз§ҚжҺ§еҲ¶ж–№ејҸзҡ„LEDйЎ№зӣ®дёҺйҮҮз”Ёдј з»ҹе…үжәҗзҡ„йЎ№зӣ®зӣёжҜ”пјҢйғҪеӯҳеңЁеҗҢдёҖдёӘй—®йўҳпјҡз…§жҳҺж•Ҳжһңзҡ„еӣәе®ҡжҖ§гҖӮиҝҷз§ҚзҺ°иұЎдёҺLEDдә§е“Ғзҡ„й•ҝеҜҝе‘ҪгҖҒеӨҡиүІеҪ©гҖҒй«ҳе“Қеә”еәҰзӯүзү№зӮ№зӣёиҝқиғҢпјҢдёҚеҲ©дәҺеҸ‘жҢҘLEDзҡ„дјҳеҠҝпјҢдёҘйҮҚеҪұе“ҚдәҶLEDзҡ„жҺЁе№ҝгҖӮеӣ жӯӨпјҢжҲ‘们д»ҘдёәпјҢи®ҫи®ЎејҖеҸ‘ж–°еһӢзҡ„жҺ§еҲ¶ж–№ејҸпјҢдҪҝLEDеӨңжҷҜз”»йқўеҸҜйҡҸж—¶жӣҙж–°пјҢе°ҶжһҒеӨ§ең°жҺЁеҠЁLEDдә§дёҡзҡ„еҸ‘еұ•гҖӮ
гҖҖгҖҖ笔иҖ…йҖҡиҝҮеҜ№еӣҪ家新жқҗж–ҷиЎҢдёҡз”ҹдә§еҠӣдҝғиҝӣдёӯеҝғдәҺ2005е®һж–Ҫзҡ„иҜҫйўҳгҖҠеҚҠеҜјдҪ“з…§жҳҺеә”з”ЁзӨәиҢғе·ҘзЁӢгҖӢдёӯж–°еһӢвҖңLEDзҒҜе…үжҺ§еҲ¶зі»з»ҹвҖқзҡ„з®ҖиҰҒд»Ӣз»ҚпјҢеҜ№иҜҘзі»з»ҹеңЁи®ҫи®ЎиҝҮзЁӢдёӯжүҖж¶үеҸҠеҲ°зҡ„иӢҘе№Ій—®йўҳиҝӣиЎҢи®Ёи®әпјҢ并д»Һзі»з»ҹжһ„жһ¶и®ҫи®ЎгҖҒйҖҡдҝЎеҚҸи®®и®ҫи®ЎгҖҒиҪҜ件жһ„жһ¶и®ҫи®ЎдёүдёӘж–№йқўйҮҚзӮ№и®Ёи®әжӯӨжЁЎејҸзҡ„зү№зӮ№еҸҠи®ҫи®ЎиҰҒзӮ№гҖӮ
гҖҖгҖҖ2 зі»з»ҹжһ„жһ¶и®ҫи®Ў
гҖҖгҖҖLEDжҷәиғҪзҒҜе…үжҺ§еҲ¶зі»з»ҹжҳҜеҹәдәҺRSпјҚ485йҖҡдҝЎжҠҖжңҜзҡ„зҺ°еңәжҖ»зәҝпјҢйҖҡиҝҮиҮӘе®ҡд№үйҖҡдҝЎеҚҸи®®еңЁжҖ»зәҝдёҠеӨ–жҢӮеҗ„зұ»еһӢжҺ§еҲ¶еҷЁпјҢ并з”ұдё»жҺ§з»ҹдёҖз®ЎзҗҶзҡ„дё»д»ҺејҸжҖ»зәҝеһӢз…§жҳҺжҺ§еҲ¶зі»з»ҹгҖӮе®ғеҢ…жӢ¬дё»жҺ§еұӮгҖҒйҖҡдҝЎеұӮгҖҒеҸҠLEDзҒҜе…·еұӮпјҢзі»з»ҹеұӮж¬Ўз»“жһ„еҰӮдёӢиЎЁжүҖзӨәгҖӮ
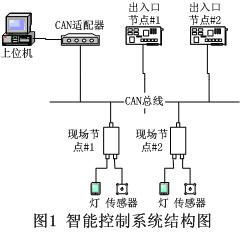
гҖҖгҖҖе…¶дёӯпјҢдё»жҺ§еұӮиҙҹиҙЈж•Ҳжһңзј–иҫ‘гҖҒеҲҶжһҗгҖҒеӯҳеӮЁгҖҒж•°жҚ®жү“еҢ…еҲҶй…ҚпјҢд»Һз…§жҳҺж•ҲжһңеҸӮж•°зҡ„и®ҫе®ҡе’Ңдҝ®ж”№пјҢеҲ°ж•°жҚ®зҡ„жҹҘиҜўпјҢе®һзҺ°еҜ№LEDзҒҜе…·зҡ„з®ЎзҗҶпјӣйҖҡдҝЎеұӮйҖҡиҝҮиҮӘеҲ¶е®ҡзҡ„йҖҡдҝЎеҚҸи®®дёҺLEDзҒҜе…·еұӮеҸҠдё»жҺ§еұӮиҝӣиЎҢйҖҡдҝЎпјҢе®ҢжҲҗж•°жҚ®жӢҶеҢ…гҖҒж ЎйӘҢгҖҒж•°жҚ®еҶҚеҲҶй…ҚзӯүеӨҡжӯҘйӘӨзҡ„ж•°жҚ®еӨ„зҗҶпјӣLEDзҒҜе…·еұӮз”ұNдёӘзҒҜе…·з»„жҲҗпјҢж ёеҝғдёәInter C51еҚ•зүҮжңәз»„жҲҗзҡ„ж•°жҚ®еӨ„зҗҶзі»з»ҹгҖӮзі»з»ҹжӢ“жү‘з»“жһ„еҰӮеӣҫ1жүҖзӨәгҖӮ
гҖҖгҖҖйҖҡиҝҮе·ҘжҺ§PCжңәдёҠзҡ„жҺ§еҲ¶иҪҜ件пјҢ并еҲ©з”Ёдё»гҖҒд»Һз«ҷзҡ„MCS-51зұ»еһӢзҡ„еҚ•зүҮжңәдҪңдёәйҖҡдҝЎжҺ§еҲ¶еҷЁгҖӮдёүеұӮд№Ӣй—ҙйҖҡиҝҮRSпјҚ485зҺ°еңәжҖ»зәҝиҝӣиЎҢзү©зҗҶй“ҫи·ҜиҝһжҺҘпјҢйҖҡиҝҮз”ұдё»з«ҷзәҝзЁӢи°ғеәҰе®һзҺ°д»Һз«ҷиҪ®е·Ўж—¶й—ҙеҸ–еҫ—еҲ’еҲҶпјҢе®һзҺ°еңЁзү№е®ҡж—¶й—ҙзүҮеҶ…дё»еҲ°зҒҜе…·XXд№Ӣй—ҙзҡ„зӮ№еҜ№зӮ№йҖҡдҝЎгҖӮ
гҖҖгҖҖ3 йҖҡдҝЎеҚҸи®®и®ҫи®ЎгҖҖ
гҖҖгҖҖйҖҡдҝЎеҚҸи®®зҡ„и®ҫи®ЎжҳҜзі»з»ҹи®ҫи®Ўзҡ„е…ій”®жҖ§й—®йўҳпјҢе…¶дҝЎжҒҜеё§зҡ„ж јејҸи®ҫи®ЎгҖҒй“ҫи·Ҝе»әз«Ӣж–№ејҸгҖҒж ЎйӘҢж–№жі•зӯүи®ҫи®ЎйғҪеҪұе“ҚеҲ°зі»з»ҹзҡ„е®һж—¶жҖ§дёҺеҸҜйқ жҖ§гҖӮдёӢйқўе°ұең°еқҖиҜҶеҲ«гҖҒеё§и®ҫи®ЎгҖҒж•°жҚ®еҢ…и®ҫи®ЎгҖҒд»ҘеҸҠйҖҡдҝЎй“ҫи·ҜиҝҮзЁӢеӣӣдёӘе…ій”®ж–№йқўиҝӣиЎҢи®Ёи®әгҖӮ
гҖҖгҖҖ3.1 ең°еқҖиҜҶеҲ«
гҖҖгҖҖең°еқҖиҜҶеҲ«еҸҜд»ҘйҮҮз”Ёж•°жҚ®еҢ…иҝҮж»Өзҡ„иҪҜ件иҜҶеҲ«жҲ–йҮҮз”Ёзү№е®ҡ硬件ең°еқҖиҜҶеҲ«гҖӮең°еқҖиҜҶеҲ«ж–№жі•зҡ„зЎ®е®ҡе’ҢиҪҜ件иҜҶеҲ«з®—жі•зҡ„и®ҫи®ЎпјҢе°ҶдёҘйҮҚеҪұе“Қзі»з»ҹзҡ„жӯЈзЎ®жҖ§е’ҢеҸҜйқ жҖ§гҖӮдёӨз§Қж–№жі•зҡ„йҖүз”ЁпјҢеҸ–еҶідәҺзі»з»ҹзҡ„е®һж—¶жҖ§иҰҒжұӮе’Ңзі»з»ҹйҮҮз”Ёзҡ„硬件结жһ„гҖӮ
гҖҖгҖҖжң¬зі»з»ҹдёӯжүҖйҮҮз”Ёзҡ„MCS-51еӨ„зҗҶеҷЁдё“й—ЁдёәеӨҡжңәйҖҡдҝЎи®ҫи®ЎдәҶдёҖдёӘдё“з”ЁSM2дҪҚпјҢдёәжӯӨеҸҜд»ҘеҲ©з”ЁзЎ¬д»¶иҜҶеҲ«пјҢе®һзҺ°еҹәдәҺең°еқҖ/ж•°жҚ®её§зҡ„еӨҡжңәйҖҡдҝЎгҖӮ
гҖҖгҖҖ3.2 ж•°жҚ®её§зҡ„и®ҫи®Ў
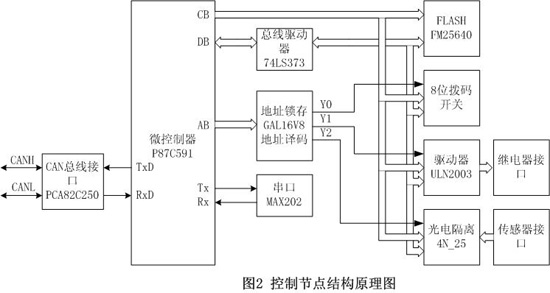
гҖҖгҖҖжң¬зі»з»ҹдёӯжҢүз…§д»ҘдёӢж јејҸеҸ‘йҖҒгҖӮеүҚ8дҪҚдёәиө·е§Ӣеӯ—иҠӮпјҢжҺҘзқҖдёәең°еқҖеӯ—иҠӮпјҢжҺҘзқҖдёәе‘Ҫд»Ө/ж•°жҚ®еӯ—иҠӮпјҢж ЎйӘҢеӯ—иҠӮпјҢжңҖеҗҺдёәеҒңжӯўеӯ—иҠӮгҖӮеё§ж јејҸеҰӮеӣҫ2жүҖзӨәгҖӮ
гҖҖгҖҖжӯӨзі»з»ҹдёӯзҡ„ж•°жҚ®её§еҲҶдёәдёүйғЁеҲҶпјҡе№ҝж’ӯеё§гҖҒең°еқҖеё§гҖӮж•°жҚ®её§гҖӮе№ҝж’ӯеё§жҳҜдё»жҺ§еҸ‘з»ҷжүҖжңүд»ҺжҺ§зҡ„дҝЎжҒҜеё§пјҢе…¶е®һд№ҹеҸҜд»ҘеҪ’зәіеҲ°ең°еқҖеё§еҶ…пјҢдҪҶжӯӨж—¶ең°еқҖдёәе№ҝж’ӯең°еқҖпјҢдё»иҰҒз”ЁдәҺзі»з»ҹеҸӮж•°и®ҫзҪ®пјҢж—¶й’ҹеҗҢжӯҘж—¶з”ЁдәҺжЈҖжөӢ计算延时зӯүпјӣең°еқҖеё§зҡ„и®ҫи®ЎжҳҜз”ЁдәҺең°еқҖиҜҶеҲ«е’Ңеә”зӯ”пјҢдёҖдёӘдё»жҺ§еҸҜжҺ§еҲ¶255дёӘзұ»еҲ«жҺ§еҲ¶еҷЁпјҢдёҖдёӘзұ»еҲ«жҺ§еҲ¶еҷЁеҸҲеҸҜд»Ҙй©ұеҠЁ255дёӘLEDзҒҜе…·гҖӮж•°жҚ®её§дё»иҰҒжҳҜе®ҢжҲҗе‘Ҫд»Өдј йҖҒпјҢеҸӮж•°дј иҫ“зӯүеҠҹиғҪгҖӮ
гҖҖгҖҖ3.3 ж•°жҚ®еҢ…зҡ„и®ҫи®Ў
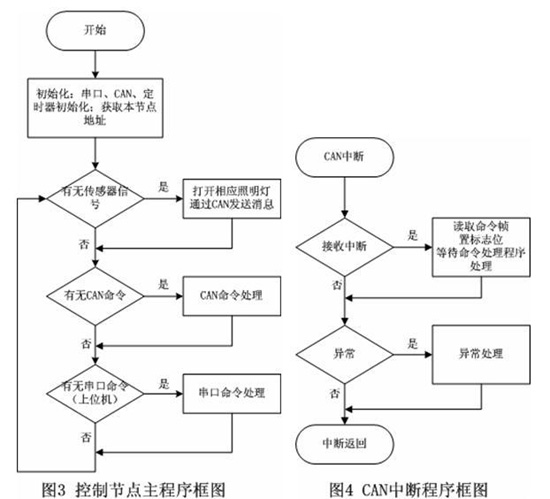
гҖҖгҖҖж•°жҚ®еҢ…зҡ„и®ҫи®ЎеҢ…жӢ¬её§зҡ„з»„з»Үж–№ејҸпјҢеҗ„з§ҚеҠҹиғҪз Ғи®ҫи®ЎгҖҒж ЎйӘҢз Ғи®ҫи®Ўд»ҘеҸҠж•°жҚ®и®ҫи®Ўй—®йўҳгҖӮж•°жҚ®еҢ…ж јејҸеҰӮеӣҫ3жүҖзӨәгҖӮеҠҹиғҪз”ұдёҠдёӢдҪҚжңәж №жҚ®жүҖйңҖдј иҫ“зҡ„еҸӮж•°зұ»еһӢгҖҒдёӘж•°пјҢд»ҘеҸҠзі»з»ҹеҜ№дёӢдҪҚжңәеҠҹиғҪи®ҫзҪ®жғ…еҶөиҖҢиҝӣиЎҢзәҰе®ҡпјҢжңүзү№ж®Ҡеӯ—з¬Ұд»ЈиЎЁзү№е®ҡзҡ„еҠҹиғҪз ҒеҰӮеӣҫ4жүҖзӨәгҖӮ
гҖҖгҖҖе…¶дёӯж ЎйӘҢз Ғзҡ„з”ҹжҲҗеҸ–еҶідәҺзі»з»ҹжүҖйҮҮз”Ёзҡ„еҚҸи®®пјҢеңЁжҹҗдёҖе…·дҪ“еңәжүҖеҸҜд»ҘйҖҡиҝҮзҺ°еңәи®ҫзҪ®жқҘйҖүжӢ©гҖӮжң¬зі»з»ҹйҮҮз”Ёзҡ„CRCж ЎйӘҢз ҒпјҢз”ҹжҲҗеӨҡйЎ№ејҸйҮҮз”ЁCRCпјҚ16пјҢиҜҘеӨҡйЎ№ејҸиғҪе…ЁйғЁжЈҖжҹҘеҮә16дҪҚеҸҠд»ҘдёӢзҡ„й”ҷиҜҜпјҢеҜ№16дҪҚд»ҘдёҠзҡ„жјҸжЈҖжҰӮзҺҮ0.003пј…пјҢе®Ңе…Ёж»Ўи¶ізі»з»ҹзҡ„иҰҒжұӮгҖӮ
гҖҖгҖҖ3.4 йҖҡдҝЎй“ҫи·Ҝзҡ„иҝҮзЁӢ
гҖҖгҖҖз”ұдәҺзҺ°еңәзҺҜеўғеӨҚжқӮпјҢиҜҘзі»з»ҹеҝ…йЎ»е…·жңүиҫғеҘҪзҡ„жҠ—е№Іжү°жҖ§гҖӮдёәдәҶдҝқиҜҒжҖ»зәҝдҝЎеҸ·зҡ„дј иҫ“дёҚдјҡеҮәзҺ°е»¶ж—¶гҖҒең°еқҖдҝЎеҸ·еҮәй”ҷгҖҒжҢҮд»ӨдҝЎеҸ·и·‘йЈһзӯүжғ…еҶөеҸ‘з”ҹпјҢйҖҡдҝЎйҮҮз”Ёдё»д»Һеә”зӯ”ж–№ејҸе’ҢзІҫзЎ®еҲ’еҲҶж—¶й—ҙж®өзҡ„йҖҡдҝЎиҪ®е·Ўж–№ејҸгҖӮйҖҡдҝЎй“ҫи·Ҝдё»иҰҒиҝҮзЁӢеҰӮеӣҫ5жүҖзӨәгҖӮдё»жҺ§йҰ–е…ҲеҸ‘йҖҒзұ»еҲ«жҺ§еҲ¶еҷЁзҡ„ең°еқҖеё§дҪңдёәжҸЎжүӢдҝЎеҸ·пјҢиў«еҜ»еқҖзҡ„зұ»еҲ«жҺ§еҲ¶еҷЁеә”зӯ”дё»жҺ§пјҢе»әз«Ӣй“ҫжҺҘгҖӮеңЁеҲӨж–ӯең°еқҖз¬ҰеҗҲеҗҺпјҢдё»жҺ§е°ұжҢүз…§е‘Ҫд»Өеҗ‘д»ҺжҺ§еҲ¶еҷЁдј иҫ“йҖӮеҗҲзҡ„ж•°жҚ®гҖӮ
гҖҖгҖҖ4 иҪҜ件жһ„жһ¶и®ҫи®Ў
гҖҖгҖҖдё»жҺ§еҲ¶иҪҜ件йҮҮз”ЁжЁЎеқ—еҢ–жһ„жһ¶и®ҫи®ЎгҖӮйҖҡиҝҮзҒөжҙ»зҡ„иҪҜ件жһ„жһ¶и®ҫи®ЎгҖҒеҗҲзҗҶзҡ„еҠҹиғҪжЁЎеқ—и®ҫи®ЎжқҘе®һзҺ°зі»з»ҹеӣҫеҪўзј–иҫ‘зҡ„еӨ„зҗҶеҸҠз®ЎзҗҶгҖӮдё»з«ҷиҪҜ件жҳҜеңЁWindows2000гҖҒVC++6.0д»ҘеҸҠFLAH MXзҡ„зҺҜеўғдёӢејҖеҸ‘иҖҢжҲҗзҡ„гҖӮдёӢйқўе°ұиҪҜ件жһ„жһ¶зҡ„еұӮж¬ЎжЁЎеһӢиҝӣиЎҢеҲҶжһҗгҖӮ
гҖҖгҖҖжҺ§еҲ¶иҪҜ件系з»ҹжһ„е»әзҡ„еұӮж¬ЎжЁЎеһӢеҲҶдёәдёүеұӮпјҡз•ҢйқўдәӨдә’еұӮгҖҒж•°жҚ®еӨ„зҗҶеұӮгҖҒж•°жҚ®дј иҫ“еұӮгҖӮ
гҖҖгҖҖеңЁжЁЎеһӢдёӯпјҢз•ҢйқўдәӨдә’еұӮдёәеҸӢеҘҪзҡ„дё»дәәжңәдәӨдә’з•ҢйқўпјҢе®ғеҗ‘з”ЁжҲ·жҸҗдҫӣж•ҙеҘ—зі»з»ҹзҡ„иҝҗиЎҢжғ…еҶөгҖҒжҺ§еҲ¶еҷЁзҡ„иҝҗиЎҢжғ…еҶөгҖҒзҒҜе…үж•Ҳжһңзј–иҫ‘гҖҒзі»з»ҹеҸӮж•°зҡ„и®ҫе®ҡгҖӮж•°жҚ®еӨ„зҗҶеұӮжҳҜдәӨдә’еұӮе’Ңдј иҫ“еұӮзҡ„жЎҘжўҒпјҢиҜҘеұӮж №жҚ®дёҠеұӮзҡ„и®ҫе®ҡпјҢиҝӣиЎҢзӣёе…іж•°жҚ®дҝЎжҒҜзҡ„еӨ„зҗҶпјҢ并е°ҶдёӢеұӮеҸҚйҰҲж•°жҚ®иҝӣиЎҢеӨ„зҗҶеҗҺдј йҖҒеҲ°дәӨдә’еұӮгҖӮдј иҫ“еұӮе°ҶйҖҡиҝҮж•°жҚ®еҚҸи®®гҖҒз»„з»ҮжҲҗеё§гҖҒжү“еҢ…пјҢйҖҡиҝҮйҖҡдҝЎзү©зҗҶеұӮеҸ‘йҖҒз»ҷдё»жҺ§еҲ¶еҷЁпјҢ并继з»ӯеҲҶй…Қж•°жҚ®гҖӮ
гҖҖгҖҖ5 з»“жқҹиҜӯ
гҖҖгҖҖжң¬жҺ§еҲ¶зі»з»ҹжҳҜдёҖз§ҚеҹәдәҺRS-485зҺ°еңәжҖ»зәҝзҡ„LEDеӨңжҷҜз…§жҳҺжҺ§еҲ¶зі»з»ҹгҖӮдёҖж–№йқўпјҢиҜҘзі»з»ҹжҸҗеҚҮдәҶеӨңжҷҜз…§жҳҺи®ҫи®Ўзҡ„ж°ҙеҮҶгҖҒ延й•ҝдәҶзҒҜе…·зҡ„дҪҝз”ЁеҜҝе‘ҪпјӣеҸҰдёҖж–№йқўпјҢз”ұдәҺиҜҘзі»з»ҹзҡ„жЁЎеқ—жһ„件е®һзҺ°дәҶдёҖе®ҡзҡ„йҖҡз”ЁжҖ§е’ҢеӨҚз”ЁжҖ§пјҢеҜ№дёӯе°ҸеһӢдјҒдёҡе…·жңүиҫғеҘҪзҡ„з»ҸжөҺйҖӮз”ЁжҖ§гҖӮ
е…ҚиҙЈеЈ°жҳҺ/зүҲжқғз”іжҳҺ Passiontech
жүҖжңүж–Үз« дёәзҪ‘дёҠжҗңйӣҶжҲ–з§ҒдёӢдәӨжөҒеӯҰд№ д№Ӣз”ЁпјҢд»»дҪ•ж¶үеҸҠе•ҶдёҡзӣҲеҲ©зӣ®зҡ„еқҮдёҚеҫ—дҪҝз”ЁпјҢеҗҰеҲҷдә§з”ҹзҡ„дёҖеҲҮеҗҺжһңз”ұжӮЁиҮӘе·ұжүҝжӢ…!
жң¬з«ҷд»…д»…жҸҗдҫӣдёҖдёӘи§Ӯж‘©еӯҰд№ зҡ„зҺҜеўғпјҢе°ҶдёҚеҜ№д»»дҪ•иө„жәҗиҙҹжі•еҫӢиҙЈд»»гҖӮжүҖжңүиө„жәҗиҜ·еңЁдёӢиҪҪеҗҺ24е°Ҹж—¶еҶ…еҲ йҷӨгҖӮ
иӢҘж— ж„ҸдёӯдҫөзҠҜеҲ°жӮЁзҡ„зүҲжқғеҲ©зӣҠпјҢиҜ·жқҘдҝЎиҒ”зі»жҲ‘们пјҢжҲ‘们дјҡеңЁж”¶еҲ°дҝЎжҒҜдёүеӨ©еҶ…з»ҷдәҲеӨ„зҗҶ!
|  收и—ҸзҒөзҢ«зҪ‘
收и—ҸзҒөзҢ«зҪ‘












![[CANжөӢиҜ•]-иҪҰз”ЁCANжҖ»зәҝжөӢиҜ•е№іеҸ°зҡ„](http://51lm.cn/UploadFile/art_spic/PXF_10918.jpg "[CANжөӢиҜ•]-иҪҰз”ЁCANжҖ»зәҝжөӢиҜ•е№іеҸ°зҡ„")

