ж‘ҳ иҰҒ
и®Ўз®—жңәе·Іеә”з”ЁеҲ°дәәзұ»з”ҹжҙ»зҡ„еҗ„дёӘж–№йқўгҖӮеҲ©з”Ёи®Ўз®—жңәеҜ№жҺ§еҲ¶зі»з»ҹиҝӣиЎҢд»ҝзңҹе’ҢеҲҶжһҗгҖӮMATLABдҪңдёәйқўеҗ‘科еӯҰдёҺе·ҘзЁӢи®Ўз®—зҡ„й«ҳзә§иҜӯиЁҖгҖӮзү№еҲ«жҳҜд»ҘMATLAB/SimulinkзҺҜеўғдёәеҹәзЎҖзҡ„е®һз”Ёе·Ҙе…·з®ұпјҲеҰӮжҺ§еҲ¶зі»з»ҹе·Ҙе…·з®ұгҖҒйҖҡдҝЎжЁЎеқ—е·Ҙе…·з®ұгҖҒж•°еӯ—дҝЎеҸ·еӨ„зҗҶжЁЎеқ—е·Ҙе…·з®ұгҖҒйқһзәҝжҖ§жҺ§еҲ¶жЁЎеқ—е·Ҙе…·з®ұгҖҒе®ҡзӮ№еӨ„зҗҶжЁЎеқ—е·Ҙе…·з®ұгҖҒзҠ¶жҖҒжөҒгҖҒзі»з»ҹиҫЁиҜҶе·Ҙе…·з®ұгҖҒзҘһз»ҸзҪ‘з»ңжЁЎеқ—е·Ҙе…·з®ұгҖҒжЁЎзіҠе·Ҙе…·з®ұзӯүпјүгҖӮMATLABеңЁе·ҘзЁӢжҠҖжңҜдёҠзҡ„йҮҚиҰҒеә”з”ЁжҳҜе®ғзҡ„ејәеӨ§зҡ„зі»з»ҹе»әжЁЎе’Ңд»ҝзңҹиғҪеҠӣгҖӮ[1]
е…ій”®еӯ—пјҡSimulinkпјӣд»ҝзңҹпјӣеә”з”Ё
еј•иЁҖпјҡ
SimulinkжҳҜMATLABжңҖйҮҚиҰҒзҡ„组件д№ӢдёҖпјҢе®ғжҸҗдҫӣдёҖдёӘеҠЁжҖҒзі»з»ҹе»әжЁЎгҖҒд»ҝзңҹе’Ңз»јеҗҲеҲҶжһҗзҡ„йӣҶжҲҗзҺҜеўғгҖӮеңЁиҜҘзҺҜеўғдёӯпјҢж— йңҖеӨ§йҮҸд№ҰеҶҷзЁӢеәҸпјҢиҖҢеҸӘйңҖиҰҒйҖҡиҝҮз®ҖеҚ•зӣҙи§Ӯзҡ„йј ж Үж“ҚдҪңпјҢе°ұеҸҜжһ„йҖ еҮәеӨҚжқӮзҡ„зі»з»ҹгҖӮSimulinkе…·жңүйҖӮеә”йқўе№ҝгҖҒз»“жһ„е’ҢжөҒзЁӢжё…жҷ°еҸҠд»ҝзңҹзІҫз»ҶгҖҒиҙҙиҝ‘е®һйҷ…гҖҒж•ҲзҺҮй«ҳгҖҒзҒөжҙ»зӯүдјҳзӮ№пјҢ并еҹәдәҺд»ҘдёҠдјҳзӮ№Simulinkе·Іиў«е№ҝжіӣеә”з”ЁдәҺжҺ§еҲ¶зҗҶи®әе’Ңж•°еӯ—дҝЎеҸ·еӨ„зҗҶзҡ„еӨҚжқӮд»ҝзңҹе’Ңи®ҫи®ЎгҖӮеҗҢж—¶жңүеӨ§йҮҸзҡ„第дёүж–№иҪҜ件е’Ң硬件еҸҜеә”з”ЁдәҺжҲ–иў«иҰҒжұӮеә”з”ЁдәҺSimulinkгҖӮ
гҖҖгҖҖSimulinkжҳҜMATLABдёӯзҡ„дёҖз§ҚеҸҜи§ҶеҢ–д»ҝзңҹе·Ҙе…·пјҢжҳҜдёҖз§ҚеҹәдәҺMATLABзҡ„жЎҶеӣҫи®ҫи®ЎзҺҜеўғпјҢжҳҜе®һзҺ°еҠЁжҖҒзі»з»ҹе»әжЁЎгҖҒд»ҝзңҹе’ҢеҲҶжһҗзҡ„дёҖдёӘиҪҜ件еҢ…пјҢиў«е№ҝжіӣеә”з”ЁдәҺзәҝжҖ§зі»з»ҹгҖҒйқһзәҝжҖ§зі»з»ҹгҖҒж•°еӯ—жҺ§еҲ¶еҸҠж•°еӯ—дҝЎеҸ·еӨ„зҗҶзҡ„е»әжЁЎе’Ңд»ҝзңҹдёӯгҖӮSimulinkеҸҜд»Ҙз”Ёиҝһз»ӯйҮҮж ·ж—¶й—ҙгҖҒзҰ»ж•ЈйҮҮж ·ж—¶й—ҙжҲ–дёӨз§Қж··еҗҲзҡ„йҮҮж ·ж—¶й—ҙиҝӣиЎҢе»әжЁЎпјҢе®ғд№ҹж”ҜжҢҒеӨҡйҖҹзҺҮзі»з»ҹпјҢд№ҹе°ұжҳҜзі»з»ҹдёӯзҡ„дёҚеҗҢйғЁеҲҶе…·жңүдёҚеҗҢзҡ„йҮҮж ·йҖҹзҺҮгҖӮдёәдәҶеҲӣе»әеҠЁжҖҒзі»з»ҹжЁЎеһӢпјҢSimulinkжҸҗдҫӣдәҶдёҖдёӘе»әз«ӢжЁЎеһӢж–№еқ—еӣҫзҡ„еӣҫеҪўз”ЁжҲ·жҺҘеҸЈ(GUI) пјҢиҝҷдёӘеҲӣе»әиҝҮзЁӢеҸӘйңҖеҚ•еҮ»е’ҢжӢ–еҠЁйј ж Үж“ҚдҪңе°ұиғҪе®ҢжҲҗпјҢе®ғжҸҗдҫӣдәҶдёҖз§Қжӣҙеҝ«жҚ·гҖҒзӣҙжҺҘжҳҺдәҶзҡ„ж–№ејҸпјҢиҖҢдё”з”ЁжҲ·еҸҜд»Ҙз«ӢеҚізңӢеҲ°зі»з»ҹзҡ„д»ҝзңҹз»“жһңгҖӮ
гҖҖ Simulink®жҳҜз”ЁдәҺеҠЁжҖҒзі»з»ҹе’ҢеөҢе…ҘејҸзі»з»ҹзҡ„еӨҡйўҶеҹҹд»ҝзңҹе’ҢеҹәдәҺжЁЎеһӢзҡ„и®ҫи®Ўе·Ҙе…·гҖӮеҜ№еҗ„з§Қж—¶еҸҳзі»з»ҹпјҢеҢ…жӢ¬йҖҡи®ҜгҖҒжҺ§еҲ¶гҖҒдҝЎеҸ·еӨ„зҗҶгҖҒи§Ҷйў‘еӨ„зҗҶе’ҢеӣҫеғҸеӨ„зҗҶзі»з»ҹпјҢSimulinkжҸҗдҫӣдәҶдәӨдә’ејҸеӣҫеҪўеҢ–зҺҜеўғе’ҢеҸҜе®ҡеҲ¶жЁЎеқ—еә“жқҘеҜ№е…¶иҝӣиЎҢи®ҫи®ЎгҖҒд»ҝзңҹгҖҒжү§иЎҢе’ҢжөӢиҜ•гҖӮ.
гҖҖгҖҖжһ„жһ¶еңЁSimulinkеҹәзЎҖд№ӢдёҠзҡ„е…¶д»–дә§е“Ғжү©еұ•дәҶSimulinkеӨҡйўҶеҹҹе»әжЁЎеҠҹиғҪпјҢд№ҹжҸҗдҫӣдәҶз”ЁдәҺи®ҫи®ЎгҖҒжү§иЎҢгҖҒйӘҢиҜҒе’ҢзЎ®и®Өд»»еҠЎзҡ„зӣёеә”е·Ҙе…·гҖӮSimulinkдёҺMATLAB® зҙ§еҜҶйӣҶжҲҗпјҢеҸҜд»ҘзӣҙжҺҘи®ҝй—®MATLABеӨ§йҮҸзҡ„е·Ҙе…·жқҘиҝӣиЎҢз®—жі•з ”еҸ‘гҖҒд»ҝзңҹзҡ„еҲҶжһҗе’ҢеҸҜи§ҶеҢ–гҖҒжү№еӨ„зҗҶи„ҡжң¬зҡ„еҲӣе»әгҖҒе»әжЁЎзҺҜеўғзҡ„е®ҡеҲ¶д»ҘеҸҠдҝЎеҸ·еҸӮж•°е’ҢжөӢиҜ•ж•°жҚ®зҡ„е®ҡд№үгҖӮ[2]
дёҖгҖҒSimulink д»ҝзңҹеңЁжҺ§еҲ¶зі»з»ҹдёӯзҡ„еә”з”Ё [3]
еҹәдәҺSimulinkзҺҜеўғзҡ„жҺ§еҲ¶зі»з»ҹзҡ„и®ҫи®ЎжӯҘйӘӨдёәпјҡ
гҖҖгҖҖпјҲ1пјү ж №жҚ®зі»з»ҹзҡ„е®һйҷ…жғ…еҶөе»әз«Ӣж•°еӯҰжЁЎеһӢпјӣ
гҖҖгҖҖпјҲ2пјү з”ЁMATLABзҡ„еҮҪж•°е·Ҙе…·еҜ№иҜҘжЁЎеһӢжұӮи§Јпјӣ
гҖҖгҖҖпјҲ3пјү е»әз«ӢSimulinkжЁЎеһӢпјҢиҝӣиЎҢд»ҝзңҹ并еҲҶжһҗз»“жһң
гҖҖгҖҖпјҲ4пјү жҠҠз»“жһңеҸҚйҰҲеҲ°жҺ§еҲ¶зі»з»ҹзҡ„и®ҫи®ЎдёҠгҖӮ
гҖҖгҖҖSimulinkжЁЎеһӢйҖҡеёёз”ұдёүйғЁеҲҶз»„жҲҗпјҡиҫ“е…ҘдҝЎеҸ·жәҗпјҲSourceпјүгҖҒзі»з»ҹпјҲSystemпјүгҖҒжҺҘ收模еқ—пјҲSinkпјүз»„жҲҗпјҢеҰӮеӣҫ1жүҖзӨәгҖӮ
гҖҖгҖҖ
1пјҺдёҖдёӘиҝһз»ӯзі»з»ҹзҡ„д»ҝзңҹе®һзҺ°е®һдҫӢ
гҖҖгҖҖеңЁMATLABзҡ„Simulinkеҹәжң¬жЁЎеқ—дёӯпјҢеҢ…еҗ«жңү9дёӘеӯҗжЁЎеқ—еә“пјҢеҲҶеҲ«жҳҜиҝһз»ӯзі»з»ҹ(Continuous)гҖҒйқһиҝһз»ӯзі»з»ҹ(Discontinuous)гҖҒзҰ»ж•Јзі»з»ҹ(Discrete)гҖҒжҹҘйҳ…иЎЁ(Look-up Tables)гҖҒж•°еӯҰиҝҗз®—(Math Openations)гҖҒжЁЎеһӢзЎ®и®Ө(Model Verification)гҖҒе®ҪжЁЎеһӢеҠҹиғҪ(Model-wideUtilities)гҖҒдҝЎеҸ·зәҝи·Ҝе®үжҺ’(Signals Routing)гҖҒжҺҘ收模еқ—(Sinks)гҖҒиҫ“е…ҘдҝЎеҸ·жәҗ(Sources)е’Ңз«ҜеҸЈдёҺеӯҗзі»з»ҹ(Ports & Subsystems)гҖӮз”ұиҝҷдәӣеҹәжң¬жЁЎеҫҲе®№жҳ“е®һзҺ°жҺ§еҲ¶зі»з»ҹзҡ„д»ҝзңҹгҖӮдҪҝз”ЁSimulinkиҝӣиЎҢд»ҝзңҹзҡ„жӯҘйӘӨеҰӮдёӢ пјҲ1пјүзЎ®е®ҡд»ҝзңҹзҡ„иҫ“е…ҘдҝЎеҸ·жәҗгҖҒзі»з»ҹе’Ңиҫ“еҮәдҝЎеҸ·е№¶з”ұжӯӨе»әз«ӢSimulinkжЁЎеһӢпјӣ
пјҲ2пјү и®ҫзҪ®д»ҝзңҹеҸӮж•°пјӣ
пјҲ3пјү иҝӣиЎҢеҠЁжҖҒд»ҝзңҹ并иҫ“е…Ҙз»“жһңгҖӮ
гҖҖгҖҖдёӢйқўд»Ҙе»әз«ӢдёҖдёӘдәҢйҳ¶зі»з»ҹзҡ„д»ҝзңҹжЁЎеһӢдёәдҫӢжқҘиҜҙжҳҺе…¶е®һзҺ°иҝҮзЁӢгҖӮпјҲи®ҫзі»з»ҹзҡ„дј йҖ’еҮҪж•°дёәпјҡ пјү
пјү
ж–№жі•дёҖпјҡдҪҝз”Ёдј йҖ’еҮҪж•°жЁЎеһӢ
пјҲ1пјү зЎ®з«Ӣиҫ“е…ҘдҝЎеҸ·жәҗдҪҝз”Ёйҳ¶и·ғдҝЎеҸ·StepпјҢзі»з»ҹзҡ„ејҖзҺҜдј йҖ’еҮҪж•°дёәпјҢжҺҘеҸ—жЁЎеқ—дҪҝз”ЁзӨәжіўеҷЁScopeгҖӮжү“ејҖSimulinkжЁЎеқ—еә“жөҸи§ҲеҷЁпјҢйҖүжӢ©StepгҖҒSumгҖҒTransferFcnе’ҢScopeеӣӣдёӘжЁЎеқ—пјҢ并жӯЈзЎ®ең°еҜ№е®ғ们зҡ„дҝЎеҸ·зәҝиҝӣиЎҢиҝһжҺҘпјҢе»әз«ӢеҰӮеӣҫ2жүҖзӨәзҡ„зі»з»ҹжЁЎеһӢгҖӮ
пјҲ2пјү и®ҫзҪ®жЁЎеқ—еҸӮж•°гҖӮж №жҚ®йўҳзӣ®иҰҒжұӮпјҢе°ҶStepжЁЎеқ—зҡ„вҖңStep timeвҖқеұһжҖ§еҖји®ҫзҪ®дёә0пјҢе°ҶSumжЁЎеқ—зҡ„вҖңList of SignsвҖқеұһжҖ§еҖји®ҫзҪ®дёәвҖң|+ -вҖқпјҢе°ҶTransfer FcnжЁЎеқ—зҡ„еұһжҖ§пјҡеҲҶжҜҚеӨҡйЎ№ејҸвҖңDenominatorвҖқеҖји®ҫзҪ®дёәвҖң[1 0.6 0]
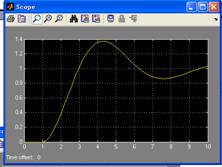
пјҲ3пјү иҝҗиЎҢд»ҝзңҹпјҢеңЁзӨәжіўеҷЁдёҠеҫ—еҲ°еҰӮеӣҫ3жүҖзӨәзҡ„йҳ¶и·ғе“Қеә”гҖӮпјҲstop time=15пјү
гҖҖгҖҖ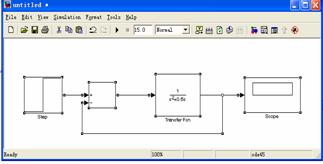
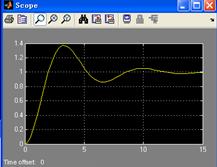
гҖҖгҖҖ еӣҫ2 дәҢйҳ¶зі»з»ҹжЁЎеһӢпјҲдј йҖ’жЁЎеһӢпјү еӣҫ3 зӨәжіўеҷЁжҳҫзӨәзҡ„д»ҝзңҹе®һйӘҢз»“жһң
гҖҖгҖҖ
ж–№жі•дәҢпјҡдҪҝз”Ёйӣ¶-жһҒзӮ№жЁЎеһӢ
гҖҖгҖҖпјҲ1пјү зЎ®з«Ӣиҫ“е…ҘдҝЎеҸ·жәҗдҪҝз”Ёйҳ¶и·ғдҝЎеҸ·Stepпјӣзі»з»ҹдҪҝз”Ёз§ҜеҲҶжЁЎеқ—пјҲIntegratorпјүе’Ңйӣ¶жһҒзӮ№жЁЎеһӢпјҲZero-PoleпјүдёІиҒ”пјҢеҸҚйҰҲдҪҝз”ЁвҖңGainвҖқжЁЎеқ—жһ„жҲҗеҸҚйҰҲеўһзҺҜзҡ„еўһзӣҠдёә-1пјӣжҺҘеҸ—жЁЎеқ—дҪҝз”ЁзӨәжіўеҷЁScopeгҖӮжү“ејҖSimulinkжЁЎеқ—еә“жөҸи§ҲеҷЁпјҢдҫқж¬ЎйҖүжӢ©StepгҖҒSumгҖҒIntegratorгҖҒZero-PoleгҖҒGainе’ҢScopeе…ӯдёӘжЁЎеқ—пјҢ并жӯЈзЎ®ең°еҜ№е®ғ们зҡ„дҝЎеҸ·зәҝиҝӣиЎҢиҝһжҺҘпјҢе»әз«ӢеҰӮеӣҫ4жүҖзӨәзҡ„зі»з»ҹжЁЎеһӢгҖӮ
гҖҖгҖҖпјҲ2пјү и®ҫзҪ®жЁЎеқ—еҸӮж•°гҖӮж №жҚ®йўҳзӣ®иҰҒжұӮпјҢе°ҶStepжЁЎеқ—зҡ„вҖңStep timeвҖқеұһжҖ§еҖји®ҫзҪ®дёә0пјӣе°ҶвҖңZero-PoleвҖқжЁЎеқ—зҡ„вҖңZeroвҖқж Ҹж”№дёәвҖң[ ]вҖқпјҢе°ҶвҖңPolesвҖқж Ҹж”№дёә[-0.6]пјӣе°ҶGainжЁЎеқ—зҡ„вҖңGainвҖқеҸӮж•°еҖјж”№дёә-1гҖӮе…¶е®ғеҸӮж•°дёҚеҸҳгҖӮ
гҖҖгҖҖпјҲ3пјү иҝҗиЎҢд»ҝзңҹпјҢеңЁзӨәжіўеҷЁдёҠеҫ—еҲ°еҰӮеӣҫ5жүҖзӨәзҡ„йҳ¶и·ғе“Қеә”гҖӮ(stop time=10)
гҖҖгҖҖ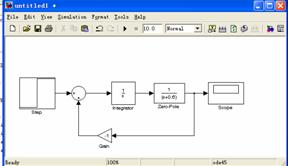
гҖҖгҖҖ еӣҫ4 дәҢйҳ¶зі»з»ҹжЁЎеһӢпјҲйӣ¶-жһҒзӮ№жЁЎеһӢпјү еӣҫ5 зӨәжіўеҷЁжҳҫзӨәзҡ„д»ҝзңҹе®һйӘҢз»“жһң
дәҢгҖҒSimulink д»ҝзңҹеңЁж•°еӯҰи®Ўз®—дёӯзҡ„еә”з”Ё [4]
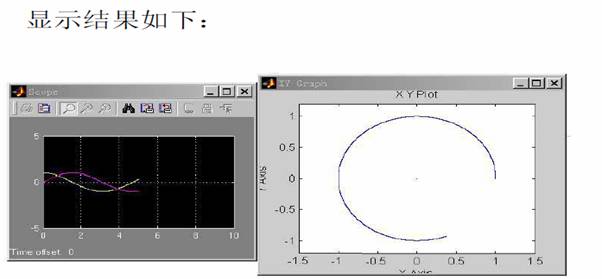
дҫӢ1 еҠЁжҖҒз”»еңҶпјҡ
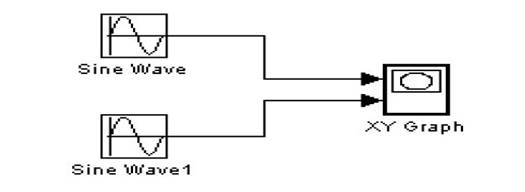
(1) x=cost,y=sint; (з”ЁжӯЈејҰжіўеҸ‘з”ҹеҷЁSine Wave)
еҸҢеҮ»еӣҫж ҮеҮәзҺ°зӣёеә”зҡ„жЁЎеқ—еҸӮж•°жЎҶ, еҸҜеңЁе…¶дёӯи®ҫзҪ®еҸӮж•°.
Sine WaveдёӯPhase(зӣёдҪҚ)дёәpi/2, е®һйҷ…дёәcost; Sine Wave1дёӯPhaseдёә0.
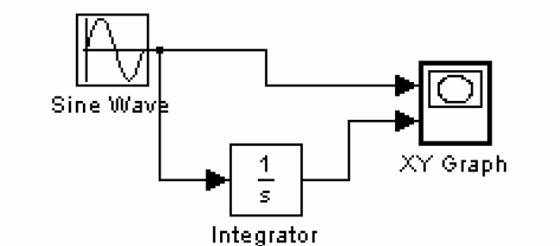
(2 x=cost,y=вҲ«t x(t)dt; (з”ЁжӯЈејҰжіўеҸ‘з”ҹеҷЁSine Waveе’Ңз§ҜеҲҶеҷЁIntegrator
Sine WaveдёӯPhase(зӣёдҪҚ)дёәpi/2, е®һйҷ…дёәcost; IntegratorдёӯInitial condition(еҲқе§ӢеҖј)дёә0.
XY Graphдёӯ, xзҡ„иҢғеӣҙдёәвҲ’1.5~1.5, yзҡ„иҢғеӣҙдёәвҲ’1.2~1.2.
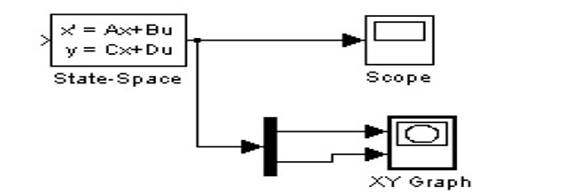
(2) (з”ЁзҠ¶жҖҒз©әй—ҙState-Space)State-Spaceдёӯ, A=[0,вҲ’1;1,0], B=[0;0], C=[1,0;0,1], D=[0;0]. Initial conditionsдёә[1;0].
еҸҢеҮ»XY Graphеӣҫж Ү, еҸҜе®ҡxзҡ„иҢғеӣҙдёәвҲ’1.5~1.5, yзҡ„иҢғеӣҙдёәвҲ’1.2~1.2. Scopeзҡ„yеҲ»еәҰеҸҜеҸіеҮ»зӨәжіўеҷЁеҲ»еәҰеҢәеҮәзҺ°еҜ№иҜқжЎҶ, иҝӣе…ҘAxesPropetiesзӘ—еҸЈзЎ®е®ҡ.
дёүгҖҒSimulink д»ҝзңҹеңЁи®Ўз®—дёӯзҡ„еә”з”Ё [4]
дҫӢпјҡйЈҹйҘө-жҚ•йЈҹиҖ…жЁЎеһӢ:
и®ҫйЈҹйҘө(еҰӮйұј, е…”зӯү)ж•°йҮҸдёәx(t), жҚ•йЈҹиҖ…(еҰӮйІЁйұј, зӢјзӯү)ж•°йҮҸдёәy(t), жңү

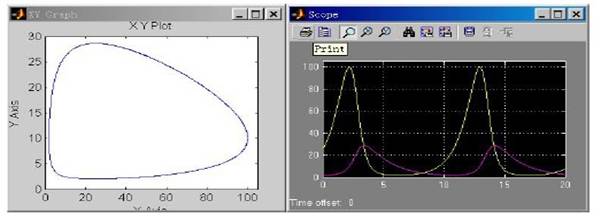
и®ҫx=1, d= 0.5, a= 0.1, b= 0.02, x(0) = 25, y(0) = 2. жұӮx(t), y(t)е’Ңy(x)зҡ„еӣҫеҪў
з”ЁSimulink
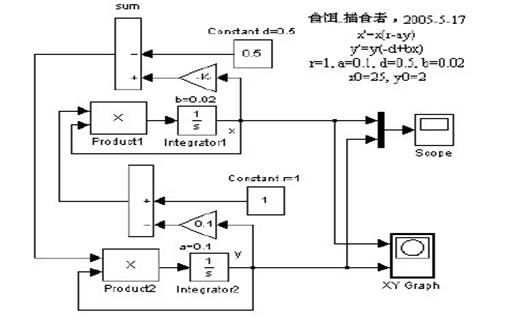
жҳҫзӨәз»“жһңеҰӮдёӢпјҡ
еӣӣгҖҒз»“жқҹиҜӯ
гҖҖ еҹәдәҺMATLAB/SimulinkзҺҜеўғзҡ„д»ҝзңҹеҲҶжһҗж–№жі•пјҢйҖҡиҝҮSimulinkе·Ҙе…·з®ұжүҖжҸҗдҫӣзҡ„еҹәжң¬жЁЎеқ—пјҢеҜ№еҗ„з§ҚеҜ№иұЎиҝӣиЎҢиҝһзәҝе’ҢжӯЈзЎ®и®ҫзҪ®еҸӮж•°пјҢдёҚйңҖиҰҒзј–зЁӢпјҢе°ұиғҪеҫҲе®№жҳ“е®һзҺ°еҜ№жҺ§еҲ¶зі»з»ҹгҖҒж•°еӯҰгҖҒи®Ўз®—зӯүзҡ„д»ҝзңҹжЁЎжӢҹпјҢе®һзҺ°и®Ўз®—жңәиҫ…еҠ©и®ҫи®ЎгҖӮиҜҘж–№жі•д»Һзі»з»ҹе»әжЁЎеҲ°зі»з»ҹзҡ„еҲҶжһҗе’Ңд»ҝзңҹпјҢе…ЁиҝҮзЁӢйғҪжҳҜеҸҜи§ҶеҢ–ж“ҚдҪңпјҢеҜ№дәҺжҸҗй«ҳжҺ§еҲ¶зі»з»ҹзҡ„и®ҫи®Ўж•ҲзҺҮе’Ңи®ҫи®ЎиҙЁйҮҸпјҢйғҪжңүзқҖйҮҚиҰҒзҡ„дҪңз”ЁгҖӮзӣ®еүҚе·Іе№ҝжіӣеә”з”ЁдәҺз”өеҠӣзі»з»ҹгҖҒж•°еӯҰгҖҒи®Ўз®—зӯүеҗ„ж–№йқўзҡ„и®ҫи®ЎдёӯгҖӮ
е…ҚиҙЈеЈ°жҳҺ/зүҲжқғз”іжҳҺ Passiontech
жүҖжңүж–Үз« дёәзҪ‘дёҠжҗңйӣҶжҲ–з§ҒдёӢдәӨжөҒеӯҰд№ д№Ӣз”ЁпјҢд»»дҪ•ж¶үеҸҠе•ҶдёҡзӣҲеҲ©зӣ®зҡ„еқҮдёҚеҫ—дҪҝз”ЁпјҢеҗҰеҲҷдә§з”ҹзҡ„дёҖеҲҮеҗҺжһңз”ұжӮЁиҮӘе·ұжүҝжӢ…!
жң¬з«ҷд»…д»…жҸҗдҫӣдёҖдёӘи§Ӯж‘©еӯҰд№ зҡ„зҺҜеўғпјҢе°ҶдёҚеҜ№д»»дҪ•иө„жәҗиҙҹжі•еҫӢиҙЈд»»гҖӮжүҖжңүиө„жәҗиҜ·еңЁдёӢиҪҪеҗҺ24е°Ҹж—¶еҶ…еҲ йҷӨгҖӮ
иӢҘж— ж„ҸдёӯдҫөзҠҜеҲ°жӮЁзҡ„зүҲжқғеҲ©зӣҠпјҢиҜ·жқҘдҝЎиҒ”зі»жҲ‘们пјҢжҲ‘们дјҡеңЁж”¶еҲ°дҝЎжҒҜдёүеӨ©еҶ…з»ҷдәҲеӨ„зҗҶ!
д»ҝзңҹе®һйӘҢ
 收и—Ҹи‘©жҳҹ
收и—Ҹи‘©жҳҹ





 400-878-1895
400-878-1895


![[CANжөӢиҜ•]-иҪҰз”ЁCANжҖ»зәҝжөӢиҜ•е№іеҸ°зҡ„](http://51lm.cn/UploadFile/art_spic/PXF_10918.jpg "[CANжөӢиҜ•]-иҪҰз”ЁCANжҖ»зәҝжөӢиҜ•е№іеҸ°зҡ„")

