1 з»Әи®ә
1.1 йўҳзӣ®иғҢжҷҜгҖҒз ”з©¶ж„Ҹд№ү
MATLABиҜӯиЁҖжҳҜеҪ“д»ҠеӣҪйҷ…жҺ§еҲ¶з•ҢжңҖдёәжөҒиЎҢзҡ„жҺ§еҲ¶зі»з»ҹи®Ўз®—жңәиҫ…еҠ©и®ҫи®ЎиҜӯиЁҖпјҢе®ғзҡ„еҮәзҺ°дёәжҺ§еҲ¶зі»з»ҹзҡ„и®Ўз®—жңәиҫ…еҠ©еҲҶжһҗе’Ңи®ҫи®ЎеёҰжқҘдәҶе…Ёж–°зҡ„жүӢж®өгҖӮе…¶дёӯеӣҫеҪўдәӨдә’ејҸзҡ„жЁЎеһӢиҫ“е…Ҙи®Ўз®—жңәд»ҝзңҹзҺҜеўғSIMULINKпјҢдёәMATLABеә”з”Ёзҡ„иҝӣдёҖжӯҘжҺЁе№ҝиө·еҲ°дәҶз§ҜжһҒзҡ„жҺЁеҠЁдҪңз”ЁгҖӮзҺ°еңЁпјҢMATLABиҜӯиЁҖе·Із»ҸйЈҺйқЎе…Ёдё–з•ҢпјҢжҲҗдёәжҺ§еҲ¶зі»з»ҹCADйўҶеҹҹжңҖжҷ®еҸҠгҖҒд№ҹжҳҜжңҖеҸ—ж¬ўиҝҺзҡ„иҪҜ件зҺҜеўғгҖӮ
йҡҸзқҖи®Ўз®—жңәжҠҖжңҜзҡ„еҸ‘еұ•е’Ңеә”з”ЁпјҢиҮӘеҠЁжҺ§еҲ¶зҗҶи®әе’ҢжҠҖжңҜеңЁе®ҮиҲӘгҖҒжңәеҷЁдәәжҺ§еҲ¶гҖҒеҜјеј№еҲ¶еҜјеҸҠж ёеҠЁеҠӣзӯүй«ҳж–°жҠҖжңҜйўҶеҹҹдёӯзҡ„еә”з”Ёд№ҹж„ҲжқҘж„Ҳж·ұе…Ҙе№ҝжіӣгҖӮдёҚд»…еҰӮжӯӨпјҢиҮӘеҠЁжҺ§еҲ¶жҠҖжңҜзҡ„еә”з”ЁиҢғеӣҙзҺ°еңЁе·Іжү©еұ•еҲ°з”ҹзү©гҖҒеҢ»еӯҰгҖҒзҺҜеўғгҖҒз»ҸжөҺз®ЎзҗҶе’Ңе…¶е®ғи®ёеӨҡзӨҫдјҡз”ҹжҙ»йўҶеҹҹдёӯпјҢжҲҗдёәзҺ°д»ЈзӨҫдјҡз”ҹжҙ»дёӯдёҚеҸҜзјәе°‘зҡ„дёҖйғЁеҲҶгҖӮйҡҸзқҖж—¶д»ЈиҝӣжӯҘе’Ңдәә们з”ҹжҙ»ж°ҙе№ізҡ„жҸҗй«ҳпјҢеңЁдәәзұ»жҺўзҹҘжңӘжқҘпјҢи®ӨиҜҶе’Ңж”№йҖ иҮӘ然пјҢе»әи®ҫй«ҳеәҰж–ҮжҳҺе’ҢеҸ‘иҫҫзӨҫдјҡзҡ„жҙ»еҠЁдёӯпјҢиҮӘеҠЁжҺ§еҲ¶зҗҶи®әе’ҢжҠҖжңҜеҝ…е°ҶиҝӣдёҖжӯҘеҸ‘жҢҘжӣҙеҠ йҮҚиҰҒзҡ„дҪңз”ЁгҖӮдҪңдёәдёҖдёӘе·ҘзЁӢжҠҖжңҜдәәе‘ҳпјҢдәҶи§Је’ҢжҺҢжҸЎиҮӘеҠЁжҺ§еҲ¶зҡ„жңүе…ізҹҘиҜҶжҳҜеҚҒеҲҶеҝ…иҰҒзҡ„гҖӮ
иҮӘеҠЁжҺ§еҲ¶жҠҖжңҜзҡ„еә”з”ЁдёҚд»…дҪҝз”ҹдә§иҝҮзЁӢе®һзҺ°дәҶиҮӘеҠЁеҢ–пјҢжһҒеӨ§ең°жҸҗй«ҳдәҶеҠіеҠЁз”ҹдә§зҺҮпјҢиҖҢдё”еҮҸиҪ»дәҶдәәзҡ„еҠіеҠЁејәеәҰгҖӮиҮӘеҠЁжҺ§еҲ¶дҪҝе·ҘдҪңе…·жңүй«ҳеәҰзҡ„еҮҶзЎ®жҖ§пјҢеӨ§еӨ§ең°жҸҗй«ҳдәҶжӯҰеҷЁзҡ„е‘ҪдёӯзҺҮе’ҢжҲҳж–—еҠӣпјҢдҫӢеҰӮзҒ«зӮ®иҮӘеҠЁи·ҹиёӘзі»з»ҹеҝ…йЎ»йҮҮз”Ёи®Ўз®—жңәжҺ§еҲ¶жүҚиғҪжү“дёӢй«ҳйҖҹй«ҳз©әйЈһиЎҢзҡ„йЈһжңәгҖӮжҹҗдәӣдәә们дёҚиғҪзӣҙжҺҘеҸӮдёҺе·ҘдҪңзҡ„еңәеҗҲе°ұжӣҙзҰ»дёҚејҖиҮӘеҠЁжҺ§еҲ¶жҠҖжңҜдәҶпјҢдҫӢеҰӮеҺҹеӯҗиғҪзҡ„з”ҹдә§гҖҒзҒ«зӮ®жҲ–еҜјеј№зҡ„еҲ¶еҜјзӯүзӯүгҖӮеҲ©з”ЁMATLABиҪҜ件дёӯзҡ„SIMULINKд»ҝзңҹе·Ҙе…·жқҘе®һзҺ°еҜ№иҮӘеҠЁжҺ§еҲ¶зі»з»ҹе»әжЁЎгҖҒеҲҶжһҗдёҺи®ҫи®ЎгҖҒд»ҝзңҹгҖӮиғҪеӨҹзӣҙи§ӮгҖҒеҝ«йҖҹең°еҲҶжһҗзі»з»ҹзҡ„еҠЁжҖҒжҖ§иғҪгҖҒе’ҢзЁіжҖҒжҖ§иғҪгҖӮ并且иғҪеӨҹзҒөжҙ»зҡ„ж”№еҸҳзі»з»ҹзҡ„з»“жһ„е’ҢеҸӮж•°пјҢйҖҡиҝҮеҝ«йҖҹгҖҒзӣҙи§Ӯзҡ„д»ҝзңҹиҫҫеҲ°зі»з»ҹзҡ„дјҳеҢ–и®ҫи®ЎгҖӮ
1.2 еӣҪеҶ…еӨ–зӣёе…із ”究жғ…еҶө
йҡҸзқҖзӨҫдјҡз”ҹдә§еҠӣзҡ„дёҚж–ӯеҸ‘еұ•е’Ңдәә们з”ҹжҙ»иҙЁйҮҸзҡ„дёҚж–ӯжҸҗй«ҳпјҢеҝ…е°ҶеҜ№жҺ§еҲ¶зҗҶи®әгҖҒжҠҖжңҜгҖҒзі»з»ҹдёҺеә”з”ЁжҸҗеҮәи¶ҠжқҘи¶ҠеӨҡгҖҒи¶ҠжқҘи¶Ҡй«ҳзҡ„иҰҒжұӮпјҢеӣ жӯӨжңүеҝ…иҰҒиҝӣдёҖжӯҘеҠ ејәгҖҒеҠ ж·ұеҜ№иҝҷж–№йқўзҡ„з ”з©¶гҖӮMATLAB/SimulinkдёәжӯӨжҸҗдҫӣдәҶеҸҜиғҪпјҢе®һи·өе·ІиЎЁжҳҺе®ғзҡ„зЎ®жҳҜдёҖдёӘеҠҹиғҪејәеӨ§гҖҒеҪўиұЎйҖјзңҹгҖҒдҫҝдәҺж“ҚдҪңзҡ„иҪҜ件е·Ҙе…·гҖӮеңЁеӣҪеӨ–MATLABе·Із»Ҹз»ҸеҸ—дәҶеӨҡе№ҙиҖғйӘҢгҖӮеңЁж¬§зҫҺй«ҳж ЎпјҢMATLABе·Із»ҸжҲҗдёәиҮӘеҠЁжҺ§еҲ¶дёҺеҗ„зұ»й«ҳзә§иҜҫзЁӢзҡ„еҹәжң¬ж•ҷеӯҰе·Ҙе…·пјҢжҲҗдёәеҗ„й«ҳж ЎеӨ§еӯҰз”ҹгҖҒз ”з©¶з”ҹеҝ…йЎ»жҺҢжҸЎзҡ„еҹәзЎҖзҹҘиҜҶдёҺеҹәжң¬жҠҖиғҪгҖӮ
2 иҮӘеҠЁжҺ§еҲ¶жҰӮиҝ°
2.1 иҮӘеҠЁжҺ§еҲ¶жҰӮеҝө
еңЁзҺ°д»Јз§‘еӯҰжҠҖжңҜзҡ„и®ёеӨҡйўҶеҹҹдёӯпјҢиҮӘеҠЁжҺ§еҲ¶жҠҖжңҜеҫ—еҲ°дәҶе№ҝжіӣзҡ„еә”з”ЁпјҢиҮӘеҠЁжҺ§еҲ¶жҠҖжңҜжңҖжҳҫи‘—зҡ„зү№еҫҒе°ұжҳҜйҖҡиҝҮеҜ№еҗ„зұ»жңәеҷЁпјҢеҗ„з§Қзү©зҗҶеҸӮйҮҸгҖҒе·Ҙдёҡз”ҹдә§иҝҮзЁӢзӯүзҡ„жҺ§еҲ¶зӣҙжҺҘйҖ зҰҸдәҺзӨҫдјҡгҖӮ
жүҖи°“иҮӘеҠЁжҺ§еҲ¶пјҢе°ұжҳҜжҢҮеңЁж— дәәзӣҙжҺҘеҸӮдёҺзҡ„жғ…еҶөдёӢпјҢеҲ©з”ЁжҺ§еҲ¶иЈ…зҪ®ж“ҚзәөеҸ—жҺ§еҜ№иұЎпјҢдҪҝеҸ—жҺ§еҜ№иұЎзҡ„иў«жҺ§йҮҸзӯүдәҺз»ҷе®ҡеҖјжҲ–жҢүз»ҷе®ҡдҝЎеҸ·еҸҳеҢ–规еҫӢеҺ»еҸҳеҢ–гҖӮ
дёәиҫҫеҲ°жҹҗдёҖзӣ®зҡ„пјҢз”ұзӣёдә’еҲ¶зәҰзҡ„еҗ„дёӘйғЁеҲҶпјҢжҢүдёҖе®ҡзҡ„规еҫӢз»„з»ҮжҲҗзҡ„пјҢе…·жңүдёҖе®ҡеҠҹиғҪзҡ„ж•ҙдҪ“пјҢз§°дёәзі»з»ҹпјҢе®ғдёҖиҲ¬з”ұжҺ§еҲ¶иЈ…зҪ®пјҲжҺ§еҲ¶еҷЁпјүе’Ңиў«жҺ§еҜ№иұЎжүҖз»„жҲҗгҖӮ
иҮӘеҠЁжҺ§еҲ¶жңүдёӨз§ҚжңҖеҹәжң¬зҡ„еҪўејҸпјҢеҚіејҖзҺҜжҺ§еҲ¶е’Ңй—ӯзҺҜжҺ§еҲ¶гҖӮ
пјҲ1пјүејҖзҺҜжҺ§еҲ¶
жҺ§еҲ¶иЈ…зҪ®дёҺеҸ—жҺ§еҜ№иұЎд№Ӣй—ҙеҸӘжңүйЎәеҗ‘дҪңз”ЁиҖҢж— еҸҚеҗ‘иҒ”зі»ж—¶пјҢз§°дёәејҖзҺҜжҺ§еҲ¶гҖӮе…¶зү№зӮ№жҳҜпјҡзі»з»ҹз»“жһ„е’ҢжҺ§еҲ¶иҝҮзЁӢеқҮеҫҲз®ҖеҚ•гҖӮејҖзҺҜжҺ§еҲ¶зҡ„зӨәж„ҸжЎҶеӣҫеҰӮеӣҫ2.1жүҖзӨә
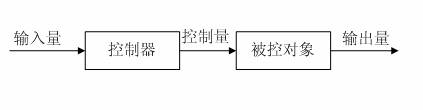
еӣҫ2.1ејҖзҺҜжҺ§еҲ¶зі»з»ҹ
ејҖзҺҜжҺ§еҲ¶жҳҜдёҖз§Қз®ҖеҚ•зҡ„ж— еҸҚйҰҲжҺ§еҲ¶ж–№ејҸпјҢеңЁејҖзҺҜжҺ§еҲ¶зі»з»ҹдёӯеҸӘеӯҳеңЁжҺ§еҲ¶еҷЁеҜ№иў«жҺ§йҮҸеҜ№иұЎзҡ„еҚ•ж–№еҗ‘жҺ§еҲ¶дҪңз”ЁпјҢдёҚеӯҳеңЁиў«жҺ§еҲ¶йҮҸ(иҫ“еҮәйҮҸ)еҜ№иў«жҺ§йҮҸзҡ„еҸҚеҗ‘дҪңз”ЁпјҢзі»з»ҹзҡ„зІҫеәҰеҸ–еҶідәҺз»„жҲҗзі»з»ҹзҡ„е…ғеҷЁд»¶зҡ„зІҫеәҰе’Ңзү№жҖ§и°ғж•ҙзҡ„зІҫзЎ®еәҰгҖӮејҖзҺҜзі»з»ҹеҜ№еӨ–жү°еҸҠеҶ…йғЁеҸӮйҮҸеҸҳеҢ–зҡ„еҪұе“Қзјәд№ҸжҠ‘еҲ¶иғҪеҠӣпјҢдҪҶејҖзҺҜзі»з»ҹеҶ…жһ„з®ҖеҚ•пјҢжҜ”иҫғе®№жҳ“и®ҫи®Ўе’Ңи°ғж•ҙпјҢеҸҜз”ЁдәҺиҫ“еҮәйҮҸдёҺиҫ“е…ҘйҮҸе…ізі»дёәе·ІзҹҘпјҢеҶ…еӨ–жү°еҠЁеҜ№зі»з»ҹеҪұе“ҚдёҚеӨ§пјҢ并且жҺ§еҲ¶зІҫеәҰиҰҒжұӮдёҚй«ҳзҡ„еңәеҗҲгҖӮ
еңЁејҖзҺҜжҺ§еҲ¶зі»з»ҹдёӯпјҢеҜ№дәҺжҜҸдёҖдёӘиҫ“е…ҘеҸӮиҖғйҮҸпјҢе°ұжңүдёҖдёӘдёҺд№ӢзӣёеҜ№еә”зҡ„е·ҘдҪңзҠ¶жҖҒе’Ңиҫ“еҮәйҮҸпјҢзі»з»ҹзҡ„зІҫеәҰеҸ–еҶідәҺе…ғгҖҒеҷЁд»¶зҡ„зІҫеәҰе’Ңзү№жҖ§и°ғж•ҙзҡ„зІҫеәҰпјҢеҪ“зі»з»ҹзҡ„еҶ…жү°е’ҢеӨ–жү°еҪұе“ҚдёҚеӨ§е№¶дё”жҺ§еҲ¶зІҫеәҰиҰҒжұӮдёҚй«ҳж—¶пјҢеҸҜйҮҮз”ЁејҖзҺҜжҺ§еҲ¶ж–№ејҸгҖӮ
пјҲ2пјүй—ӯзҺҜжҺ§еҲ¶
жҺ§еҲ¶иЈ…зҪ®дёҺеҸ—жҺ§еҜ№иұЎд№Ӣй—ҙпјҢдёҚдҪҶжңүйЎәеҗ‘дҪңз”ЁпјҢиҖҢдё”иҝҳжңүеҸҚеҗ‘иҒ”зі»пјҢеҚіжңүиў«жҺ§йҮҸеҜ№жҺ§еҲ¶иҝҮзЁӢзҡ„еҪұе“ҚгҖӮ
й—ӯзҺҜжҺ§еҲ¶зҡ„зү№зӮ№жҳҜпјҡеңЁжҺ§еҲ¶еҷЁе’Ңиў«жҺ§еҜ№иұЎд№Ӣй—ҙпјҢдёҚд»…еӯҳеңЁзқҖжӯЈеҗ‘дҪңз”ЁпјҢиҖҢдё”еӯҳеңЁеҸҚйҰҲдҪңз”ЁпјҢеҚізі»з»ҹзҡ„иҫ“еҮәйҮҸеҜ№жҺ§еҲ¶йҮҸжңүзӣҙжҺҘеҪұе“ҚпјҢе°ҶжЈҖжөӢеҮәжқҘзҡ„иҫ“еҮәйҮҸйҖҒеӣһеҲ°зі»з»ҹзҡ„иҫ“е…Ҙз«ҜпјҢ并дёҺдҝЎеҸ·жҜ”иҫғзҡ„иҝҮзЁӢз§°дёәеҸҚйҰҲпјҢиӢҘеҸҚйҰҲдҝЎеҸ·дёҺиҫ“е…ҘдҝЎеҸ·зӣёеҮҸпјҢеҲҷз§°иҙҹеҸҚйҰҲгҖӮеҸҚд№ӢпјҢиӢҘзӣёеҠ пјҢеҲҷз§°жӯЈеҸҚйҰҲпјҢиҫ“е…ҘдҝЎеҸ·дёҺеҸҚйҰҲдҝЎеҸ·д№Ӣе·®з§°дёәеҒҸе·®дҝЎеҸ·пјҢеҒҸе·®дҝЎеҸ·дҪңз”ЁдәҺжҺ§еҲ¶еҷЁдёҠпјҢжҺ§еҲ¶еҷЁеҜ№еҒҸе·®дҝЎеҸ·иҝӣиЎҢжҹҗз§Қиҝҗз®—пјҢдә§з”ҹдёҖдёӘжҺ§еҲ¶дҪңз”ЁпјҢдҪҝзі»з»ҹзҡ„иҫ“еҮәйҮҸи¶Ӣеҗ‘дәҺз»ҷе®ҡж•°еҖјпјҢй—ӯзҺҜзҡ„е®һиҙЁе°ұжҳҜеҲ©з”ЁиҙҹеҸҚйҰҲзҡ„дҪңз”ЁжқҘеҮҸе°Ҹзі»з»ҹзҡ„иҜҜе·®пјҢеӣ жӯӨй—ӯзҺҜжҺ§еҲ¶еҸҲз§°дёәеҸҚйҰҲжҺ§еҲ¶,е…¶зӨәж„ҸеӣҫеҰӮеӣҫ2.2жүҖзӨәгҖӮ
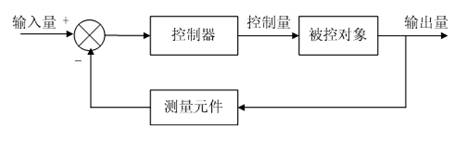
еӣҫ2.2 й—ӯзҺҜжҺ§еҲ¶зі»з»ҹ
еҸҚйҰҲжҺ§еҲ¶жҳҜдёҖз§Қеҹәжң¬зҡ„жҺ§еҲ¶и§„еҫӢпјҢе®ғе…·жңүиҮӘеҠЁдҝ®жӯЈиў«жҺ§йҮҸеҒҸзҰ»з»ҷе®ҡеҖјзҡ„дҪңз”ЁпјҢдҪҝзі»з»ҹеӣ иҖҢеҸҜд»ҘжҠ‘еҲ¶еҶ…жү°е’ҢеӨ–жү°жүҖеј•иө·зҡ„иҜҜе·®пјҢиҫҫеҲ°иҮӘеҠЁжҺ§еҲ¶зҡ„зӣ®зҡ„гҖӮ
й—ӯзҺҜжҺ§еҲ¶жҳҜдёҖз§ҚеҸҚйҰҲжҺ§еҲ¶пјҢеңЁжҺ§еҲ¶иҝҮзЁӢдёӯеҜ№иў«жҺ§йҮҸ(иҫ“еҮәйҮҸ)дёҚж–ӯжөӢйҮҸпјҢ并е°Ҷе…¶еҸҚйҰҲеҲ°иҫ“е…Ҙз«ҜдёҺз»ҷе®ҡеҖј(еҸӮиҖғиҫ“е…ҘйҮҸ)жҜ”иҫғгҖӮеҲ©з”Ёж”ҫеӨ§еҗҺзҡ„еҒҸе·®дҝЎеҸ·дә§з”ҹжҺ§еҲ¶дҪңз”ЁгҖӮеӣ жӯӨпјҢжңүеҸҜиғҪйғЁеҲҶйҮҮз”ЁзӣёеҜ№жқҘиҜҙзІҫеәҰдёҚй«ҳпјҢжҲҗжң¬иҫғеә•зҡ„е…ғеҷЁд»¶з»„жҲҗжҺ§еҲ¶зІҫеәҰиҫғй«ҳзҡ„й—ӯзҺҜжҺ§еҲ¶зі»з»ҹпјҢй—ӯзҺҜжҺ§еҲ¶зі»з»ҹзІҫеәҰеңЁеҫҲеӨ§зЁӢеәҰдёҠз”ұеҪўжҲҗеҸҚйҰҲзҡ„жөӢйҮҸе…ғеҷЁд»¶зҡ„зІҫеәҰеҶіе®ҡгҖӮеңЁжӯӨпјҢй—ӯзҺҜзі»з»ҹе…·жңүејҖзҺҜзі»з»ҹж— еҸҜжҜ”жӢҹзҡ„дјҳзӮ№пјҢж•…еә”з”ЁжһҒе№ҝпјҢдҪҶдёҺжӯӨеҗҢж—¶пјҢеҸҚйҰҲзҡ„еј•е…ҘдҪҝжң¬жқҘзЁіе®ҡиҝҗиЎҢзҡ„ејҖзҺҜзі»з»ҹеҸҜиғҪеҮәзҺ°ејәзғҲзҡ„жҢҜиҚЎпјҢз”ҡиҮідёҚзЁіе®ҡпјҢиҝҷжҳҜйҮҮз”ЁеҸҚйҰҲжҺ§еҲ¶жһ„жҲҗзҡ„й—ӯзҺҜжҺ§еҲ¶ж—¶йңҖиҰҒжіЁж„Ҹи§ЈеҶізҡ„й—®йўҳгҖӮ
2.2 иҮӘеҠЁжҺ§еҲ¶зі»з»ҹзҡ„еҲҶзұ»
ж №жҚ®дёҚеҗҢзҡ„еҲҶзұ»ж–№жі•пјҢиҮӘеҠЁжҺ§еҲ¶зі»з»ҹзҡ„зұ»еһӢеҸҜжҰӮжӢ¬еҰӮдёӢпјҡ
пјҲ1пјүжҒ’еҖјзі»з»ҹгҖҒйҡҸеҠЁзі»з»ҹе’ҢзЁӢеәҸжҺ§еҲ¶зі»з»ҹ
иӢҘзі»з»ҹзҡ„з»ҷе®ҡеҖјжҳҜдёҖе®ҡеҖјпјҢиҖҢжҺ§еҲ¶д»»еҠЎе°ұжҳҜе…ӢжңҚжү°еҠЁпјҢдҪҝиў«жҺ§йҮҸдҝқжҢҒжҒ’еҖјгҖӮжӯӨзұ»зі»з»ҹз§°дёәжҒ’еҖјзі»з»ҹгҖӮ
иӢҘзі»з»ҹз»ҷе®ҡеҖјжҢүз…§дәӢе…ҲдёҚзҹҘйҒ“зҡ„ж—¶й—ҙеҮҪж•°еҸҳеҢ–пјҢ并иҰҒжұӮиў«жҺ§йҮҸи·ҹйҡҸз»ҷе®ҡеҖјеҸҳеҢ–пјҢеҲҷжӯӨзұ»зі»з»ҹз§°дёәйҡҸеҠЁзі»з»ҹгҖӮ
иӢҘзі»з»ҹзҡ„з»ҷе®ҡеҖјжҢүз…§дёҖе®ҡзҡ„ж—¶й—ҙеҮҪж•°еҸҳеҢ–пјҢ并иҰҒжұӮиў«жҺ§йҮҸйҡҸд№ӢеҸҳеҢ–пјҢеҲҷжӯӨзұ»зі»з»ҹз§°дёәзЁӢеәҸжҺ§еҲ¶зі»з»ҹ
пјҲ2пјүйҡҸжңәзі»з»ҹдёҺиҮӘеҠЁи°ғж•ҙзі»з»ҹ
йҡҸжңәзі»з»ҹеҸҲз§°дјәжңҚзі»з»ҹжҲ–и·ҹиёӘзі»з»ҹгҖӮе…¶зү№зӮ№жҳҜеңЁиҫ“е…ҘйҮҸжҖ»жҳҜеңЁйў‘з№Ғең°жҲ–зј“ж…ўең°еҸҳеҢ–пјҢиҰҒжұӮзі»з»ҹзҡ„иҫ“еҮәйҮҸиғҪеӨҹд»ҘдёҖе®ҡзҡ„еҮҶзЎ®еәҰи·ҹйҡҸиҫ“е…ҘйҮҸиҖҢеҸҳеҢ–гҖӮ
иҮӘеҠЁи°ғж•ҙзі»з»ҹеҸҲз§°жҒ’еҖји°ғиҠӮзі»з»ҹпјҲжҲ–и°ғиҠӮеҷЁзі»з»ҹпјүе…¶зү№зӮ№жҳҜиҫ“е…ҘдҝқжҢҒдёәеёёйҮҸпјҢжҲ–ж•ҙе®ҡеҗҺзӣёеҜ№дҝқжҢҒеёёйҮҸпјҢиҖҢзі»з»ҹзҡ„д»»еҠЎжҳҜе°ҪйҮҸжҺ’йҷӨжү°еҠЁзҡ„еҪұе“ҚпјҢд»ҘдёҖе®ҡеҮҶзЎ®еәҰе°Ҷиҫ“еҮәйҮҸдҝқжҢҒеңЁеёҢжңӣзҡ„ж•°еҖјдёҠгҖӮ
пјҲ3пјүзәҝжҖ§зі»з»ҹе’ҢйқһзәҝжҖ§зі»з»ҹ
з»„жҲҗзі»з»ҹзҡ„е…ғгҖҒеҷЁд»¶зҡ„зү№жҖ§еқҮдёәзәҝжҖ§пјҲжҲ–еҹәжң¬зәҝжҖ§пјүиғҪеӨҹз”ЁзәҝжҖ§еёёеҫ®еҲҶж–№зЁӢжҸҸиҝ°е…¶иҫ“е…ҘдёҺиҫ“еҮәзҡ„е…ізі»з§°дёәзәҝжҖ§зі»з»ҹпјҢдё»иҰҒзү№зӮ№жҳҜе…·жңүйҪҗж¬ЎжҖ§е’ҢеҸ еҠ жҖ§пјҢзі»з»ҹж—¶й—ҙе“Қеә”зҡ„зү№еҫҒдёҺеҲқе§ӢзҠ¶жҖҒж— е…ігҖӮ
еңЁз»„жҲҗзі»з»ҹзҡ„е…ғгҖҒеҷЁд»¶дёӯеҸӘиҰҒжңүдёҖдёӘе…ғгҖҒеҷЁд»¶зҡ„зү№жҖ§дёҚиғҪз”ЁзәҝжҖ§ж–№зЁӢжҸҸиҝ°пјҢеҚідёәйқһзәҝжҖ§зі»з»ҹпјҢжҸҸиҝ°йқһзәҝжҖ§зі»з»ҹзҡ„еёёеҫ®еҲҶж–№зЁӢдёӯпјҢиҫ“еҮәйҮҸеҸҠеҗ„йҳ¶еҜјж•°дёҚе®Ңе…ЁжҳҜдёҖж¬Ўзҡ„пјҢжҲ–иҖ…жңүзҡ„иҫ“еҮәйҮҸеҜјж•°йЎ№зҡ„зі»ж•°жҳҜиҫ“е…ҘйҮҸзҡ„еҮҪж•°пјҢзі»з»ҹзҡ„ж—¶й—ҙе“Қеә”зү№жҖ§дёҺиў«еҲқе§ӢзҠ¶жҖҒжңүжһҒеӨ§зҡ„е…ізі»гҖӮ
пјҲ4пјүиҝһз»ӯзі»з»ҹдёҺзҰ»ж•Јзі»з»ҹ
иҝһз»ӯзі»з»ҹеҗ„йғЁеҲҶзҡ„иҫ“е…Ҙе’Ңиҫ“еҮәдҝЎеҸ·йғҪжҳҜиҝһз»ӯеҮҪж•°зҡ„жЁЎжӢҹйҮҸгҖӮ
зҰ»ж•Јзі»з»ҹжҳҜжҢҮжҹҗдёҖеӨ„жҲ–иҖ…ж•°еӨ„зҡ„дҝЎеҸ·д»Ҙи„үеҶІжҲ–ж•°з Ғзҡ„еҪўејҸдј йҖ’зҡ„зі»з»ҹгҖӮ
дёҖиҲ¬иҜҙжқҘпјҢеҗҢж ·жҳҜеҸҚйҰҲжҺ§еҲ¶зі»з»ҹпјҢдҪҶж•°еӯ—жҺ§еҲ¶зІҫеәҰпјҲе°Өе…¶жҳҜжҺ§еҲ¶зҡ„зЁіжҖҒеҮҶзЎ®еәҰпјүй«ҳдәҺзҰ»ж•ЈжҺ§еҲ¶гҖӮеӣ дёәж•°з ҒеҪўејҸзҡ„жҺ§еҲ¶дҝЎеҸ·иҝңжҜ”жЁЎжӢҹжҺ§еҲ¶дҝЎеҸ·зҡ„жҠ—е№Іжү°иғҪеҠӣејәгҖӮ
жҸҸиҝ°иҝһз»ӯжҺ§еҲ¶зі»з»ҹз”Ёеҫ®еҲҶж–№зЁӢпјҢиҖҢжҸҸиҝ°зҰ»ж•ЈжҺ§еҲ¶зі»з»ҹеҲҷз”Ёе·®еҲҶж–№зЁӢгҖӮ
2.3 еҜ№жҺ§еҲ¶зі»з»ҹзҡ„жҖ§иғҪиҰҒжұӮ
еңЁжҺ§еҲ¶иҝҮзЁӢдёӯпјҢдёҖдёӘзҗҶжғізҡ„жҺ§еҲ¶зі»з»ҹпјҢе§Ӣз»Ҳеә”дҪҝе…¶иў«жҺ§йҮҸпјҲиҫ“еҮәпјүзӯүдәҺз»ҷе®ҡеҖјпјҲиҫ“е…ҘпјүгҖӮ
дҪҶжҳҜз”ұдәҺжңәжў°йғЁеҲҶиҙЁйҮҸгҖҒжғҜйҮҸзҡ„еӯҳеңЁпјҢз”өи·ҜдёӯеӯҳеӮЁе…ғ件зҡ„еӯҳеңЁд»ҘеҸҠиғҪжәҗеҠҹзҺҮзҡ„йҷҗеҲ¶пјҢдҪҝеҫ—иҝҗеҠЁйғЁд»¶зҡ„еҠ йҖҹеәҰеҸ—еҲ°йҷҗеҲ¶пјҢе…¶йҖҹеәҰе’ҢдҪҚзҪ®йҡҫд»Ҙзһ¬ж—¶еҸҳеҢ–гҖӮжүҖд»ҘеҪ“з»ҷе®ҡеҖјеҸҳеҢ–ж—¶пјҢиў«жҺ§йҮҸдёҚеҸҜиғҪз«ӢеҚізӯүдәҺз»ҷе®ҡеҖјпјҢиҖҢйңҖиҰҒдёҖдёӘиҝҮеәҰиҝҮзЁӢпјҢеҚіеҠЁжҖҒиҝҮзЁӢпјҢжүҖи°“еҠЁжҖҒиҝҮзЁӢе°ұжҳҜжҢҮзі»з»ҹеҸ—еҲ°еӨ–еҠ дҝЎеҸ·пјҲз»ҷе®ҡеҖјжҲ–жү°еҠЁпјүдҪңз”ЁеҗҺпјҢиў«жҺ§йҮҸйҡҸж—¶й—ҙеҸҳеҢ–зҡ„е…ЁиҝҮзЁӢгҖӮ
еӣ жӯӨеҜ№зі»з»ҹжҖ§иғҪзҡ„еҹәжң¬иҰҒжұӮжңүдёүдёӘж–№йқўгҖӮ
зЁіе®ҡжҖ§пјҡзЁіе®ҡжҖ§жҳҜиҝҷж ·жқҘиЎЁиҝ°зҡ„пјҡзі»з»ҹеҸ—еҲ°еӨ–дҪңз”ЁеҗҺпјҢе…¶еҠЁжҖҒиҝҮзЁӢзҡ„жҢҜиҚЎеҖҫеҗ‘е’Ңзі»з»ҹжҒўеӨҚжҒўеӨҚе№іиЎЎзҡ„иғҪеҠӣгҖӮеҰӮжһңзі»з»ҹеҸ—еӨ–еҠӣдҪңз”ЁеҗҺпјҢз»ҸиҝҮдёҖж®өж—¶й—ҙпјҢе…¶иў«жҺ§йҮҸеҸҜд»ҘиҫҫеҲ°жҹҗдёҖзЁіе®ҡзҠ¶жҖҒпјҢеҲҷз§°зі»з»ҹжҳҜзЁіе®ҡзҡ„пјҢеҗҰеҲҷз§°дёәдёҚзЁіе®ҡзі»з»ҹгҖӮ
еҝ«йҖҹжҖ§пјҡеҝ«йҖҹжҖ§жҳҜйҖҡиҝҮеҠЁжҖҒиҝҮзЁӢж—¶й—ҙй•ҝзҹӯжқҘиЎЁеҫҒзҡ„пјҢиҝҮжёЎиҝҮзЁӢж—¶й—ҙи¶ҠзҹӯпјҢиЎЁжҳҺеҝ«йҖҹжҖ§и¶ҠеҘҪпјҢеҸҚд№ӢдәҰ然гҖӮеҝ«йҖҹжҖ§иЎЁжҳҺдәҶзі»з»ҹиҫ“еҮәеҜ№иҫ“е…Ҙе“Қеә”зҡ„еҝ«ж…ўзЁӢеәҰгҖӮзі»з»ҹе“Қеә”и¶Ҡеҝ«пјҢиҜҙжҳҺзі»з»ҹзҡ„иҫ“еҮәеӨҚзҺ°иҫ“е…ҘдҝЎеҸ·зҡ„иғҪеҠӣи¶ҠејәгҖӮ
еҮҶзЎ®жҖ§пјҡеҮҶзЎ®жҖ§жҳҜз”ұиҫ“е…Ҙз»ҷе®ҡеҖјдёҺиҫ“еҮәе“Қеә”зҡ„е§Ӣз»ҲеҖјд№Ӣй—ҙзҡ„е·®еҖјжқҘиЎЁеҫҒзҡ„гҖӮе®ғеҸҚжҳ дәҶзі»з»ҹзҡ„зЁіжҖҒзІҫеәҰгҖӮиӢҘзі»з»ҹзҡ„жңҖз»ҲиҜҜе·®дёәйӣ¶пјҢеҲҷз§°дёәж— е·®зі»з»ҹпјҢеҗҰеҲҷз§°дёәжңүе·®зі»з»ҹгҖӮ
зЁіе®ҡжҖ§гҖҒеҝ«йҖҹжҖ§е’ҢеҮҶзЎ®жҖ§еҫҖеҫҖжҳҜдә’зӣёеҲ¶зәҰзҡ„гҖӮеңЁи®ҫи®ЎдёҺи°ғиҜ•иҝҮзЁӢдёӯпјҢиӢҘиҝҮеҲҶејәи°ғзі»з»ҹзҡ„зЁіе®ҡжҖ§пјҢеҲҷеҸҜиғҪдјҡйҖ жҲҗзі»з»ҹе“Қеә”иҝҹзј“е’ҢжҺ§еҲ¶зІҫеәҰиҫғдҪҺзҡ„еҗҺжһңпјҡеҸҚд№ӢпјҢиӢҘиҝҮеҲҶејәи°ғзі»з»ҹе“Қеә”зҡ„еҝ«йҖҹжҖ§пјҢеҲҷеҸҲдјҡдҪҝзі»з»ҹзҡ„жҢҜиҚЎеҠ еү§пјҢз”ҡиҮіеј•иө·дёҚзЁіе®ҡгҖӮ
еңЁеҲҶжһҗе’Ңи®ҫи®ЎиҮӘеҠЁжҺ§еҲ¶зі»з»ҹж—¶пјҢеә”иҜҘе°ҪйҮҸдҪҝе…¶еҜ№дёүж–№йқўзҡ„жҖ§иғҪжңүжүҖдҫ§йҮҚпјҢ并兼йЎҫе…¶д»–пјҢд»Ҙе…Ёйқўж»Ўи¶іиҰҒжұӮгҖӮ
2.4 е…ёеһӢзҺҜиҠӮ
дёҖдёӘзү©зҗҶзі»з»ҹжҳҜз”ұи®ёеӨҡе…ғ件组еҗҲиҖҢжҲҗзҡ„пјҢиҷҪ然еҗ„з§Қе…ғ件зҡ„е…·дҪ“з»“жһ„е’ҢдҪңз”ЁеҺҹзҗҶжҳҜеӨҡз§ҚеӨҡж ·зҡ„пјҢдҪҶиӢҘжҠӣејҖе…·дҪ“з»“жһ„е’Ңзү©зҗҶзү№зӮ№пјҢз ”з©¶е…¶иҝҗеҠЁи§„еҫӢе’Ңж•°еӯҰжЁЎеһӢзҡ„е…ұжҖ§пјҢе°ұеҸҜд»ҘеҲ’еҲҶдёәж•°дёҚеӨҹзҡ„еҮ з§Қе…ёеһӢзҺҜиҠӮпјҲе…ёеһӢзҺҜиҠӮеҸӘд»ЈиЎЁдёҖз§Қзү№е®ҡзҡ„иҝҗеҠЁи§„еҫӢпјҢдёҚдёҖе®ҡжҳҜдёҖз§Қе…·дҪ“зҡ„е…ғ件пјүгҖӮ
пјҲ1пјүжҜ”дҫӢзҺҜиҠӮ
жҜ”дҫӢзҺҜиҠӮзҡ„еҫ®еҲҶж–№зЁӢдёә
 пјҲ2-1пјү
пјҲ2-1пјү
ејҸдёӯпјҢ дёәж”ҫеӨ§еҖҚж•°гҖӮ
дёәж”ҫеӨ§еҖҚж•°гҖӮ
жҜ”дҫӢзҺҜиҠӮзҡ„дј йҖ’еҮҪж•°дёә
пјҲ2-2пјү
еӣҫ2.3 жҜ”дҫӢзҺҜиҠӮж–№жЎҶеӣҫ
жҜ”дҫӢзҺҜиҠӮзҡ„зү№зӮ№жҳҜпјҢе…¶иҫ“еҮәдёҚеӨұзңҹпјҢдёҚ延иҝҹпјҢжҲҗжҜ”дҫӢең°еӨҚзҺ°иҫ“е…ҘдҝЎеҸ·зҡ„еҸҳеҢ–пјҢеҚідҝЎеҸ·зҡ„дј йҖ’жІЎжңүжғҜжҖ§гҖӮ
пјҲ2пјүз§ҜеҲҶзҺҜиҠӮ
 з§ҜеҲҶзҺҜиҠӮзҡ„еҫ®еҲҶж–№зЁӢдёәпјҡ
з§ҜеҲҶзҺҜиҠӮзҡ„еҫ®еҲҶж–№зЁӢдёәпјҡ
пјҲ2-3пјү
е…¶дёӯTдёәз§ҜеҲҶж—¶й—ҙеёёж•°
 з§ҜеҲҶзҺҜиҠӮзҡ„дј йҖ’еҮҪж•°дёәпјҡ
з§ҜеҲҶзҺҜиҠӮзҡ„дј йҖ’еҮҪж•°дёәпјҡ
пјҲ2-4пјү
е…¶дёӯз§ҜеҲҶзҺҜиҠӮзҡ„ж–№жЎҶеӣҫеҰӮеӣҫ2.4жүҖзӨә
еӣҫ2.4 з§ҜеҲҶзҺҜиҠӮж–№жЎҶеӣҫ
з§ҜеҲҶзҺҜиҠӮзҡ„зү№зӮ№жҳҜпјҢиҫ“еҮәйҮҸдёҺиҫ“е…ҘйҮҸеҜ№ж—¶й—ҙзҡ„з§ҜеҲҶжҲҗжӯЈжҜ”гҖӮиӢҘиҫ“е…ҘзӘҒеҸҳпјҢиҫ“еҮәеҖјиҰҒзӯүж—¶й—ҙTд№ӢеҗҺжүҚзӯүдәҺиҫ“е…ҘеҖјпјҢж•…жңүж»һеҗҺдҪңз”ЁгҖӮиҫ“еҮәз§ҜзҙҜдёҖж®өж—¶й—ҙеҗҺпјҢеҚідҪҝдҪҝиҫ“е…Ҙдёәйӣ¶пјҢиҫ“еҮәд№ҹе°ҶдҝқжҢҒеҺҹеҖјдёҚеҸҳпјҢеҚіе…·жңүи®°еҝҶеҠҹиғҪгҖӮеҸӘжңүеҪ“иҫ“е…ҘеҸҚеҗ‘ж—¶пјҢиҫ“еҮәжүҚеҸҚеҗ‘з§ҜеҲҶиҖҢдёӢйҷҚгҖӮеёёеҲ©з”Ёз§ҜеҲҶзҺҜиҠӮжқҘж”№е–„зі»з»ҹзҡ„зЁіжҖҒжҖ§иғҪгҖӮ
пјҲ3пјүеҫ®еҲҶзҺҜиҠӮ
 зҗҶжғізҡ„еҫ®еҲҶзҺҜиҠӮзҡ„еҫ®еҲҶж–№зЁӢдёә
зҗҶжғізҡ„еҫ®еҲҶзҺҜиҠӮзҡ„еҫ®еҲҶж–№зЁӢдёә
пјҲ2-5пјү
е…¶дёӯTдёәеҫ®еҲҶж—¶й—ҙеёёж•°гҖӮ
 еҜ№еҫ®еҲҶж–№зЁӢеҸ–жӢүж°ҸеҸҳжҚўеҗҺпјҢеҸҜжұӮеҫ—дј йҖ’еҮҪж•°
еҜ№еҫ®еҲҶж–№зЁӢеҸ–жӢүж°ҸеҸҳжҚўеҗҺпјҢеҸҜжұӮеҫ—дј йҖ’еҮҪж•°
пјҲ2-6пјү
зҗҶжғізҡ„еҫ®еҲҶзҺҜиҠӮзҡ„ж–№жЎҶеӣҫеҰӮеӣҫ2.5жүҖзӨә
еӣҫ2.5 еҫ®еҲҶзҺҜиҠӮж–№жЎҶеӣҫ
 иӢҘиҫ“е…ҘдёәеҚ•дҪҚйҳ¶и·ғдҝЎеҸ·пјҢеҚі
иӢҘиҫ“е…ҘдёәеҚ•дҪҚйҳ¶и·ғдҝЎеҸ·пјҢеҚі пјҢеҲҷиҫ“еҮәзҡ„еҚ•дҪҚйҳ¶и·ғе“Қеә”дёә
пјҢеҲҷиҫ“еҮәзҡ„еҚ•дҪҚйҳ¶и·ғе“Қеә”дёә
пјҲ2-7пјү
иҝҷжҳҜдёҖдёӘйқўз§Ҝдёәτзҡ„и„үеҶІпјҢи„үеҶІе®Ҫдёәйӣ¶пјҢе№…еҖјдёәж— з©·еӨ§пјҢзҗҶжғіеҫ®еҲҶзҺҜиҠӮзҡ„иҫ“е…Ҙе’Ңиҫ“еҮәеҰӮеӣҫ2.6жүҖзӨәгҖӮ
еӣҫ2.6зҗҶжғіеҫ®еҲҶзҺҜиҠӮзҡ„еҚ•дҪҚйҳ¶и·ғе“Қеә”
еҫ®еҲҶзҺҜиҠӮзҡ„зү№зӮ№жҳҜпјҢе…¶иҫ“еҮәдёҺиҫ“е…ҘдҝЎеҸ·еҜ№ж—¶й—ҙзҡ„еҫ®еҲҶжҲҗжӯЈжҜ”пјҢеҚіиҫ“еҮәеҸҚжҳ дәҶиҫ“е…ҘдҝЎеҸ·зҡ„еҸҳеҢ–зҺҮпјҢиҖҢдёҚеҸҚжҳ иҫ“е…ҘйҮҸжң¬иә«зҡ„еӨ§е°ҸгҖӮеӣ жӯӨпјҢеҸҜз”ұеҫ®еҲҶзҺҜиҠӮзҡ„иҫ“еҮәжқҘеҸҚжҳ иҫ“е…ҘдҝЎеҸ·зҡ„еҸҳеҢ–и¶ӢеҠҝпјҢеҠ йҖҹзі»з»ҹжҺ§еҲ¶дҪңз”Ёзҡ„е®һзҺ°гҖӮеёёеҲ©з”Ёеҫ®еҲҶзҺҜиҠӮжқҘж”№е–„зі»з»ҹзҡ„еҠЁжҖҒжҖ§иғҪгҖӮ
пјҲ4пјүжғҜжҖ§зҺҜиҠӮ
жғҜжҖ§зҺҜиҠӮзҡ„еҫ®еҲҶж–№зЁӢдёә
 пјҲ2-8пјү
пјҲ2-8пјү
ејҸдёӯTдёәж—¶й—ҙеёёж•°пјҢKдёәжҜ”дҫӢзі»ж•°гҖӮ
жғҜжҖ§зҺҜиҠӮзҡ„дј йҖ’еҮҪж•°дёә
 пјҲ2-9пјү
пјҲ2-9пјү
дёҠејҸз§°дёәжғҜжҖ§зҺҜиҠӮзҡ„ж ҮеҮҶејҸгҖӮеҪ“ ж—¶пјҢ
ж—¶пјҢ
еңЁеҚ•дҪҚйҳ¶и·ғдҝЎеҸ·дҪңз”ЁдёӢзҡ„зӣёеә”дёә
 пјҲ2-10пјү
пјҲ2-10пјү
еӣҫ2.7дёәK=1ж—¶пјҢжғҜжҖ§зҺҜиҠӮзҡ„ж–№жЎҶеӣҫгҖӮ
еӣҫ2.7 жғҜжҖ§зҺҜиҠӮж–№жЎҶеӣҫ
жғҜжҖ§зҺҜиҠӮзҡ„зү№зӮ№жҳҜпјҢе…¶иҫ“еҮәйҮҸдёҚиғҪзһ¬ж—¶е®ҢжҲҗдёҺиҫ“еҮәйҮҸе®Ңе…ЁдёҖиҮҙзҡ„еҸҳеҢ–гҖӮ
пјҲ5пјүж—¶ж»һзҺҜиҠӮ
ж—¶ж»һзҺҜиҠӮд№ҹ称延иҝҹзҺҜиҠӮпјҢе…¶ж•°еӯҰиЎЁиҫҫејҸдёә
 пјҲ2-11пјү
пјҲ2-11пјү
ејҸдёӯτдёә延иҝҹж—¶й—ҙгҖӮ
з”ұжӯӨпјҢеҸҜеҫ—дј йҖ’еҮҪж•°
 пјҲ2-12пјү
пјҲ2-12пјү
ж—¶ж»һзҺҜиҠӮзҡ„ж–№жЎҶеӣҫеҰӮеӣҫ2.8гҖӮ
еӣҫ2.8 ж—¶ж»һзҺҜиҠӮж–№жЎҶеӣҫ
ж—¶ж»һзҺҜиҠӮзҡ„зү№зӮ№жҳҜпјҢе…¶иҫ“еҮәжіўеҪўдёҺиҫ“е…ҘжіўеҪўзӣёеҗҢпјҢдҪҶ延иҝҹдәҶж—¶й—ҙгҖӮж—¶ж»һзҺҜиҠӮзҡ„еӯҳеңЁеҜ№зі»з»ҹеҫ—зЁіе®ҡжҖ§дёҚеҲ©гҖӮзі»з»ҹзҡ„е…ёеһӢзҺҜиҠӮжҳҜжҢүж•°еӯҰжЁЎеһӢзҡ„е…ұжҖ§еҺ»е»әз«Ӣзҡ„пјҢдёҺзі»з»ҹдёӯйҮҮз”Ёзҡ„е…ғ件дёҚжҳҜдёҖдёҖеҜ№еә”зҡ„гҖӮеҲҶжһҗжҲ–и®ҫи®Ўзі»з»ҹеҝ…е…Ҳе»әз«Ӣзі»з»ҹжҲ–иў«жҺ§еҜ№иұЎзҡ„ж•°еӯҰжЁЎеһӢпјҢе°Ҷе…¶дёҺе…ёеһӢзҺҜиҠӮзҡ„ж•°еӯҰжЁЎеһӢеҜ№жҜ”еҗҺпјҢеҚіеҸҜзҹҘе…¶з”ұд»Җд№Ҳж ·зҡ„е…ёеһӢзҺҜиҠӮз»„жҲҗгҖӮ
е…ёеһӢзҺҜиҠӮзҡ„жҰӮеҝөеҸӘйҖӮз”ЁдәҺиғҪеӨҹз”ЁзәҝжҖ§е®ҡеёёж•°еӯҰжЁЎеһӢжҸҸиҝ°зҡ„зі»з»ҹпјҢиҖҢдё”зұ»еһӢзҺҜиҠӮж•°еӯҰжЁЎеһӢжҳҜеңЁдёҖзі»еҲ—зҗҶжғіжқЎд»¶йҷҗеҲ¶дёӢе»әз«Ӣзҡ„гҖӮ
3 MATLABд»ҝзңҹиҪҜ件зҡ„еә”з”Ё
MTALABзі»з»ҹз”ұдә”дёӘдё»иҰҒйғЁеҲҶз»„жҲҗпјҢдёӢйқўеҲҶеҲ«еҠ д»Ҙд»Ӣз»ҚгҖӮ
пјҲ1пјүMATALBиҜӯиЁҖдҪ“зі»
MATLABжҳҜй«ҳеұӮж¬Ўзҡ„зҹ©йҳөпјҸж•°з»„иҜӯиЁҖпјҺе…·жңүжқЎд»¶жҺ§еҲ¶гҖҒеҮҪж•°и°ғз”ЁгҖҒж•°жҚ®з»“жһ„гҖҒиҫ“е…Ҙиҫ“еҮәгҖҒйқўеҗ‘еҜ№иұЎзӯүзЁӢеәҸиҜӯиЁҖзү№жҖ§гҖӮеҲ©з”Ёе®ғж—ўеҸҜд»ҘиҝӣиЎҢе°Ҹ规模编зЁӢпјҢе®ҢжҲҗз®—жі•и®ҫи®Ўе’Ңз®—жі•е®һйӘҢзҡ„еҹәжң¬д»»еҠЎпјҢд№ҹеҸҜд»ҘиҝӣиЎҢеӨ§и§„жЁЎзј–зЁӢпјҢејҖеҸ‘еӨҚжқӮзҡ„еә”з”ЁзЁӢеәҸгҖӮ
пјҲ2пјүMATLABе·ҘдҪңзҺҜеўғ
иҝҷжҳҜеҜ№MATLABжҸҗдҫӣз»ҷз”ЁжҲ·дҪҝз”Ёзҡ„з®ЎзҗҶеҠҹиғҪзҡ„жҖ»з§°пјҺеҢ…жӢ¬з®ЎзҗҶе·ҘдҪңз©әй—ҙдёӯзҡ„еҸҳйҮҸжҚ®иҫ“е…Ҙиҫ“еҮәзҡ„ж–№ејҸе’Ңж–№жі•пјҢд»ҘеҸҠејҖеҸ‘гҖҒи°ғиҜ•гҖҒз®ЎзҗҶMж–Ү件зҡ„еҗ„з§Қе·Ҙе…·гҖӮ
пјҲ3пјүеӣҫеҪўеӣҫеғҸзі»з»ҹ
иҝҷжҳҜMATLABеӣҫеҪўзі»з»ҹзҡ„еҹәзЎҖпјҢеҢ…жӢ¬е®ҢжҲҗ2Dе’Ң3Dж•°жҚ®еӣҫзӨәгҖҒеӣҫеғҸеӨ„зҗҶгҖҒеҠЁз”»з”ҹжҲҗгҖҒеӣҫеҪўжҳҫзӨәзӯүеҠҹиғҪзҡ„й«ҳеұӮMATLABе‘Ҫд»ӨпјҢд№ҹеҢ…жӢ¬з”ЁжҲ·еҜ№еӣҫеҪўеӣҫеғҸзӯүеҜ№иұЎиҝӣиЎҢзү№жҖ§жҺ§еҲ¶зҡ„дҪҺеұӮMATLABе‘Ҫд»ӨпјҢд»ҘеҸҠејҖеҸ‘GUIеә”з”ЁзЁӢеәҸзҡ„еҗ„з§Қе·Ҙе…·гҖӮ
пјҲ4пјүMATLABж•°еӯҰеҮҪж•°еә“
иҝҷжҳҜеҜ№MATLABдҪҝз”Ёзҡ„еҗ„з§Қж•°еӯҰз®—жі•зҡ„жҖ»з§°пјҺеҢ…жӢ¬еҗ„з§ҚеҲқзӯүеҮҪж•°зҡ„з®—жі•пјҢд№ҹеҢ…жӢ¬зҹ©йҳөиҝҗз®—гҖҒзҹ©йҳөеҲҶжһҗзӯүй«ҳеұӮж¬Ўж•°еӯҰз®—жі•гҖӮ
пјҲ5пјүMATLABеә”з”ЁзЁӢеәҸжҺҘеҸЈ
иҝҷжҳҜMATLABдёәз”ЁжҲ·жҸҗдҫӣзҡ„дёҖдёӘеҮҪж•°еә“пјҢдҪҝеҫ—з”ЁжҲ·иғҪеӨҹеңЁMATLABзҺҜеўғдёӯдҪҝз”ЁcзЁӢеәҸжҲ–FORTRANзЁӢеәҸпјҢеҢ…жӢ¬д»ҺMATLABдёӯи°ғз”ЁдәҺзЁӢеәҸ(еҠЁжҖҒй“ҫжҺҘ)пјҢиҜ»еҶҷMATж–Ү件зҡ„еҠҹиғҪгҖӮ еҸҜд»ҘзңӢеҮәMATLABжҳҜдёҖдёӘеҠҹиғҪеҚҒеҲҶејәеӨ§зҡ„зі»з»ҹпјҢжҳҜйӣҶж•°еҖји®Ўз®—гҖҒеӣҫеҪўз®ЎзҗҶгҖҒзЁӢеәҸејҖеҸ‘дёәдёҖдҪ“зҡ„зҺҜеўғгҖӮйҷӨжӯӨд№ӢеӨ–пјҢMATLABиҝҳе…·жңүж №ејәзҡ„еҠҹиғҪжү©еұ•иғҪеҠӣпјҢдёҺе®ғзҡ„дё»зі»з»ҹдёҖиө·пјҢеҸҜд»Ҙй…ҚеӨҮеҗ„з§Қеҗ„ж ·зҡ„е·Ҙе…·з®ұпјҢд»Ҙе®ҢжҲҗдёҖдәӣзү№е®ҡзҡ„д»»еҠЎгҖӮ
MATLABзҡ„SIMULINKеӯҗеә“жҳҜдёҖдёӘе»әжЁЎгҖҒеҲҶжһҗеҗ„з§Қзү©зҗҶе’Ңж•°еӯҰзі»з»ҹзҡ„иҪҜ件гҖӮз”ұдәҺеңЁWINDOWSз•ҢйқўдёӢе·ҘдҪң,жүҖд»ҘеҜ№жҺ§еҲ¶зі»з»ҹзҡ„ж–№еқ—еӣҫзј–иҫ‘гҖҒз»ҳеҲ¶еҫҲж–№дҫҝгҖӮ
MATLABе‘Ҫд»ӨзӘ—еҸЈеҗҜеҠЁSIMULINKзЁӢеәҸеҗҺ,еҮәзҺ°зҡ„з•ҢйқўеҰӮдёӢгҖӮ
еҲҶеҲ«дёәдҝЎеҸ·жәҗгҖҒиҫ“еҮәгҖҒзҰ»ж•Јзі»з»ҹеә“гҖҒзәҝжҖ§зі»з»ҹеә“гҖҒйқһзәҝжҖ§зі»з»ҹеә“гҖҒзі»з»ҹиҝһжҺҘеҸҠжү©еұ•зі»з»ҹгҖӮдёӢйқўеҲҶеҲ«д»Ӣз»Қ:
пјҲ1пјүдҝЎеҸ·жәҗ
зЁӢеәҸжҸҗдҫӣдәҶе…«з§ҚдҝЎеҸ·жәҗ,еҲҶеҲ«дёәйҳ¶и·ғдҝЎеҸ·гҖҒжӯЈејҰжіўдҝЎеҸ·гҖҒзҷҪеҷӘеЈ°гҖҒж—¶й’ҹгҖҒеёёеҖјдҝЎеҸ·гҖҒж–Ү件гҖҒдҝЎеҸ·еҸ‘з”ҹеҷЁзӯүеҸҜзӣҙжҺҘдҪҝз”ЁгҖӮиҖҢдҝЎеҸ·еҸ‘з”ҹеҷЁ(singal gein)еҸҜдә§з”ҹжӯЈејҰжіўгҖҒж–№жіўгҖҒй”ҜйҪҝжіўгҖҒйҡҸжңәдҝЎеҸ·зӯүгҖӮ
пјҲ2пјүдҝЎеҸ·иҫ“еҮә
зЁӢеәҸжҸҗдҫӣдәҶдёүз§Қиҫ“еҮәж–№ејҸ,еҸҜе°Ҷд»ҝзңҹз»“жһңйҖҡиҝҮдёүз§Қж–№ејҸд№ӢдёҖеҰӮд»ҝзңҹзӘ—еҸЈгҖҒж–Ү件зӯүеҪўејҸиҫ“еҮәгҖӮ
пјҲ3пјүзҰ»ж•Јзі»з»ҹ
зЁӢеәҸжҸҗдҫӣдәҶдә”з§Қж ҮеҮҶжЁЎејҸ,延иҝҹгҖҒйӣ¶-жһҒзӮ№гҖҒж»ӨжіўеҷЁгҖҒдј йҖ’еҮҪж•°гҖҒзҠ¶жҖҒз©әй—ҙзӯүгҖӮ并且жҜҸз§Қж ҮеҮҶжЁЎејҸйғҪеҸҜж–№дҫҝең°ж”№еҸҳеҸӮж•°д»Ҙз¬ҰеҗҲиў«д»ҝзңҹзі»з»ҹгҖӮ
пјҲ4пјү<
д»ҝзңҹе®һйӘҢ  收и—Ҹи‘©жҳҹ
收и—Ҹи‘©жҳҹ





 400-878-1895
400-878-1895