еҹәдәҺSimulinkзҡ„жұҪиҪҰABSе»әжЁЎдёҺд»ҝзңҹ
жұҪиҪҰйҳІжҠұжӯ»еҲ¶еҠЁзі»з»ҹ(ABS)жҳҜдёҖз§ҚеҫҲе…ій”®зҡ„жұҪиҪҰдё»еҠЁе®үе…ЁжҠҖжңҜгҖӮжң¬ж–ҮйҮҮз”ЁеҹәдәҺжңүйҷҗзҠ¶жҖҒжңәзҡ„зі»з»ҹд»ҝзңҹж–№жі•пјҢйҮҮз”ЁSimulinkе»әжЁЎпјҢеҜ№ABSжЁЎеһӢдёӯзҡ„иҝһз»ӯзі»з»ҹе’ҢзҰ»ж•Јзі»з»ҹиҝӣиЎҢд»ҝзңҹгҖӮд»ҝзңҹз»“жһңиЎЁжҳҺпјҢиҜҘд»ҝзңҹзі»з»ҹиғҪжҜ”иҫғзңҹе®һең°еҸҚжҳ жұҪиҪҰABSзі»з»ҹзҡ„е®һйҷ…е·ҘдҪңиҝҮзЁӢпјҢжҳҫи‘—зј©зҹӯеҲ¶еҠЁи·қзҰ»пјҢжҸҗй«ҳе®үе…ЁжҖ§гҖӮ
йҖҡиҝҮеҜ№ABSе»әз«ӢзҗҶи®әжЁЎеһӢ并иҝӣиЎҢи®Ўз®—жңәд»ҝзңҹпјҢеҸҜд»ҘеҲқжӯҘзЎ®е®ҡABSзҡ„дёҖдәӣеҸӮж•°пјҢиҝҳеҸҜд»ҘйҖҡиҝҮд»ҝзңҹз»“жһңжқҘйӘҢиҜҒе’ҢеҲҶжһҗжҺ§еҲ¶йҖ»иҫ‘гҖӮеӣ жӯӨпјҢеҜ№ABSзҡ„д»ҝзңҹеҲҶжһҗеҸҜд»Ҙжңүж•Ҳзј©зҹӯејҖеҸ‘е‘ЁжңҹпјҢеҮҸе°‘ејҖеҸ‘жҲҗжң¬пјҢ并йҖҡиҝҮе°‘йҮҸзҡ„иҜ•йӘҢйӘҢиҜҒпјҢеҸҜдҪңдёәе®һйҷ…ABSжҖ§иғҪеҲҶжһҗеҸҠжҺ§еҲ¶йҖ»иҫ‘зҡ„жЁЎеһӢгҖӮ
1гҖҒABSд»ҝзңҹжЁЎеһӢе»әз«Ӣзҡ„зҗҶи®әдҫқжҚ®
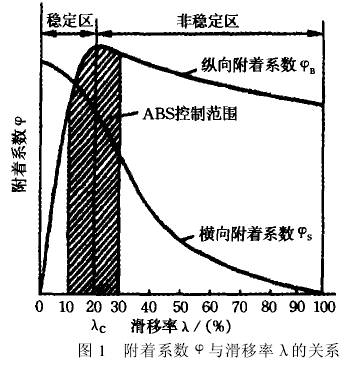
жұҪиҪҰеҲ¶еҠЁж—¶зҡ„йҷ„зқҖзі»ж•°дёҺ滑移зҺҮзҡ„е…ізі»жӣІзәҝеҰӮеӣҫ1жүҖзӨәпјҢдёәиҺ·еҫ—жңҖдҪізҡ„еҲ¶еҠЁж•ҲиғҪпјҢеә”е°ҶиҪҰиҪ®ж»‘移зҺҮжҺ§еҲ¶еңЁ10%-30% зҡ„иҢғеӣҙеҶ…пјҢеҪ“滑移зҺҮдёә2O%ж—¶пјҢе…¶зәөеҗ‘йҷ„зқҖзі»ж•°иҫҫеҲ°еі°еҖјпјҢеҲ¶еҠЁж•ҲжһңжңҖеҘҪгҖӮеӣ жӯӨпјҢйҖҡеёёжҠҠ2O%зҡ„滑移зҺҮз§°дёәзҗҶжғіж»‘移зҺҮжҲ–жңҖдҪіж»‘移зҺҮгҖӮжң¬и®ҫи®Ўзҡ„д»ҝзңҹзі»з»ҹеҸ–滑移зҺҮжҺ§еҲ¶иҢғеӣҙдёә18%--22%гҖӮ
жң¬ж–Үд»ҝзңҹзі»з»ҹзҡ„е»әз«ӢеҹәдәҺеҚ•иҪҰиҪ®жЁЎеһӢпјҢеҚ•иҪҰиҪ®зҡ„еҸ—еҠӣеҲ¶еҠЁиҝҮзЁӢжЁЎеһӢеҰӮеӣҫ2жүҖзӨәпјҢ
 (1)
(1)
 (2)
(2)
йҖҡеёёиҪҰиҪ®еҲ¶еҠЁжүӯзҹ©дёҺиҪ®зјёеҺӢеҠӣжҲҗжӯЈжҜ”пјҢеҚіпјҡ
 (3)
(3)
 (4)
(4)
еӣ жӯӨ еҸҜеҫ—иҪҰиҪ®ж»‘移зҺҮпјҡ  (5)
(5)
ејҸдёӯM--иҪҰиҪ®жүҝеҸ—зҡ„иҙЁйҮҸпјӣV--иҪҰиә«йҖҹеәҰпјӣ --иҪҰиҪ®йҖҹеәҰпјӣ
--иҪҰиҪ®йҖҹеәҰпјӣ вҖ”ең°йқўеҲ¶еҠЁеҠӣпјӣJвҖ”иҪҰиҪ®иҪ¬еҠЁжғҜйҮҸпјӣ
вҖ”ең°йқўеҲ¶еҠЁеҠӣпјӣJвҖ”иҪҰиҪ®иҪ¬еҠЁжғҜйҮҸпјӣ --иҪҰиҪ®и§’йҖҹеәҰпјӣR--иҪҰиҪ®ж»ҡеҠЁеҚҠеҫ„пјӣ
--иҪҰиҪ®и§’йҖҹеәҰпјӣR--иҪҰиҪ®ж»ҡеҠЁеҚҠеҫ„пјӣ --еҲ¶еҠЁеҷЁжүӯзҹ©пјӣK--еҲ¶еҠЁеҠӣзҹ©зі»ж•°пјӣP--иҪ®зјёеҺӢеҠӣпјӣ
--еҲ¶еҠЁеҷЁжүӯзҹ©пјӣK--еҲ¶еҠЁеҠӣзҹ©зі»ж•°пјӣP--иҪ®зјёеҺӢеҠӣпјӣ  вҖ”滑移зҺҮгҖӮ
вҖ”滑移зҺҮгҖӮ

жң¬д»ҝзңҹзі»з»ҹйҮҮз”Ёзҡ„жұҪиҪҰжЁЎеһӢеҸӮж•°еҰӮиЎЁ1жүҖзӨәпјҡ
иЎЁдёҖ жұҪиҪҰжЁЎеһӢеҸӮж•°
|
еҗҚз§°дёҺз¬ҰеҸ· |
ж•°еҖј |
|
еҚ•иҪҰиҪ®жүҝеҸ—иҙЁйҮҸMпјҲKgпјү
еҲ¶еҠЁеҠӣзҹ©зі»ж•°K
еҲ¶еҠЁеҲқйҖҹеәҰ (Km/h) (Km/h)
иҪҰиҪ®ж»ҡеҠЁеҚҠеҫ„R(m) |
460
21
25
0.26 |
|
иҪҰиҪ®иҪ¬еҠЁжғҜйҮҸJ |
5 |
2гҖҒABSд»ҝзңҹжЁЎеһӢзҡ„е»әз«ӢеҸҠеҸӮж•°и®ҫзҪ®
ABSзі»з»ҹд»ҝзңҹжЁЎеһӢеҰӮеӣҫ3жүҖзӨә:
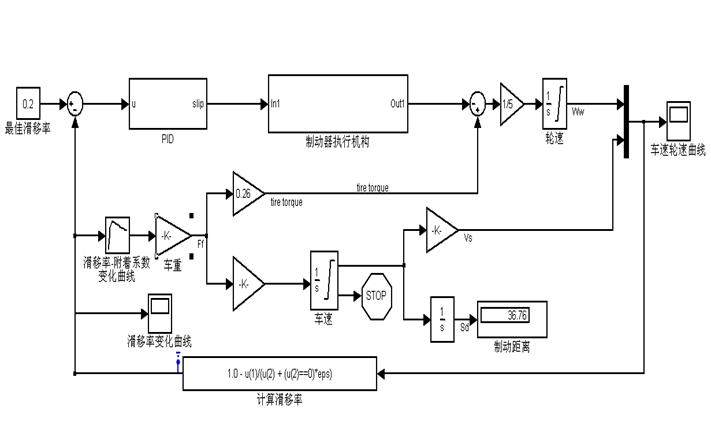
еӣҫ3 ABSзі»з»ҹд»ҝзңҹжЁЎеһӢ
3гҖҒABSзі»з»ҹд»ҝзңҹз»“жһң
еҜ№еҲқйҖҹеәҰдёә25Km/hзҡ„жұҪиҪҰABSзі»з»ҹиҝӣиЎҢи®Ўз®—жңәд»ҝзңҹпјҢд»ҝзңҹз»“жһңеҰӮеӣҫ4е’Ңеӣҫ5жүҖзӨәгҖӮиЎЁжҳҺдҪҝз”ЁABSиЈ…з”ЁиҜҘз§ҚжҺ§еҲ¶йҖ»иҫ‘зҡ„жұҪиҪҰеҲ¶еҠЁи·қзҰ»иҫғе°ҸпјҢ滑移зҺҮеҹәжң¬жҺ§еҲ¶еңЁ0.2йҷ„иҝ‘пјҢдё”еҲ¶еҠЁйҷ„зқҖзі»ж•°еҹәжң¬еңЁеі°еҖјйҷ„зқҖзі»ж•°зӮ№е°ҸиҢғеӣҙзҡ„жіўеҠЁпјҢеҲ¶еҠЁжҖ§иғҪиүҜеҘҪгҖӮ
д»ҺдёӢйқўзҡ„еӣҫдёӯеҸҜд»ҘзңӢеҮәпјҢеңЁеҲ¶еҠЁеҲқе§Ӣж—¶пјҢйҡҸзқҖеҲ¶еҠЁеҺӢеҠӣзҡ„еўһеҠ пјҢ滑移зҺҮеўһеҠ пјҢеҪ“еӨ§дәҺ0пјҺ18ж—¶пјҢABSзі»з»ҹдҪҝе…¶жҺ§еҲ¶еңЁ0пјҺ18пҪһOпјҺ22иҢғеӣҙеҶ…пјҢдҪҝзі»з»ҹзЁіе®ҡеҲ¶еҠЁпјҢпјҢдё”еҲ¶еҠЁи·қзҰ»иҫғе°ҸпјҢе®ўи§Ӯең°еҸҚжҳ дәҶжұҪиҪҰзҡ„еҲ¶еҠЁжҖ§иғҪгҖӮиҖҢд»Һд»ҝзңҹз»“жһңжқҘзңӢпјҢиЈ…жңүABSзҡ„жұҪиҪҰзҡ„еҲ¶еҠЁи·қзҰ»д»…дёә37.24mе·ҰеҸіпјҢиҝҷе……еҲҶиҜҙжҳҺдәҶжұҪиҪҰABSзі»з»ҹиғҪеӨ§еӨ§еҮҸе°ҸеҲ¶еҠЁи·қзҰ»пјҢд№ҹиҜҙжҳҺдәҶиҝҷз§ҚеҹәдәҺSimulinkзҡ„жұҪиҪҰйҳІжҠұжӯ»еҲ¶еҠЁзі»з»ҹе»әжЁЎдёҺд»ҝзңҹзҡ„ж–№жі•дёҺжұҪиҪҰзҡ„е®һйҷ…еҲ¶еҠЁзҠ¶еҶөжҳҜеҹәжң¬дёҖиҮҙзҡ„гҖӮ
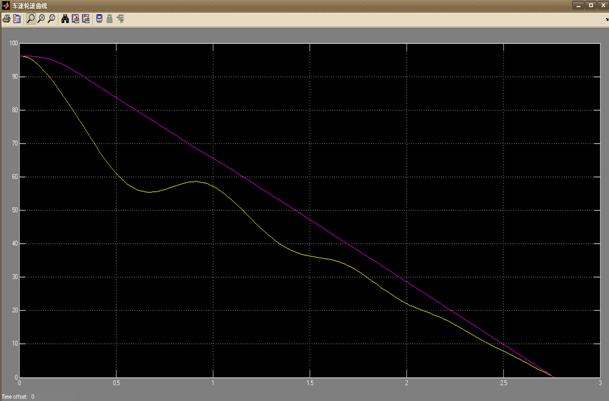
еӣҫ4 иҪҰйҖҹиҪ®йҖҹжӣІзәҝ

еӣҫ5 滑移зҺҮеҸҳеҢ–жӣІзәҝ
4гҖҒз»“жқҹиҜӯ
иҝҷз§ҚдҪҝз”ЁSimulinkд»ҝзңҹж–№жі•пјҢеҸҜд»Ҙжңүж•ҲжЁЎжӢҹжұҪиҪҰABSдҪңз”ЁиҝҮзЁӢпјҢжҜ”иҫғзңҹе®һең°еҸҚжҳ жұҪиҪҰABSзі»з»ҹзҡ„е®һйҷ…е·ҘдҪңжғ…еҶөгҖӮйҖҡиҝҮеҜ№д»ҝзңҹз»“жһңзҡ„еҲҶжһҗпјҢиЎЁжҳҺABSеңЁзј©зҹӯжұҪиҪҰи·қзҰ»дёҠзҡ„жҳҫи‘—еҠҹиғҪпјҢд№ҹиҜҒжҳҺдәҶиҝҷз§Қд»ҝзңҹж–№жі•зҡ„еҗҲзҗҶжҖ§еҸҠе®һз”ЁжҖ§гҖӮ并且д»ҝзңҹзі»з»ҹдёӯзҡ„еҸӮж•°еҸҜд»Ҙж №жҚ®е…·дҪ“иҪҰеһӢзҡ„ж”№еҸҳиҖҢж”№еҸҳпјҢйқһеёёз®ҖеҚ•гҖҒжҳҺдәҶпјҢдҫҝдәҺеҜ№ABSзі»з»ҹзҡ„и®ҫи®Ўд»ҘеҸҠзі»з»ҹеҸӮж•°зҡ„дјҳеҢ–гҖӮ
е…ҚиҙЈеЈ°жҳҺ/зүҲжқғз”іжҳҺ Passiontech
жүҖжңүж–Үз« дёәзҪ‘дёҠжҗңйӣҶжҲ–з§ҒдёӢдәӨжөҒеӯҰд№ д№Ӣз”ЁпјҢд»»дҪ•ж¶үеҸҠе•ҶдёҡзӣҲеҲ©зӣ®зҡ„еқҮдёҚеҫ—дҪҝз”ЁпјҢеҗҰеҲҷдә§з”ҹзҡ„дёҖеҲҮеҗҺжһңз”ұжӮЁиҮӘе·ұжүҝжӢ…!
жң¬з«ҷд»…д»…жҸҗдҫӣдёҖдёӘи§Ӯж‘©еӯҰд№ зҡ„зҺҜеўғпјҢе°ҶдёҚеҜ№д»»дҪ•иө„жәҗиҙҹжі•еҫӢиҙЈд»»гҖӮжүҖжңүиө„жәҗиҜ·еңЁдёӢиҪҪеҗҺ24е°Ҹж—¶еҶ…еҲ йҷӨгҖӮ
иӢҘж— ж„ҸдёӯдҫөзҠҜеҲ°жӮЁзҡ„зүҲжқғеҲ©зӣҠпјҢиҜ·жқҘдҝЎиҒ”зі»жҲ‘们пјҢжҲ‘们дјҡеңЁж”¶еҲ°дҝЎжҒҜдёүеӨ©еҶ…з»ҷдәҲеӨ„зҗҶ!
 收и—Ҹи‘©жҳҹ
收и—Ҹи‘©жҳҹ





 400-878-1895
400-878-1895




