倒立摆以及小车控制系统——四阶、非线性、非稳定实时控制系统
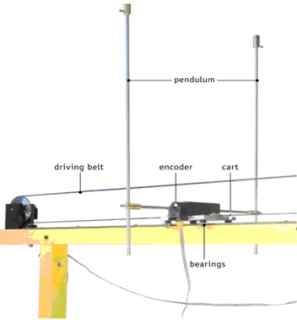
倒立摆及小车控制系统由一个安装在两轴上的杆组成,这样杆就自由的在垂直平面上旋转。转轴由一个直流电机进行驱动。为了摆动和保持杆的平衡,小车必须在一个限定长度的轨道上来回的摆动。
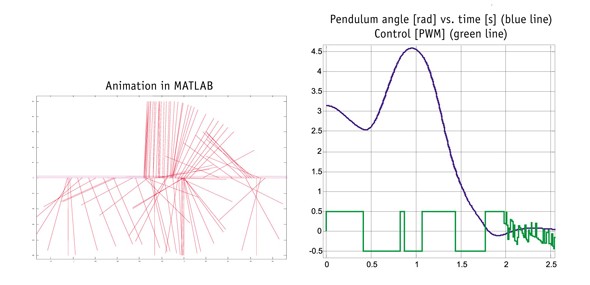
倒立摆控制算法的目的就是应用一些列的不同量级的驱动力在推动小车,使得摆进行运动,并且在轨道范围内不断增大幅度进行控制。杆需要向上晃动到能维持在直立位置附近晃动的状态,一旦这点被实现,控制器就要通过小车的运动来维持这一个状态。
该系统可以直接在Matlab/Simulink环境下运行,用户只要在RTW工具箱中使用已经编程好的实验程序,当然也可以非常方便、快速的使用Simulink模型库和驱动生成一个自己的控制器。

硬件:
钟摆以及小车控制系统
PWM控制的12V直流电机
线性轴承
电源接口
RT-DAC I/O 内置PCI板卡或者外置USB板卡(PWM控制和编码器逻辑储存在XILINX芯片中)
尺寸:
2200*500*700mm
 收藏灵猫网
收藏灵猫网