The data exchange between the numerous control devices, sensors and actuators in automobiles is nowadays mainly carried out via CAN networks. However, the introduction of the new x-by-wire systems results in increased requirements especially with regard to error tolerance and time-determinism of message transmission. FlexRay fulfils these increased requirements by message transmission in fixed time slots and by fault-tolerant and redundant message transmission on two channels.
Access to the FlexRay transmission medium
FlexRay works according to the principle of TDMA (Time Division Multiple Access), where the components or messages have allocated fixed time slots in which they have exclusive access to the bus. The time slots are repeated in a fixed cycle. The time at which a message is on the bus can be exactly predicted and bus access is therefore deterministic.However, the fixed allocation of the bus bandwidth to the FlexRay components or messages by means of fixed time slots has the disadvantage that the bandwidth is not fully exploited. For this reason FlexRay subdivides the cycle into a static and a dynamic segment. The fixed time slots are situated in the static segment at the beginning of a bus cycle. In the dynamic segment the time slots are assigned dynamically. Exclusive bus access is only enabled for a short time in each case (so-called "mini-slots"). The time slot is only extended by the required time if a bus access occurs within a mini-slot. Bandwidth is therefore only used up when it is actually needed.
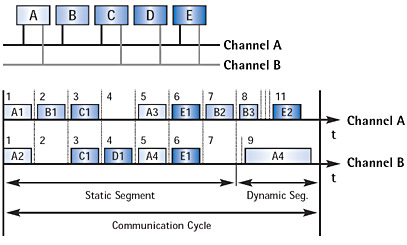
Fig. 1: FlexRay communication cycle
Data rate of FlexRay
FlexRay communicates via two physically separated lines with a data rate of 10 Mbit/s each. The two lines are mainly used for redundant and therefore fault-tolerant message transmission but can also transmit different messages, in which case the data throughput is doubled.FlexRay can also be operated with lower data rates of 2.5 or 5 MBit/s. Bus topologies, active and passive star topologies as well as mixed topologies are defined for data transmission.
Synchronization of nodes
In order to implement synchronous functions and optimize the bandwidth by means of small distances between two FlexRay messages, the distributed components in the communication network require a common time base (global time). For clock synchronization, specific FlexRay messages tagged as synchronization messages are transmitted in the static segment of the cycle. With the aid of a special algorithm, the local clock-time of a component is corrected in such a way that all local clocks run synchronously to a global clock.Structure of a FlexRay network node
A FlexRay network node consists of a host processor, FlexRay communication controller (CC), optional bus guardian (BG) and bus driver (BD). The host processor supplies and processes the data, which is transmitted via the FlexRay controller.The bus driver connects the communication controller to the bus, the bus guardian monitors access to the bus. The host processor informs the bus guardian which time slots the FlexRay controller has allocated. The bus guardian then allows the FlexRay controller transmit access within these time slots. Data can be received at any time.
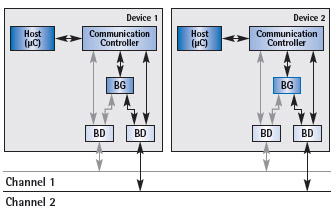
Fig. 2: FlexRay network node