LIN (Local Interconnect Network) is a low-priced serial communication system that was specially developed for cross-linking simple electronic assemblies in automobiles. LIN is particularly useful in areas where simple sensors and actuators are to be networked but where the efficiency of CAN (Controller Area Network) is not required.
Generally the sub-systems connected with LIN (e.g. doors, seats, steering wheel) are connected to higher order CAN-based networks (body, chassis). This provides simple access for CAN-based diagnostic and service tools.
Communication principle
The LIN technology is a serial single wire communication protocol based on the standard SCI interface (UART). Access to the LIN bus is controlled by a master which guarantees a maximum latency time.A special characteristic of LIN is the synchronization of the slave devices via the bus, where implementation is made possible by low-priced nodes with simple resonant circuits. Data communication takes place by means of a 12 V single wire line with a maximum data transmission rate of 20 kBit/s.
Due to the small number of identifiers (64) as well as the relatively low bit rate, a typical LIN system has up to 16 nodes. The clock synchronization, simple UART communication, and the single wire medium all contribute to the low cost of a LIN system.
LIN message format
The transmission of a LIN telegram begins with a 13-bit long dominant level (sync break) transmitted by the master which is used to identify the start of the frame. Then the master transmits a sync field (alternate 1-0 sequences). This can be used by the slave node for clock synchronization.After the sync field, the identifier is transmitted by the master. This consists of a 6-bit long message ID and a 2-bit long parity field. In addition to the ID, the message ID contains an optional message length information (2, 4 or 8 data bytes). The slave, which is addressed by the message ID, now transmits its data bytes (1-8 data bytes) followed by a checksum. The protocol version 1.3 uses the classic checksum whereas protocol version 2.0 uses the enhanced checksum.
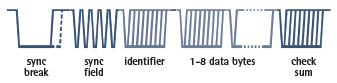
LIN telegram
Event triggered frame
The LIN specification 2.0 defines an event-triggered frame in addition to the standard frame (unconditional frame). For this, several frame IDs are defined as event triggered within the network. If the master device requests such a frame, the corresponding slave starts to transmit data. When this occurs, the slave also transmits a frame ID of a standard frame within the first data byte which is assigned to this information. If a collision occurs or if an event triggered frame can not be identified correctly, the information will then be transmitted individually by using a standard frame.LIN products and services
IXXAT offers products and services for LIN. Our powerful LIN-to-CAN gateway "LIN2CAN" allows the emulation of LIN slave and master/slave devices and can also be used as a PC interface to analyze LIN systems. Since the automotive version of our USB-to-CAN II interface provides both a CAN interface and a LIN interface, it can also be used for the time synchronous analysis of LIN and CAN systems.Capitalizing upon its development experience and applied expertise, IXXAT also offers customized development of hardware and software for LIN and, the implementation of LIN interfaces and protocols in customers' systems.