|
加载中,请稍候...
|
|
自平衡小车_
关键词:
固高科技,教学实训产品
|

|
|
简介:自平衡小车 倒立摆系统是非线性、强耦合、多变量和自然不稳定的系统,是检验各种控制理论的理想模型。在控制过程中倒立摆系统能有效地反映诸如稳定性、鲁棒性、随动性以及跟踪性等许多控制中的关键问题。目前研究的倒立摆... |
|
品 牌
|
RobLab
|

|
|
产 地
|
China
|
|
型 号
|
PXF0447
|
|
折 扣
|
其他电询
|
|
咨询专家:
|
产品说明:
|
|
| |
| 倒立摆系统是非线性、强耦合、多变量和自然不稳定的系统,是检验各种控制理论的理想模型。在控制过程中倒立摆系统能有效地反映诸如稳定性、鲁棒性、随动性以及跟踪性等许多控制中的关键问题。目前研究的倒立摆主要有两种:一种是底端固定的,另一种是底端沿着固定的轨道运动,其中大部分在直线轨道上运行。两轮自平衡小车则是一个底端可以自由移动的三自由度倒立摆系统,增加了控制的难度。安装在小车上的倾角计实时地反馈小车的偏角于控制器,控制器通过先进的控制策略实时计算输出两车轮的力矩来控制小车的平衡。 |
|
|
|
| |
系统特点
1.比台式倒立摆它有更多的运动自由度
2.开放的MATLAB运动控制软件环境
3.嵌入式工业用运动控制器(PC104总线),Windows开发平台
4.在线修改控制算法,实现更多、实时性更好的自定义控制功能
5.更方便地加入附加功能(语音,视觉),扩展性强
6.提供MATLAB控制接口
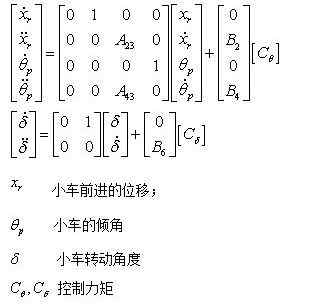
系统模型
参考实验内容
- 陀螺仪原理分析与实验
- 无线遥控原理分析与实验
- 系统建模实验分析
- 系统的开环响应特性分析
- PID控制器设计
- 极点配置控制器设计
- LQR控制器设计
- 用户自定义控制算法
MATLAB控制软件及其界面
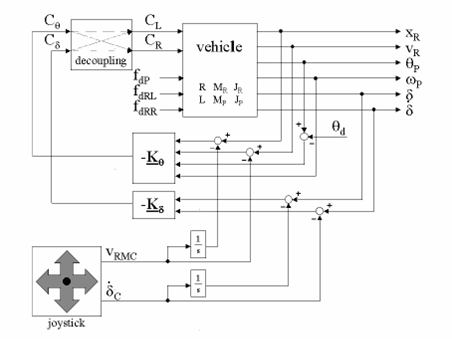
控制方框图
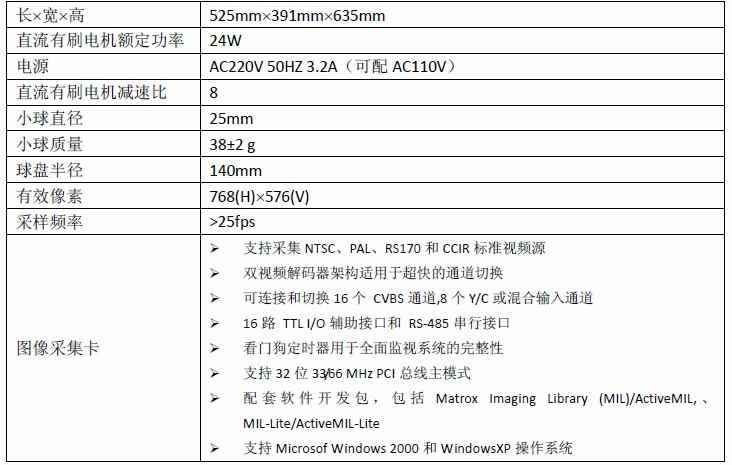
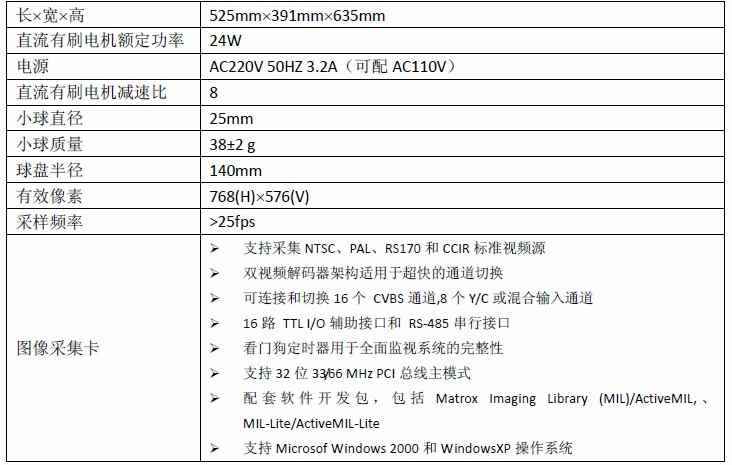
主要技术参数
|
长´宽´高
|
426mm´574mm´710mm
|
|
直流伺服电机功率
|
85W
|
|
电机减速比
|
10:1
|
|
运动控制器
|
基于DSP和FPGA技术的嵌入式运动控制器
PC104总线
3轴电机控制通道
|
|
软件环境
|
MATLAB7.0
|
|
最大移动速度
|
1.6m/s
|
|
电源模块
|
镍氢电池8.5Ah(24V)
|
|
电源持续工作时长
|
>1.5小时
|
|
最大爬坡角度
|
20度
|
|
倾角计(陀螺仪)
|
供电电源 9~12V
AD/DA精度 12bits
工作电流 30mA
检测最大角速度 ±300deg/sec(25˚C)
检测角度量程(单轴) 360˚ (25˚C)
响应频率 150HZ
温度漂移 ± 0.025%/˚C
工作温度范围 -40~50˚C
模拟量输出 (0~4.096V)
重复测量精度 0.10˚
|
|
小车净重
|
20Kg
|
定购指南
|
产品编号
|
产品名称
|
产品配置
|
|
GBOT1001
|
自平衡小车
|
ABOT-MB-1001 自平衡小车本体
ABOT-CS-1001 自平衡小车控制系统
SBOT-MAT-1001 自平衡小车控制系统软件
|
控制器架构
使用对象
综合了控制类课程的主要实验项目,可满足本科,研究生教学实验,课程设计,毕业设计以及算法研究等不同层次的教学需求。
|
倒立摆
参数资料:
|
自平衡小车_固高科技,教学实训产品


|
价格列表:
自平衡小车_固高科技,教学实训产品
| 葩星订货号 |
订货号 |
产品名称 |
报价 |
品牌 |
|
| PXO_0630 | EL4008 | 8-channel analog output terminal 0…10 V, 12 bit, 1-wire system | 1697 | ~ | 2168 | beckhoff |  |  |
|
|
咨询历史:
|
|
 收藏灵猫网
收藏灵猫网