гҖҖгҖҖж‘ҳ иҰҒгҖҖз ”з©¶еҰӮдҪ•еҲ©з”ЁеҸҳз»“жһ„жҺ§еҲ¶зҗҶи®әи®ҫи®Ўж°ёзЈҒеҗҢжӯҘз”өеҠЁжңәзҡ„и°ғйҖҹжҺ§еҲ¶зі»
з»ҹпјҢиҝҷз§ҚжҺ§еҲ¶зі»з»ҹеҹәдәҺеҗҢжӯҘз”өеҠЁжңәзҡ„иҪ¬еӯҗзЈҒй“ҫе®ҡеҗ‘жҺ§еҲ¶зҗҶи®әпјӣи®әж–ҮдёӯиҝҳеҜ№иҜҘзі»з»ҹиҝӣиЎҢж•°еӯҰе»әжЁЎпјҢ并йҖҡиҝҮMATLABпјҸSIMULINKиҝӣиЎҢдәҶд»ҝзңҹе®һйӘҢгҖӮгҖҖгҖҖ
е…ій”®иҜҚгҖҖж°ёзЈҒз”өжңәгҖҖи°ғйҖҹзі»з»ҹгҖҖд»ҝзңҹ
1гҖҖеј•иЁҖ
гҖҖгҖҖж°ёзЈҒеҗҢжӯҘз”өеҠЁжңәиҪ¬еӯҗж—ӢиҪ¬ж—¶иҪ¬еӯҗзЈҒеңәеңЁе®ҡеӯҗз»•з»„дёӯдә§з”ҹжӯЈејҰжіўеҪўзҡ„еҸҚз”өеҠҝпјҢйҮҮз”Ёиҝҷз§Қз”өжңәзҡ„и°ғйҖҹзі»з»ҹдёҖиҲ¬з§°д№ӢдёәжӯЈејҰеһӢж°ёзЈҒеҗҢжӯҘз”өеҠЁжңәпјҲPMSMпјүи°ғйҖҹзі»з»ҹгҖӮPMSMеӨҡйҮҮз”ЁеҸҳйў‘еҷЁдҫӣз”өпјҢ并引е…ҘзҹўйҮҸжҺ§еҲ¶зҗҶи®әеҜ№з”өжңәе®һиЎҢзЈҒеңәе®ҡеҗ‘жҺ§еҲ¶пјҢеӨ§еӨ§ж”№е–„дәҶз”өжңәзҡ„и°ғйҖҹжҖ§иғҪе’ҢиҝҗиЎҢзү№жҖ§гҖӮ
гҖҖгҖҖжң¬ж–ҮиҜҰз»Ҷи®әиҝ°дәҶеҰӮдҪ•дҪҝз”ЁеҸҳз»“жһ„жҺ§еҲ¶зҗҶи®әжқҘи®ҫи®ЎPMSMзҡ„и°ғйҖҹзі»з»ҹгҖӮж–ҮдёӯйҮҮз”Ёзү№е®ҡж–№жі•дёҚж–ӯж”№еҸҳжҺ§еҲ¶зі»з»ҹзҡ„з»“жһ„еҸӮж•°пјҢ并и®ҫи®Ўзі»з»ҹзҡ„жҺ§еҲ¶зҺҮпјҢд»ҺиҖҢдҪҝз”өжңәзҡ„иө·еҠЁгҖҒиҝҗиЎҢгҖҒи°ғйҖҹе’ҢеҲ¶еҠЁиҫҫеҲ°йў„жңҹзҡ„ж•ҲжһңпјҢ并且系з»ҹеҜ№жЁЎеһӢеҸӮж•°е’ҢеӨ–йғЁе№Іжү°е…·жңүеҫҲеҘҪзҡ„йҖӮеә”жҖ§пјҢйІҒжЈ’жҖ§еҫҲеҘҪгҖӮи®әж–ҮжңҖеҗҺиҝҳеҲ©з”ЁMATLABиҪҜ件жҸҗдҫӣзҡ„д»ҝзңҹе·Ҙе…·SIMULINKеҜ№PMSMзҡ„еҸҳз»“жһ„жҺ§еҲ¶зі»з»ҹиҝӣиЎҢдәҶеҸҜйқ зҡ„д»ҝзңҹиҜ•йӘҢгҖӮгҖҖгҖҖ
2гҖҖPMSMи°ғйҖҹзі»з»ҹзҡ„ж•°еӯҰжЁЎеһӢ
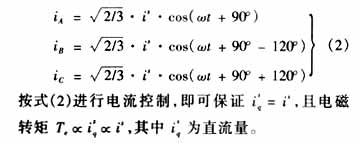
гҖҖгҖҖйҮҮз”ЁиҪ¬еӯҗзЈҒй“ҫе®ҡеҗ‘зҡ„зҹўйҮҸжҺ§еҲ¶пјҲеҚіisdпјқ0пјүж–№жі•еҜ№PMSMи°ғйҖҹж—¶пјҢиҰҒжұӮз”өжңәе®ҡеӯҗдёүзӣёз”өжөҒеҗҲжҲҗзҡ„з©әй—ҙз»јеҗҲзҹўйҮҸisеә”иҜҘдҪҚдәҺqиҪҙдёҠпјҢжӯӨж—¶е®ҡеӯҗз”өжөҒе…ЁйғЁз”ЁжқҘдә§з”ҹиҪ¬зҹ©гҖӮиӢҘд»ӨIпјқisпјҢKTпјқpmΨrпјҢеҲҷз”өзЈҒиҪ¬зҹ©ж–№зЁӢдёә

иҝҷз§ҚжҺ§еҲ¶ж–№ејҸжңҖдёәз®ҖеҚ•пјҢеҸӘйЎ»еҮҶзЎ®жЈҖжөӢеҮәиҪ¬еӯҗз©әй—ҙдҪҚзҪ®пјҲdиҪҙпјүпјҢйҖҡиҝҮжҺ§еҲ¶йҖҶеҸҳеҷЁиҫ“еҮәдҪҝдёүзӣёе®ҡеӯҗз”өжөҒзҡ„еҗҲжҲҗзҹўйҮҸдҪҚдәҺqиҪҙдёҠеҚіеҸҜгҖӮи®ҫз”өжңәиҪ¬еӯҗзҡ„еҲқе§ӢдҪҚзҪ®жҒ°еҘҪдёәdиҪҙдёҺAиҪҙйҮҚеҗҲеӨ„пјҢиҪ¬еӯҗж—ӢиҪ¬еҗҺdиҪҙдёҺAиҪҙеӨ№и§’дёә иҪ¬еӯҗзһ¬ж—¶и§’йҖҹеәҰгҖӮеҲҷеҪ“е®ҡеӯҗдёүзӣёз”өжөҒж»Ўи¶ідёӢеҲ—е…ізі»ж—¶пјҢе…¶еҗҲжҲҗзҹўйҮҸisеҝ…дёҺqиҪҙйҮҚеҗҲ
иҪ¬еӯҗзһ¬ж—¶и§’йҖҹеәҰгҖӮеҲҷеҪ“е®ҡеӯҗдёүзӣёз”өжөҒж»Ўи¶ідёӢеҲ—е…ізі»ж—¶пјҢе…¶еҗҲжҲҗзҹўйҮҸisеҝ…дёҺqиҪҙйҮҚеҗҲ
иҪ¬зҹ©жҺ§еҲ¶жҳҜз”өжңәи°ғйҖҹзҡ„е…ій”®пјҢжӢ–еҠЁжҺ§еҲ¶зі»з»ҹзҡ„еҹәжң¬иҝҗеҠЁж–№зЁӢдёә

еҲҷеҸҜжҺЁеҮәPMSMиҪ¬еӯҗзЈҒй“ҫе®ҡеҗ‘жҺ§еҲ¶зі»з»ҹзҹ©йҳөеҪўејҸзҡ„зҠ¶жҖҒж–№зЁӢеҰӮдёӢ


3гҖҖеҸҳз»“жһ„жҺ§еҲ¶зҗҶи®әеңЁз”өжңәи°ғйҖҹжҺ§еҲ¶дёӯзҡ„еә”з”ЁгҖҖгҖҖ
гҖҖгҖҖи®ҫиҫ“е…ҘRпјҲtпјүдёәдёҖзҗҶжғізҡ„еҸӮиҖғжҢҮд»ӨпјҢиЎЁзӨәз”өжңәиө·еҠЁгҖҒзЁіе®ҡиҝҗиЎҢжҲ–еҲ¶еҠЁж—¶зҡ„жҖ§иғҪиҰҒжұӮпјҢеёҢжңӣиҫ“еҮәYпјҲtпјүиғҪеҫҲеҘҪең°и·ҹиёӘжҢҮд»ӨRпјҲtпјүеҸҳеҢ–пјҢи®ҫи·ҹиёӘиҜҜе·®еҗ‘йҮҸдёәEпјҲtпјүпјҢеҲҷ
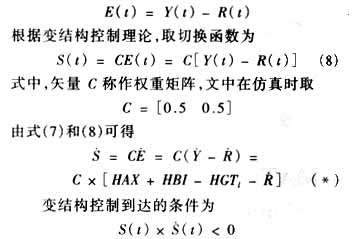

еӣ жӯӨз”ұејҸпјҲ8пјүз®—еҮәзҡ„SпјҲtпјүз¬ҰеҸ·еҸҜзҹҘ з¬ҰеҸ·пјҢз»“еҗҲејҸпјҲпјҠпјүеҚіеҸҜеҫ—еҮәжҺ§еҲ¶еҸҳйҮҸIзҡ„еҸ–еҖјиҢғеӣҙгҖӮ
з¬ҰеҸ·пјҢз»“еҗҲејҸпјҲпјҠпјүеҚіеҸҜеҫ—еҮәжҺ§еҲ¶еҸҳйҮҸIзҡ„еҸ–еҖјиҢғеӣҙгҖӮ
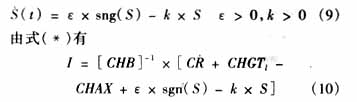
гҖҖгҖҖдёәж¶ҲйҷӨзі»з»ҹжғҜжҖ§еёҰжқҘзҡ„жҠ–еҠЁй—®йўҳгҖӮдёӢйқўжҲ‘们е°Ҷеј•е…Ҙи¶ӢиҝӣеҫӢжҺ§еҲ¶зҡ„жҰӮеҝөпјҢиҝҷйҮҢйҮҮз”Ёзҡ„жҳҜжҢҮж•°и¶ӢиҝӣеҫӢпјҢе…¶е…·дҪ“еҪўејҸеҰӮдёӢ
еҸҜи§ҒпјҢеҪ“PMSMзҡ„дёүзӣёе®ҡеӯҗз”өжөҒзҡ„еҗҲжҲҗзҹўйҮҸisдёҺqиҪҙйҮҚеҗҲдё”жҢүз…§ејҸпјҲ10пјүдёӯIзҡ„规еҫӢеҸҳеҢ–ж—¶пјҢеҚіеҸҜдҪҝз”өжңәиҝҗиЎҢиҫҫеҲ°жҢҮд»ӨRпјҲtпјүи®ҫзҪ®зҡ„йў„жңҹж•ҲжһңгҖӮ
гҖҖгҖҖжӯӨеӨ–пјҢжұӮжҺ§еҲ¶йҮҸIж—¶пјҢжүҖйңҖзҡ„иҙҹиҪҪиҪ¬зҹ©еҖјеҸҜйҖҡиҝҮдёӢејҸиҝӣиЎҢеңЁзәҝдј°з®—

еҸӘиҰҒеҜ№з”өжөҒзҡ„жЈҖжөӢйў‘зҺҮиҫғй«ҳпјҢдё”еҸҠж—¶з”Ёдј°и®ЎеҮәзҡ„иҙҹиҪҪиҪ¬зҹ©еҺ»ж”№еҸҳжҺ§еҲ¶з”өжөҒзҡ„еҖјпјҢеҲҷеңЁиҪ¬еӯҗжғҜжҖ§дҪңз”ЁдёӢзі»з»ҹдәҰиғҪдҝқиҜҒиҪ¬йҖҹе’ҢдҪҚзҪ®еҫҲеҘҪзҡ„и·ҹиёӘжҢҮд»ӨеҸҳеҢ–гҖӮеҚіеҸҜдҝқиҜҒз”ұејҸпјҲ11пјүдј°и®ЎеҮәзҡ„иҪ¬зҹ©иғҪеӨҹз®—еҮәиҜҜе·®иҫғе°Ҹзҡ„жҺ§еҲ¶йҮҸIпјҢиҖҢиҜҘиҜҜе·®еҜ№ж•ҙдёӘжҺ§еҲ¶зі»з»ҹдёҚдјҡеёҰжқҘеҪұе“ҚжҲ–иҖ…иҜҙеҪұе“ҚеҫҲе°ҸгҖӮ

е®Ңе…Ёз”ұиҪ¬йҖҹжқҘзЎ®е®ҡпјҢеӣ жӯӨеңЁи°ғйҖҹзі»з»ҹдёӯеҸӘиҰҒжҢҮд»ӨnпјҠз»ҷе®ҡеҚіеҸҜпјӣеҗҢзҗҶпјҢеңЁдҪҚзҪ®дјәжңҚжҺ§еҲ¶зі»з»ҹдёӯз»ҷеҮәдҪҚзҪ®и§’жҢҮд»ӨдәҰеҸҜжҺЁеҮәиҪ¬йҖҹзҡ„еҸҳеҢ–规еҫӢгҖӮ
пјҲN0пјӢN1пјүдёәи°ғйҖҹеүҚйҖҹеәҰпјҢN0дёәи°ғйҖҹеҗҺйҖҹеәҰпјӣиӢҘN0пјқ0пјҢеҲҷеҜ№еә”еҲ¶еҠЁжғ…еҶөгҖӮеӣ жӯӨпјҢеҸӘиҰҒз»ҷе®ҡиө·еҠЁж—¶й—ҙгҖҒзЁіе®ҡиҝҗиЎҢж—¶й—ҙе’ҢйҖҹеәҰгҖҒи°ғйҖҹеҗҺйҖҹеәҰд»ҘеҸҠеҲ¶еҠЁж—¶й—ҙпјҢе°ұеҸҜеҫ—еҮәз”өжңәж•ҙдёӘиҝҗиЎҢдёӯеҗ„дёӘйҳ¶ж®өзҡ„йҖҹеәҰжҢҮд»Өr1пјҲtпјүпјҢеҶҚз»“еҗҲеҸҳз»“жһ„жҺ§еҲ¶зҗҶи®әеҸҜеҫ—еҮәжҺ§еҲ¶з”өжөҒзҡ„еҖјпјҢеҚіеҸҜе®һзҺ°з”өжңәеңЁеҗ„з§Қзү№е®ҡе“Қеә”жқЎд»¶дёӢзҡ„иө·еҠЁгҖҒиҝҗиЎҢгҖҒи°ғйҖҹе’ҢеҲ¶еҠЁгҖӮеҪ“然пјҢдәҰеҸҜдҪҝз”өжңәйҖҹеәҰжҢүе…¶д»–йў„жңҹзҡ„ж–№ејҸеҸҳеҢ–пјҢеҰӮзӣҙзәҝгҖҒжҠӣзү©зәҝзӯүпјҢиҝҷдәӣеңЁеҸҳз»“жһ„жҺ§еҲ¶дёӯйғҪеҸҜеҫҲж–№дҫҝең°йҖҡиҝҮи®ҫзҪ®йҖҹеәҰжҢҮд»ӨжқҘе®һзҺ°гҖӮгҖҖгҖҖ
4гҖҖзі»з»ҹд»ҝзңҹ
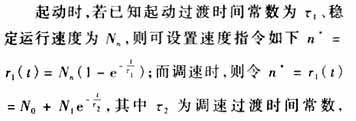
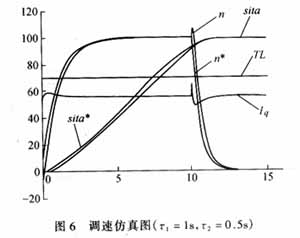
гҖҖгҖҖиӢҘз»ҷе®ҡеҸӮиҖғжҢҮд»ӨRпјҲtпјүпјҢеҲҷз»“еҗҲPMSMеңЁзЈҒй“ҫзҹўйҮҸе®ҡеҗ‘жҺ§еҲ¶ж—¶зҡ„зҠ¶жҖҒж–№зЁӢпјҲ7пјүгҖҒејҸпјҲ10пјүжүҖзӨәзҡ„жҺ§еҲ¶йҮҸе’ҢејҸпјҲ2пјүжүҖзӨәзҡ„еқҗж ҮеҸҳжҚўе…¬ејҸпјҢе°ұеҸҜз”ЁMATпјҚLABпјҸSIMULINKиҝӣиЎҢд»ҝзңҹгҖӮеӣҫ1е’Ңеӣҫ2дёәPMSMеңЁжҒ’е®ҡиҪ¬зҹ©дёӢиө·еҠЁгҖҒйўқе®ҡиҝҗиЎҢе’ҢеҲ¶еҠЁж—¶зҡ„иҪ¬йҖҹгҖҒдҪҚзҪ®е’Ңз”өжөҒзҡ„д»ҝзңҹз»“жһңпјӣеӣҫ3е’Ңеӣҫ4дёәPMSMеңЁжңүиҪ¬зҹ©жіўеҠЁжғ…еҶөдёӢиө·еҠЁгҖҒйўқе®ҡиҝҗиЎҢе’ҢеҲ¶еҠЁж—¶зҡ„иҪ¬йҖҹгҖҒдҪҚзҪ®е’Ңз”өжөҒзҡ„д»ҝзңҹз»“жһңпјӣеӣҫ5дёәжҒ’иҪ¬зҹ©иҙҹиҪҪж—¶з”өжңәиө·еҠЁе’ҢиҪ¬йҖҹи°ғиҠӮзҡ„д»ҝзңҹз»“жһңпјӣиҝҷдә”з§Қжғ…еҶөзҡ„иө·еҠЁиҝҮжёЎж—¶й—ҙеёёж•°еқҮдёәτ1пјқ0пјҺ5sпјҢиҖҢеҲ¶еҠЁжҲ–и°ғйҖҹиҝҮжёЎж—¶й—ҙеёёж•°еқҮдёәτ2пјқ1sпјӣеӣҫ6дёәиө·еҠЁиҝҮжёЎж—¶й—ҙеёёж•°дёә1sгҖҒеҲ¶еҠЁиҝҮжёЎж—¶й—ҙеёёж•°дёә0пјҺ5sж—¶зҡ„и°ғйҖҹд»ҝзңҹз»“жһңгҖӮеӣҫдёӯеёҰ“пјҠ”зҡ„йҮҸиЎЁзӨәз»ҷе®ҡзҡ„жҢҮд»ӨжӣІзәҝпјҢnдёәиҪ¬йҖҹпјҲеҚ•дҪҚпјҡrпјҸminпјүпјҢSitaдёәдҪҚзҪ®и§’пјҲеҚ•дҪҚпјҡеј§еәҰпјүпјҢIqдёәqиҪҙз”өжөҒеҖјпјҢIaгҖҒIbгҖҒIcеҲҶеҲ«дёәе®ҡеӯҗдёүзӣёз”өжөҒпјҲдёәеӣҫзӨәж–№дҫҝпјҢжүҖжңүз”өжөҒеҖјйғҪж”ҫеӨ§дәҶ10еҖҚпјҢеҚ•дҪҚAпјүпјҢTLд»ЈиЎЁиҪ¬зҹ©пјҲеҚ•дҪҚпјҡNmпјүгҖӮд»ҘдёҠеқҮи®ҫεпјқ0пјҺ1гҖҒkпјқ10пјҢз”ұеӣҫеҸҜи§Ғи·ҹиёӘиҜҜе·®иҫғе°ҸгҖӮеҶҚеҮҸе°ҸεжҲ–еўһеӨ§kпјҢи·ҹиёӘиҜҜе·®еҲҷжӣҙе°ҸгҖӮгҖҖгҖҖ
5гҖҖз»“жһңеҲҶжһҗ
гҖҖгҖҖд»ҝзңҹж—¶и®ҫзҪ®зҡ„зЁіе®ҡиҝҗиЎҢйҖҹеәҰдёә100rпјҸminпјҢиҝҷеҸҜдҪҝе®ҡеӯҗз”өжөҒе‘ЁжңҹиҫғеӨ§пјҲе®һйҷ…дёӯеҸҜд»»ж„ҸпјүпјҢз»ҷи®әж–Үдёӯзҡ„еӣҫиЎЁжҳҫзӨәеёҰжқҘж–№дҫҝгҖӮдёҠйқўжүҖжңүд»ҝзңҹйғҪжҳҜεпјқ0пјҺ1гҖҒkпјқ10ж—¶зҡ„з»“жһңпјҢд»ҺеӣҫдёӯеҸҜзңӢеҮәжӯӨж—¶зҡ„и·ҹиёӘиҜҜе·®дёҚжҳҜеҫҲеӨ§гҖӮеҰӮжһң继з»ӯеҮҸе°ҸεжҲ–еўһеӨ§kеҲҷи·ҹиёӘиҜҜе·®дјҡжӣҙе°ҸгҖӮеӣ жҺ§еҲ¶жҢҮд»ӨRпјҲtпјүдёӯеҗ«жҢҮж•°пјҢдјҡж¶үеҸҠеҲ°еҫҲеӨҡзҡ„жө®зӮ№иҝҗз®—пјҢе®ңйҮҮз”ЁDSPжқҘи®ҫи®ЎжҺ§еҲ¶зі»з»ҹпјҢдё”DSPиҝҗиЎҢйҖҹеәҰжһҒеҝ«пјҢиғҪеҮҶзЎ®ең°жЈҖжөӢеҮәеҗ„зһ¬й—ҙзҡ„з”өжөҒеҖјпјҢиҝҷж ·з”ЁејҸпјҲ11пјүдј°и®ЎеҮәзҡ„иҪ¬зҹ©иҜҜе·®жүҚдјҡеҫҲе°ҸпјҢеҸҜд»Һж•ҙдҪ“дёҠжҸҗй«ҳж•ҙдёӘи°ғйҖҹзі»з»ҹзҡ„жҖ§иғҪгҖӮ
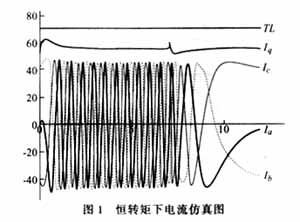
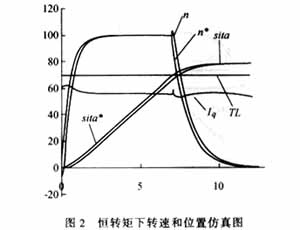
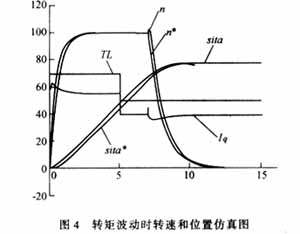
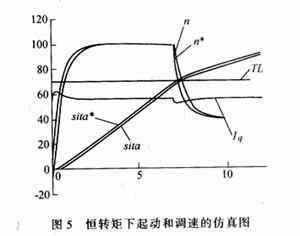
гҖҖгҖҖжҜ”иҫғеӣҫ2е’Ңеӣҫ5еҸҜзҹҘпјҢиҝҮжёЎж—¶й—ҙеёёж•°и¶Ҡе°ҸпјҢйҖҹеәҰе“Қеә”и¶Ҡеҝ«пјҢдҪҶжүҖйңҖз”өжөҒеҲҷи¶ҠеӨ§пјӣзі»з»ҹиҰҒжұӮз”өжөҒиғҪеӨҹеҝ«йҖҹе“Қеә”пјҢиҖҢеңЁд»ҝзңҹж—¶еҝҪз•ҘдәҶз”өж„ҹеҜ№з”өжөҒзҡ„еҪұе“ҚпјҢдҪҶеҰӮжһңйҮҮз”Ёиҝҗз®—йҖҹеәҰжһҒеҝ«зҡ„DSPжқҘжҺ§еҲ¶з”өжөҒеҸҳеҢ–пјҢеҲҷиҝҷз§Қиҝ‘дјјдёҚдјҡеёҰжқҘеҫҲеӨ§зҡ„иҜҜе·®пјӣз”ұеӣҫ3е’Ңеӣҫ4еҸҜзҹҘпјҢжңүиҪ¬зҹ©жіўеҠЁж—¶иҪ¬йҖҹд»ҚиғҪеҫҲеҘҪең°и·ҹиёӘжҢҮд»ӨеҖјеҸҳеҢ–иҖҢдёҚеҸ—еҲ°жҳҺжҳҫе№Іжү°пјҢеҚізі»з»ҹйІҒжЈ’жҖ§еҫҲеҘҪпјҢиҝҷеңЁеҸҳиҙҹиҪҪиҝҗиЎҢзҡ„и°ғйҖҹзі»з»ҹдёӯжңүеҫҲеӨ§зҡ„е®һз”Ёд»·еҖјпјӣдҪҝз”ЁеүҚйқўжүҖиҝ°зҡ„йҖҹеәҰжҢҮд»ӨиҝӣиЎҢи°ғйҖҹжҺ§еҲ¶дёҚдҪҶж–№дҫҝжҳ“иЎҢпјҢиҖҢдё”йҖҹеәҰеҸҳеҢ–е№іж»‘гҖӮеҗҢж—¶еҸӘиҰҒйҮҮйӣҶеҲ°зҡ„з”өжөҒе’ҢйҖҹеәҰдҝЎеҸ·еҮҶзЎ®пјҢеҚідҪҝз”өжңәжЁЎеһӢдёӯдҪҝз”Ёзҡ„еҸӮж•°дёҚеӨӘзІҫзЎ®(ж•°йҮҸзә§е’Ңе®һйҷ…еҖјзӣёеҪ“)пјҢж•ҙдёӘжҺ§еҲ¶зі»з»ҹд»ҚеҸҜйҖҡиҝҮиҮӘйҖӮеә”дҝ®ж”№жҺ§еҲ¶з”өжөҒзҡ„еҖјиҖҢе®һзҺ°иүҜеҘҪзҡ„и°ғйҖҹж•ҲжһңгҖӮ
еңЁиҪ¬еӯҗзЈҒй“ҫе®ҡеҗ‘жҺ§еҲ¶зҡ„ж°ёзЈҒеҗҢжӯҘз”өжңәи°ғйҖҹзі»з»ҹдёӯпјҢеј•е…ҘеҸҳз»“жһ„жҺ§еҲ¶зҗҶи®әпјҢеҸҜеӨ§еӨ§ж”№е–„зі»з»ҹзҡ„и°ғйҖҹжҖ§иғҪгҖӮиҝҷз§Қзі»з»ҹеә”з”ЁзҒөжҙ»пјҢж— и®әжҳҜиҪҜ件编зЁӢиҝҳжҳҜ硬件结жһ„йғҪжҜ”иҫғз®ҖеҚ•пјҢдё”зі»з»ҹйІҒжЈ’жҖ§еҫҲеҘҪпјҢеңЁд»ҘеҗҺзҡ„и°ғйҖҹдёӯе°Ҷдјҡеҫ—еҲ°е……еҲҶзҡ„еә”з”ЁгҖӮ
еҸӮиҖғж–ҮзҢ®
1 й«ҳдёәжҹ„.еҸҳз»“жһ„жҺ§еҲ¶зҗҶи®ә.дёӯеӣҪ科еӯҰжҠҖжңҜеҮәзүҲзӨҫпјҢ1990.оҖғ
2 з¬ҰжӣҰ.й«ҳзЈҒеңәж°ёзЈҒејҸз”өеҠЁжңәеҸҠе…¶й©ұеҠЁзі»з»ҹ.жңәжў°е·ҘдёҡеҮәзүҲзӨҫпјҢ1997.оҖғ
3 зҺӢй№°зӯү.ж°ёзЈҒж— еҲ·зӣҙжөҒз”өжңәдҪҚзҪ®дјәжңҚзі»з»ҹзҡ„еҸҳз»“жһ„жҺ§еҲ¶.еҫ®зү№з”өжңәпјҢ1998(1).
е…ҚиҙЈеЈ°жҳҺ/зүҲжқғз”іжҳҺ Passiontech
жүҖжңүж–Үз« дёәзҪ‘дёҠжҗңйӣҶжҲ–з§ҒдёӢдәӨжөҒеӯҰд№ д№Ӣз”ЁпјҢд»»дҪ•ж¶үеҸҠе•ҶдёҡзӣҲеҲ©зӣ®зҡ„еқҮдёҚеҫ—дҪҝз”ЁпјҢеҗҰеҲҷдә§з”ҹзҡ„дёҖеҲҮеҗҺжһңз”ұжӮЁиҮӘе·ұжүҝжӢ…!
жң¬з«ҷд»…д»…жҸҗдҫӣдёҖдёӘи§Ӯж‘©еӯҰд№ зҡ„зҺҜеўғпјҢе°ҶдёҚеҜ№д»»дҪ•иө„жәҗиҙҹжі•еҫӢиҙЈд»»гҖӮжүҖжңүиө„жәҗиҜ·еңЁдёӢиҪҪеҗҺ24е°Ҹж—¶еҶ…еҲ йҷӨгҖӮ
иӢҘж— ж„ҸдёӯдҫөзҠҜеҲ°жӮЁзҡ„зүҲжқғеҲ©зӣҠпјҢиҜ·жқҘдҝЎиҒ”зі»жҲ‘们пјҢжҲ‘们дјҡеңЁж”¶еҲ°дҝЎжҒҜдёүеӨ©еҶ…з»ҷдәҲеӨ„зҗҶ!
 收и—ҸзҒөзҢ«зҪ‘
收и—ҸзҒөзҢ«зҪ‘









