жұҪиҪҰECU ж Үе®ҡзі»з»ҹCCP иҪҜ件зҡ„е®һзҺ°
е…ій”®еӯ—пјҡCCP еҚҸи®® CAN жҖ»зәҝ ж Үе®ҡзі»з»ҹ
ж‘ҳиҰҒпјҡCCP еҚҸи®®жҳҜдёҖз§ҚCAN жҖ»зәҝж Үе®ҡеҢ№й…ҚеҚҸи®®гҖӮжң¬ж–Үз®ҖеҚ•д»Ӣз»ҚиҜҘеҚҸи®®зҡ„еҹәжң¬еҺҹзҗҶпјҢд»ҘеҸҠдёҖз§ҚеҹәдәҺиҜҘеҚҸи®®зҡ„жұҪиҪҰECU ж Үе®ҡзі»з»ҹзҡ„е®һзҺ°ж–№жі•гҖӮжңҖеҗҺпјҢз»“еҗҲMC9S12DP256 иҠҜзүҮд»ҘеҸҠμC/OS-IIж“ҚдҪңзі»з»ҹпјҢиҜҰз»Ҷи®Ёи®әдәҶжӯӨж Үе®ҡзі»з»ҹзҡ„CCP иҪҜ件е®һзҺ°ж–№жі•гҖӮ
1 еүҚиЁҖ
гҖҖгҖҖж Үе®ҡжҳҜжҢҮж №жҚ®ж•ҙиҪҰзҡ„еҗ„з§ҚжҖ§иғҪиҰҒжұӮ(еҰӮеҠЁеҠӣжҖ§гҖҒз»ҸжөҺжҖ§гҖҒжҺ’ж”ҫеҸҠиҫ…еҠ©еҠҹиғҪзӯү)пјҢжқҘи°ғж•ҙгҖҒдјҳеҢ–е’ҢзЎ®е®ҡж•ҙиҪҰдёҠеҗ„ECU(еҢ…жӢ¬еҸ‘еҠЁжңәе’Ңеҗ„еӯҗзі»з»ҹ ECU)зҡ„иҝҗиЎҢеҸҠжҺ§еҲ¶еҸӮж•°зҡ„жҺ§еҲ¶з®—жі•гҖӮйҖҡиҝҮж Үе®ҡзі»з»ҹпјҢиғҪеӨҹеҫҲж–№дҫҝзҡ„иҜ»еҸ– ECU дёӯзҡ„ж Үе®ҡеҸҳйҮҸж•°жҚ®еҲ°ж Үе®ҡе№іеҸ°пјҢ并еҸҜд»ҘеҜ№иҝҷдәӣж•°жҚ®иҝӣиЎҢзј–иҫ‘дҝ®ж”№пјҢзј–иҫ‘еҗҺзҡ„ж•°жҚ®еҸҲеҸҜд»ҘеҶҷе…Ҙ ECUпјҢд»ҺиҖҢиҫҫеҲ°дҝ®ж”№ ECU дёӯж Үе®ҡеҸӮж•°зҡ„зӣ®зҡ„гҖӮеҠҹиғҪе®Ңе–„дё”зҒөжҙ»ж–№дҫҝзҡ„ж Үе®ҡиҪҜ件еҜ№ж•ҙдёӘжұҪиҪҰECU жҺ§еҲ¶зі»з»ҹзҡ„ејҖеҸ‘иө·еҲ°дәӢеҚҠеҠҹеҖҚзҡ„ж•ҲжһңгҖӮзӣ®еүҚпјҢдёҖиҲ¬зҡ„ж Үе®ҡзі»з»ҹйғҪжҳҜйҮҮз”ЁеҹәдәҺдёІиЎҢеҸЈзҡ„зӮ№еҜ№зӮ№зҡ„йҖҡдҝЎж–№ејҸпјҢиҝҷз§ҚйҖҡдҝЎж–№ејҸе…·жңүеҫҲеӨ§зҡ„еұҖйҷҗжҖ§пјҢиҖҢдё”йҖҡдҝЎеҚҸи®®йғҪдёҚдёҖж ·гҖӮеңЁиҝҷдёӘECU зі»з»ҹдёӯпјҢе°ҶйҮҮз”Ё CAN жҖ»зәҝзҡ„йҖҡдҝЎж–№ејҸе’ҢCCP(CAN Calibration Protocol)еҚҸи®®гҖӮ
2 CCP еҚҸи®®з®Җд»Ӣ
гҖҖгҖҖ1996 е№ҙ6 жңҲпјҢ欧жҙІASAP йЎ№зӣ®з»„еҸ‘еёғдәҶзҺ°иЎҢзҡ„2.0 зүҲпјҢе®ғйҮҮз”ЁCAN 2.0B(11 дҪҚжҲ–29дҪҚID)иҝӣиЎҢMCS(measurement and calibration system)дёҺECU д№Ӣй—ҙзҡ„йҖҡдҝЎ[1]гҖӮиҜҘеҚҸи®®е…·жңүйҖҡз”ЁжҖ§ејәпјҢйҖӮз”ЁиҢғеӣҙе№ҝзҡ„зү№зӮ№пјҢж— и®әеҜ№8 дҪҚдҪҺйҖҹеёҰCAN зҡ„жҺ§еҲ¶еҷЁпјҢиҝҳжҳҜ32 дҪҚй«ҳйҖҹеёҰCAN зҡ„жҺ§еҲ¶еҷЁпјҢеқҮеҸҜж»Ўи¶іе·ҘдҪңиҰҒжұӮгҖӮеҹәдәҺCCP еҚҸи®®зҡ„ECU ж Үе®ҡйҮҮз”Ёдё»-д»ҺйҖҡдҝЎж–№ејҸпјҢдё»и®ҫеӨҮйҖҡиҝҮCAN жҖ»зәҝдёҺеӨҡдёӘд»Һи®ҫеӨҮзӣёиҝһпјҢе…¶дёӯдё»и®ҫеӨҮжҳҜжөӢйҮҸж Үе®ҡзі»з»ҹMCS(Measurement CalibrationSystem)пјҢд»Һи®ҫеӨҮжҳҜйңҖиҰҒж Үе®ҡзҡ„ECUгҖӮж №жҚ®CCP еҚҸи®®пјҢдё»и®ҫеӨҮйҰ–е…ҲдёҺе…¶дёӯдёҖдёӘд»Һи®ҫеӨҮе»әз«ӢйҖ»иҫ‘й“ҫжҺҘпјҢ е»әз«ӢйҖ»иҫ‘иҝһжҺҘеҗҺпјҢдё»гҖҒд»Һжңәд№Ӣй—ҙжүҖжңүзҡ„ж•°жҚ®дј йҖ’еқҮз”ұдё»жңәжҺ§еҲ¶пјҢд»Һжңәжү§иЎҢдё»жңәе‘Ҫд»ӨеҗҺиҝ”еӣһеҢ…еҗ«е‘Ҫд»Өе“Қеә”еҖјжҲ–й”ҷиҜҜд»Јз ҒзӯүдҝЎжҒҜзҡ„жҠҘж–ҮгҖӮ
3 ж Үе®ҡзі»з»ҹзҡ„е®һзҺ°
гҖҖгҖҖ3пјҺ1 дёҠдҪҚжңәйғЁеҲҶ
гҖҖгҖҖеҸӢеҘҪзҡ„дәәжңәйЎөйқўеҜ№дәҺж Үе®ҡе·ҘдҪңзҡ„йЎәеҲ©иҝӣиЎҢжҳҜиө·еҶіе®ҡжҖ§дҪңз”Ёзҡ„пјҢжӯӨж Үе®ҡзі»з»ҹзҡ„и®ҫи®Ўе…ӢжңҚдәҶд»ҘеҫҖеӨ§еӨҡж•°ж Үе®ҡзі»з»ҹеҸӘиғҪйҖҡиҝҮй”®зӣҳеҜ№ж Үе®ҡж•°жҚ®иҝӣиЎҢдҝ®ж”№зҡ„еұҖйҷҗжҖ§[2]пјҢеңЁж Үе®ҡзі»з»ҹдёӯйҷӨдәҶиЎЁж јзј–иҫ‘ж–№ејҸеӨ–пјҢиҝҳе°Ҷеј•е…ҘеӣҫеҪўзј–иҫ‘ж–№ејҸгҖӮе°Ҷж Үе®ҡеҸҳйҮҸж•°жҚ®иҪ¬жҚўжҲҗеӣҫеҪўпјҢе°ҶдҪҝж Үе®ҡе‘ҳеҜ№дәҺж Үе®ҡеҸҳйҮҸж•°жҚ®жҜ”еҰӮиҜҙдҝ®жӯЈжӣІзәҝе’Ң MAP еӣҫжңүдёҖдёӘжӣҙзӣҙи§ӮдәҶи§ЈпјҢ并且еҸҜд»ҘйҖҡиҝҮйј ж ҮжӢ–еҠЁеҜ№еӣҫеҪўиҝӣиЎҢзј–иҫ‘дҝ®ж”№пјҢд»ҺиҖҢиҫҫеҲ°зј–иҫ‘дҝ®ж”№ж Үе®ҡеҸҳйҮҸж•°жҚ®зҡ„зӣ®зҡ„пјҢиҝҷж ·еӨ§еӨ§ж–№дҫҝдәҶеҜ№дәҺдҝ®жӯЈжӣІзәҝе’Ң MAPеӣҫзұ»еһӢж Үе®ҡеҸҳйҮҸзҡ„зј–иҫ‘гҖӮ
гҖҖгҖҖеңЁиҝҷйҮҢжҲ‘们жҳҜйҮҮз”Ё Visual C++е®ҢжҲҗж Үе®ҡйЎөйқўзҡ„и®ҫи®Ўд»ҘеҸҠдёҺдёӢдҪҚжңәзҡ„йҖҡдҝЎгҖӮиҜҘж Үе®ҡзі»з»ҹйҷӨдәҶе…·жңүеҜ№ ECU зҡ„ж Үе®ҡеҠҹиғҪеӨ–пјҢиҝҳеј•е…ҘдәҶе®һж—¶зӣ‘жөӢеҠҹиғҪпјҢд»ҺиҖҢеҸҜд»ҘеҫҲеҝ«еҫ—еҲ°ж Үе®ҡж“ҚдҪңзҡ„иҝ”еӣһдҝЎжҒҜгҖӮеҰӮеӣҫжүҖзӨәпјҢзӣ‘жөӢз•Ңйқўдё»иҰҒе®ҢжҲҗеҗ„з§Қзӣ‘жөӢйҮҸж•°жҚ®зҡ„е®һж—¶жҺҘ收е’ҢжҳҫзӨәеҠҹиғҪгҖӮжөӢйҮҸеҫ—еҲ°зҡ„ж•°жҚ®д»Ҙж•°еӯ—е’ҢеӣҫеҪўдёӨз§Қж–№ејҸжҳҫзӨәеҮәжқҘпјҢж•°жҚ®еҸҜд»ҘеӯҳеӮЁгҖӮеҺҶеҸІж•°жҚ®еҸҜд»Ҙд»Һж–Ү件дёӯиҜ»еҮәжқҘпјҢиҝӣиЎҢзҰ»зәҝеҲҶжһҗгҖӮж Үе®ҡз•ҢйқўеҲҷжҳҜе®ҢжҲҗж Үе®ҡеҸҳйҮҸж•°жҚ®зҡ„жҳҫзӨәгҖҒзј–иҫ‘дҝ®ж”№д»ҘеҸҠдёҠдј дёӢиҪҪеҠҹиғҪгҖӮж №жҚ®еҸҳйҮҸзҡ„дёҚеҗҢзұ»еһӢпјҢеҸҳйҮҸж•°жҚ®еҲҶеҲ«д»ҘеҸӮйҮҸгҖҒдәҢз»ҙгҖҒдёүз»ҙзҡ„еҪўејҸиЎЁзӨәгҖӮ
еӣҫ 1 ж Үе®ҡзі»з»ҹе®һзҺ°еӣҫ
гҖҖгҖҖ3пјҺ2 еә•еұӮECU йғЁеҲҶ
гҖҖгҖҖиҖҢеә•еұӮ ECU йғЁеҲҶпјҢж Үе®ҡзі»з»ҹеңЁиҝҷйҮҢйҮҮз”Ёзҡ„жҳҜFreescale е…¬еҸёзҡ„MC9S12DP256пјҢиҝҷжҳҜдёҖж¬ҫ16 дҪҚCPU еҸҠ0.25 еҫ®зұігҖҒй«ҳйҖҹгҖҒй«ҳжҖ§иғҪ5.0V FLASH еӯҳеӮЁеҷЁжҠҖжңҜзҡ„дёӯжЎЈиҠҜзүҮгҖӮе®ғе…·жңү25MHzзҡ„дё»йў‘гҖҒ256K еӯ—иҠӮзҡ„FLASH еӯҳеӮЁеҷЁгҖҒ16 йҖҡйҒ“зҡ„8 дҪҚA/D иҪ¬жҚўеҷЁд»ҘеҸҠеӨҡиҫҫ5 дёӘзҡ„й«ҳйҖҹCAN жҺ§еҲ¶еҷЁгҖӮе…¶иҫғй«ҳзҡ„жҖ§иғҪд»·ж јжҜ”дҪҝе…¶йқһеёёйҖӮеҗҲз”ЁдәҺдёҖдәӣдёӯй«ҳжЎЈжұҪиҪҰз”өеӯҗзі»еҲ—зӣёе…ідә§е“ҒгҖӮеҗҢж—¶е…¶иҫғз®ҖеҚ•зҡ„иғҢжҷҜејҖеҸ‘жЁЎејҸ(BDM)дҪҝеҫ—ејҖеҸ‘жҲҗжң¬иҝӣдёҖжӯҘйҷҚдҪҺпјҢд№ҹдҪҝеҫ—зҺ°еңәејҖеҸ‘дёҺзі»з»ҹеҚҮзә§еҸҳеҫ—жӣҙеҠ ж–№дҫҝгҖӮ
гҖҖгҖҖйңҖиҰҒж Үе®ҡзҡ„еҸҳйҮҸз§°дёәж Үе®ҡеҸӮж•°,ж Үе®ҡе®ҡд№үд№ҹе°ұжҳҜдҝ®ж”№й©»жүҺеңЁECU еҶ…еӯҳдёӯзҡ„еҸҳйҮҸзҡ„еҶ…е®№гҖӮж №жҚ®ж Үе®ҡеҸӮж•°жүҖеңЁдёҚеҗҢең°еқҖз©әй—ҙ( RAMгҖҒFLASH жҲ–EEPROM) , иҝҷйҮҢд№ҹе°ұжңүдәҶдёҚеҗҢзҡ„ж Үе®ҡж–№жі•гҖӮRAM EEPROM ж Үе®ҡзҡ„йҖҹеәҰиҫғеқ—пјҢдҪҶRAM е’ҢEEPROM з©әй—ҙжңүйҷҗпјҢжүҖйңҖзҡ„ж Үе®ҡеҸӮж•°зҡ„ж•°зӣ®д№ҹе°ұеҸ—еҲ°дәҶйҷҗеҲ¶пјҢиҖҢFLASH з©әй—ҙиҫғеӨ§пјҢдҪҶж Үе®ҡзҡ„йҖҹеәҰзӣёеҜ№иҫғж…ўгҖӮиҝҷйҮҢиҖғиҷ‘йҖүжӢ©иҠҜзүҮзҡ„е®һйҷ…жғ…еҶөпјҢйҖүжӢ©дәҶFLASH ж Үе®ҡзҡ„ж–№жі•гҖӮеҪ“ж Үе®ҡеҸӮж•°йңҖиҰҒеӯҳж”ҫеңЁFLASH дёӯж—¶, еңЁECU дёҠз”өеҲқе§ӢеҢ–еҗҺ, зЁӢеәҸйҰ–е…Ҳе°Ҷж Үе®ҡеҸӮж•°зҡ„еҲқе§ӢеҖјеӨҚеҲ¶еҲ°RAM дёӯ, еңЁж Үе®ҡиҪҜ件дёӯиҜҘж®өз”ЁжқҘеӯҳж”ҫж Үе®ҡеҸӮж•°зҡ„RAM з§°дёәCalibration RAMгҖӮж Үе®ҡиҝҮзЁӢдёӯ, ж Үе®ҡиҪҜ件дҝ®ж”№Calibration RAM дёӯзҡ„еҸӮж•°еҖјгҖӮж Үе®ҡе…ЁйғЁз»“жқҹеҗҺ, еҶҚе°ҶиҜҘж®өRAM дёӯзҡ„еҶ…е®№еӨҚеҲ¶еӣһFLASH дёӯгҖӮ
4 иҪҜ件и®ҫи®Ў
гҖҖгҖҖж Үе®ҡзі»з»ҹзҡ„иҪҜ件и®ҫи®Ўдё»иҰҒеҲҶдёәдәҢдёӘйғЁеҲҶпјҡCAN Driver е’ҢCCP DriverпјҢиҖҢиҝҷдәҢдёӘйғЁеҲҶйғҪжҳҜеҹәдәҺμC/OS-II иҝҷз§Қе®һж—¶ж“ҚдҪңзі»з»ҹдёҠиҝҗиЎҢгҖӮз”ұдәҺECU иҝҷйҮҢйҮҮз”ЁйЈһжҖқеҚЎе°”зҡ„MC9S12DP256,еӣ жӯӨеҸҜд»ҘзӣҙжҺҘеә”з”ЁиҠҜзүҮCAN жЁЎеқ—жҸҗдҫӣзҡ„жҺҘеҸЈпјҢеҸ‘йҖҒCAN ж•°жҚ®гҖӮCCP Driver жҳҜж Үе®ҡзі»з»ҹзҡ„ж ёеҝғйғЁеҲҶпјҢе®ғдё»иҰҒжҳҜйҖҡиҝҮи°ғз”ЁCAN Driver е®һзҺ°дёҺдёҠдҪҚжңәж Үе®ҡиҪҜ件зҡ„йҖҡдҝЎпјҢд»ҺиҖҢиҝӣиЎҢеҜ№ECUзҡ„еңЁзәҝж Үе®ҡгҖӮ
гҖҖгҖҖ4пјҺ1 CAN Driver
гҖҖгҖҖеңЁиҝҷйҮҢжҲ‘们йҮҮз”Ёзҡ„жҳҜμC/OS-II иҝҷз§Қе®һж—¶ж“ҚдҪңзі»з»ҹпјҢдҪҶеңЁж Үе®ҡиҝҮзЁӢдёӯпјҢжҲ‘们еӨ„зҗҶзҡ„ж•°жҚ®йҮҸеҫҲеӨ§пјҢйҖҡдҝЎйҖҹеәҰд№ҹеҫҲеҝ«пјҢCAN жҺҘ收еҲ°дёҖжқЎж¶ҲжҒҜе°ұдә§з”ҹдёҖж¬Ўдёӯж–ӯпјҢдёӯж–ӯжңҚеҠЎеӯҗзЁӢеәҸпјҢжҜҸж¬Ўдёӯж–ӯйғҪиҰҒеј•иө·дёҖж¬Ўд»»еҠЎи°ғеәҰгҖӮCPU еӨ§йҮҸзҡ„ж—¶й—ҙиҠұеңЁд»»еҠЎеҲҮжҚўдёҠпјҢиӢҘCPU иҝҳйңҖеӨ„зҗҶе…¶д»–дәӢ件пјҢеҲҷеҸҜиғҪеҮәзҺ°жҺҘ收缓еҶІеҜ„еӯҳеҷЁжҺҘ收жәўеҮәзҡ„й”ҷиҜҜпјҢйҖ жҲҗж•°жҚ®дёўеӨұгҖӮеӣ жӯӨпјҢеңЁиҝҷйҮҢйҮҮз”ЁдёҖз§ҚеҹәдәҺзҺҜеҪўзј“еҶІеҢәзҡ„ж–№ејҸжқҘе®һзҺ°CAN DriverгҖӮж•ҙдёӘCAN Driver з”ұдёӯж–ӯеӨ„зҗҶзЁӢеәҸе’Ңеә•еұӮй©ұеҠЁжЁЎеқ—з»„жҲҗгҖӮдёӯж–ӯеӨ„зҗҶзЁӢеәҸеңЁжҜҸж¬ЎCAN жҺ§еҲ¶еҷЁе®ҢжҲҗ收еҸ‘ж—¶пјҢе”ӨйҶ’й©ұеҠЁзЁӢеәҸпјҢиҝӣиЎҢдёӢдёҖжӯҘе·ҘдҪңпјҢи®ҫеӨҮзӣёе…ізЁӢеәҸйҖҡиҝҮеҜ№CAN жҺ§еҲ¶еҷЁеҜ„еӯҳеҷЁзҡ„иҜ»еҶҷпјҢе®ҢжҲҗеҜ№CAN з«ҜеҸЈзҡ„й…ҚзҪ®е’ҢзҠ¶жҖҒжЈҖжөӢзӯүе·ҘдҪңпјҢеҗҢж—¶дёәи®ҫеӨҮж— е…іиҪҜ件е’Ңз”ЁжҲ·зЁӢеәҸжҸҗдҫӣжҺҘеҸЈгҖӮиҖҢеә•еұӮй©ұеҠЁжЁЎеқ—еҲҷдё»иҰҒд»»еҠЎжҳҜз»“еҗҲ收еҸ‘ж¶ҲжҒҜзј“еҶІеҢәпјҢдёәеә”з”ЁзЁӢеәҸжҸҗдҫӣдәҶжҺҘ收е’ҢеҸ‘йҖҒж¶ҲжҒҜзҡ„жҺҘеҸЈеҮҪж•°гҖӮ
(жң¬ж–ҮиҪ¬иҮӘз”өеӯҗе·ҘзЁӢдё–з•Ңпјҡhttp://www.eeworld.com.cn/qcdz/2010/0717/article_2293_1.html)
пјҲ1пјүдёӯж–ӯеӨ„зҗҶзЁӢеәҸ
гҖҖгҖҖдёӯж–ӯзә§зЁӢеәҸзҡ„зЁӢеәҸжөҒзЁӢеӣҫеҰӮеӣҫ 2 жүҖзӨәгҖӮйҰ–е…Ҳж №жҚ®дёҚеҗҢзҡ„дёӯж–ӯзұ»еҲ«иҝӣе…ҘдёҚеҗҢзҡ„дёӯж–ӯзә§зЁӢеәҸгҖӮиӢҘдёәжҺҘ收е®ҢжҲҗдёӯж–ӯпјҢеҲҷжё…йҷӨдёӯж–ӯжәҗпјҢе°ҶжҺҘ收еҲ°зҡ„ж¶ҲжҒҜж”ҫе…ҘжҺҘ收缓еҶІеҢәпјӣе°ҶиҜҘж¶ҲжҒҜеӯҳе…ҘжҺҘ收缓еҶІеҢәеӯҳе…ҘжҢҮй’ҲжүҖжҢҮеҗ‘зҡ„ең°еқҖпјҢе°ҶиҜҘжҢҮй’Ҳеҗ‘дёӢ移еҠЁпјҢжҺҘ收缓еҶІеҢәи®Ўж•°еҷЁеҠ 1пјҢ并еҸ‘еҮәдҝЎеҸ·йҮҸйҖҡзҹҘеә”з”ЁзЁӢеәҸжңүж–°зҡ„ж¶ҲжҒҜе·Із»ҸжҺҘ收еҲ°пјҢиӢҘжңүд»»еҠЎжӯЈеңЁзӯүеҫ…CAN дёҠзҡ„ж–°ж¶ҲжҒҜпјҢеҲҷиҜҘд»»еҠЎиҝӣе…Ҙе°ұз»ӘзҠ¶жҖҒзӯүеҫ…OS зҡ„и°ғеәҰгҖӮ
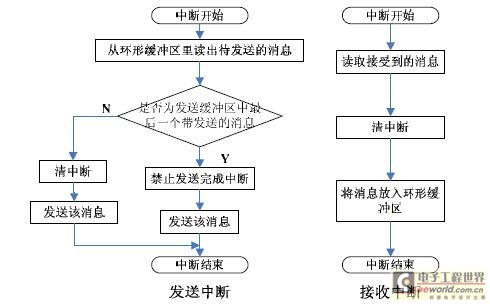
еӣҫ2 дёӯж–ӯзә§зЁӢеәҸзҡ„зЁӢеәҸжөҒзЁӢеӣҫ
гҖҖгҖҖиӢҘдёәеҸ‘йҖҒе®ҢжҲҗдёӯж–ӯпјҢеҲҷе°ҶеҸ‘йҖҒзј“еҶІеҢәзҡ„еҫ…еҸ‘йҖҒж¶ҲжҒҜиҜ»еҮәпјӣе°Ҷжңүеҫ…еҸ‘йҖҒж¶ҲжҒҜдё”дјҳе…Ҳзә§жңҖй«ҳзҡ„дёҖдёӘдёӯиҜ»еҸ–жңҖж—§зҡ„ж¶ҲжҒҜпјҢеҸ‘йҖҒзј“еҶІеҢәи®Ўж•°еҷЁеҮҸ1пјҢеҸ‘еҮәдҝЎеҸ·йҮҸйҖҡзҹҘеә”з”ЁзЁӢеәҸжңүдёҖдёӘж¶ҲжҒҜиў«еҸ‘еҮәпјҢ并жұҮжҠҘеҪ“еүҚеҸ‘йҖҒзј“еҶІеҢәзҡ„зҠ¶жҖҒпјӣиҝҳеә”еҲӨж–ӯжҳҜеҗҰдёәжңҖеҗҺдёҖдёӘеҫ…еҸ‘йҖҒзҡ„ж¶ҲжҒҜпјҢиӢҘдёҚжҳҜпјҢеҲҷжё…йҷӨдёӯж–ӯжәҗ并е°Ҷж¶ҲжҒҜеҸ‘йҖҒеҲ°жҖ»зәҝдёҠпјҢиӢҘжҳҜжңҖеҗҺдёҖдёӘпјҢеҲҷзҰҒжӯўеҸ‘йҖҒе®ҢжҲҗдёӯж–ӯеҗҺеҸ‘йҖҒиҜҘж¶ҲжҒҜпјҢе°ҶиҝҷдёӘеҸ‘йҖҒе®ҢжҲҗдёӯж–ӯдҝқз•ҷеҲ°еә”з”ЁзЁӢеәҸдёӢдёҖж¬ЎеҸ‘йҖҒж¶ҲжҒҜзҡ„ж—¶еҖҷе…Ғ许并дә§з”ҹгҖӮ
гҖҖгҖҖпјҲ2пјүеә•еұӮй©ұеҠЁжЁЎеқ—
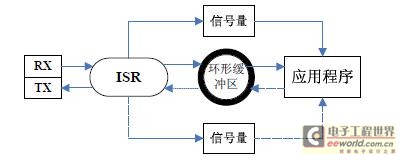
гҖҖгҖҖеә•еұӮй©ұеҠЁжЁЎеқ—дё»иҰҒжҳҜдёәеә”з”ЁзЁӢеәҸжҸҗдҫӣдәҶжҺҘ收е’ҢеҸ‘йҖҒж¶ҲжҒҜзҡ„жҺҘеҸЈеҮҪж•°гҖӮеҪ“жҺҘ收ж¶ҲжҒҜж—¶[4]пјҢеҰӮеӣҫ3 е®һзәҝжүҖзӨәпјҢеә”з”ЁзЁӢеәҸеңЁдҝЎеҸ·йҮҸеӨ„зӯүеҫ…пјӣ收еҲ°дёҖдёӘж¶ҲжҒҜеҗҺпјҢISRд»ҺдёІиЎҢз«ҜеҸЈиҜ»е…Ҙж¶ҲжҒҜпјҢе°Ҷе…¶еӯҳе…ҘзҺҜзҠ¶зј“еҶІеҢәгҖӮ然еҗҺISR еҸ‘еҮәдҝЎеҸ·йҮҸпјҢйҖҡзҹҘеңЁзӯүеҫ…дёІеҸЈж•°жҚ®зҡ„д»»еҠЎе·Іж”¶еҲ°дёҖдёӘж¶ҲжҒҜгҖӮзӯүеҫ…д»»еҠЎж”¶еҲ°дҝЎеҸ·йҮҸеҗҺпјҢиҝӣе…Ҙе°ұз»ӘзҠ¶жҖҒпјҢеҮҶеӨҮиў«OS и°ғеәҰеҷЁжҝҖжҙ»гҖӮеҪ“еҶ…ж ёи°ғеәҰиҜҘд»»еҠЎиҝҗиЎҢж—¶пјҢиҜҘд»»еҠЎд»ҺзҺҜзҠ¶зј“еҶІеҢәдёӯеҸ–еҮәж¶ҲжҒҜпјҢе®ҢжҲҗжҺҘ收ж¶ҲжҒҜзҡ„иҝҮзЁӢгҖӮ
еӣҫ3 зј“еҶІеҢәжҺҘ收еҸ‘йҖҒж¶ҲжҒҜ
гҖҖгҖҖеҸ‘йҖҒж¶ҲжҒҜзҡ„ж–№жі•еҰӮеӣҫ3 иҷҡзәҝжүҖзӨәгҖӮеҪ“еҸ‘йҖҒзҺҜзҠ¶зј“еҶІеҢәе·Іж»Ўж—¶пјҢдҝЎеҸ·йҮҸдҪңдёәжҢҮзӨәпјҢжҡӮеҒңеҸ‘йҖҒд»»еҠЎгҖӮдёәеҸ‘йҖҒж¶ҲжҒҜпјҢд»»еҠЎзӯүеҫ…дҝЎеҸ·йҮҸгҖӮеҰӮжһңзҺҜзҠ¶зј“еҶІеҢәжңӘж»ЎпјҢеҲҷд»»еҠЎз»§з»ӯеҗ‘зҺҜзҠ¶зј“еҶІеҢәеӯҳеӮЁж¬ІеҸ‘йҖҒзҡ„ж¶ҲжҒҜгҖӮеҰӮжһңеӯҳеӮЁзҡ„ж¶ҲжҒҜжҳҜзј“еҶІеҢәзҡ„第дёҖдёӘеӯ—иҠӮпјҢеҲҷеҸ‘йҖҒдёӯж–ӯе…Ғи®ёпјҢдёӯж–ӯзЁӢеәҸеҮҶеӨҮеҗҜеҠЁгҖӮCAN еҸ‘йҖҒISR д»ҺзҺҜиЎҢзј“еҶІеҢәдёӯеҸ–еҮәжңҖж—§зҡ„ж¶ҲжҒҜпјҢеҗҢж—¶еҸ‘йҖҒдҝЎеҸ·йҮҸпјҢйҖҡзҹҘеҸ‘йҖҒд»»еҠЎпјҢиЎЁжҳҺзҺҜзҠ¶зј“еҶІеҢәжңүз©әй—ҙжҺҘ收еҸҰеӨ–зҡ„ж¶ҲжҒҜгҖӮжҺҘзқҖISR е°Ҷж¶ҲжҒҜд»ҺCAN з«ҜеҸЈеҸ‘йҖҒеҲ°жҖ»зәҝдёҠгҖӮ
гҖҖ4пјҺ2 CCP Driver
еҹәдәҺе®һж—¶ж“ҚдҪңзі»з»ҹзҡ„CCP DriverпјҢж Үе®ҡзі»з»ҹеңЁиҝҷйҮҢжҳҜйҖҡиҝҮCommand еӨ„зҗҶжңәе’ҢDAQ еӨ„зҗҶжңәдёӨйғЁеҲҶжқҘе®һзҺ°зҡ„гҖӮ
Command еӨ„зҗҶжңәз”ұдёҖдёӘзі»з»ҹд»»еҠЎжқҘе®ҢжҲҗ[5]гҖӮиҜҘд»»еҠЎеңЁOS еҲқе§ӢеҢ–еҗҺе°ұеҗҜеҠЁиҝҗиЎҢпјҢиҜҶеҲ«CAN зҪ‘з»ңдёҠзҡ„CCP дё»и®ҫеӨҮеҸ‘йҖҒз»ҷиҜҘд»Һи®ҫеӨҮзҡ„дјҡиҜқе‘Ҫд»ӨгҖӮж №жҚ®е‘Ҫд»ӨеҒҡзӣёеә”еҠЁдҪңпјҢ并еӣһйҖҒе‘Ҫд»Өеә”зӯ”пјҢе®ҢжҲҗдјҡиҜқгҖӮDAQ еӨ„зҗҶжңәз”ұ1пҪһn дёӘзі»з»ҹд»»еҠЎжқҘе®ҢжҲҗгҖӮжң¬йЎ№зӣ®ж”ҜжҢҒеҜ№дёҚеҗҢж—¶й—ҙиҰҒжұӮзҡ„зӣ‘и§ҶеҸӮж•°и®ҫе®ҡдёҚеҗҢзҡ„DAQ е‘ЁжңҹпјҢдёҚеҗҢж—¶й—ҙиҰҒжұӮзҡ„зӣ‘и§ҶеҸӮж•°еЎ«е…ҘдёҚеҗҢзҡ„DAQ_ListпјҢжҜҸдёӘDAQ_List з”ұдёҖдёӘд»»еҠЎе®ҢжҲҗе‘ЁжңҹеҸ‘йҖҒгҖӮ
гҖҖгҖҖCommand еӨ„зҗҶжңәеңЁж”¶еҲ°дё»и®ҫеӨҮиҰҒжұӮеҗҜеҠЁжҹҗDAQ_List е‘Ҫд»Өж—¶пјҢ и°ғз”ЁOS еҮҪж•°OSTaskCreate()еҗҜеҠЁзӣёеә”зҡ„д»»еҠЎпјҢиҜҘд»»еҠЎжҜҸе®ҢжҲҗдёҖж¬ЎеҸ‘йҖҒе°ұи°ғз”ЁOS еҮҪж•°OSTimeDlyHMSM( )жҢӮиө·дёҖе®ҡзҡ„ж—¶й—ҙпјҢиҝҷдёӘж—¶й—ҙе°ұжҳҜдё»и®ҫеӨҮеҜ№иҝҷдёӘDAQ_List иҰҒжұӮзҡ„еҸ‘йҖҒе‘ЁжңҹгҖӮеңЁж”¶еҲ°дё»и®ҫеӨҮиҰҒжұӮеҒңжӯўжҹҗDAQ_List е‘Ҫд»Өж—¶пјҢи°ғз”ЁOS еҮҪж•°OSTaskDel( )еҮҪж•°еҲ йҷӨиҜҘд»»еҠЎгҖӮ
гҖҖгҖҖпјҲ1пјүCommand еӨ„зҗҶжңә
гҖҖгҖҖCommand еӨ„зҗҶжңәдё»иҰҒжҳҜиҺ·еҸ–并解иҜ»дё»и®ҫеӨҮзҡ„CCP е‘Ҫд»ӨпјҢ并жү§иЎҢиҜҘе‘Ҫд»Өпјӣе‘Ҫд»Өжү§иЎҢе®ҢжҲҗеҗҺпјҢеҗ‘дё»и®ҫеӨҮеҸ‘йҖҒеә”зӯ”пјӣиӢҘжү§иЎҢж—¶еҮәй”ҷпјҢеә”зӯ”дёӯеҗ‘дё»и®ҫеӨҮжҠҘй”ҷпјӣиӢҘдё»и®ҫеӨҮе‘Ҫд»ӨиҰҒжұӮеҜ№DAQиҝӣиЎҢж“ҚдҪңпјҢеҲҷе°ҶиҜҘж“ҚдҪңдј иҫҫз»ҷDAQ еӨ„зҗҶжңәпјҢз”ұDAQ еӨ„зҗҶжңәе®ҢжҲҗDAQ ж“ҚдҪңгҖӮ
гҖҖгҖҖCommand еӨ„зҗҶжңәз”ұдёҖдёӘRTOS д»»еҠЎжқҘе®ҢжҲҗпјҢе…¶зӨәж„ҸжҖ§д»Јз ҒеҰӮдёӢпјҢGetMsg еҮҪж•°дёәCAN й©ұеҠЁзЁӢеәҸзҡ„жҺҘ收ж¶ҲжҒҜеҮҪж•°пјҢи°ғз”ЁжӯӨеҮҪж•°еҲҷзӯүеҫ…иҺ·еҸ–CAN з«ҜеҸЈжҺҘ收еҲ°зҡ„ж¶ҲжҒҜеё§гҖӮдёҖж—ҰжҺҘ收еҲ°ж–°зҡ„ж¶ҲжҒҜеё§еҲҷеҮҪж•°иҝ”еӣһпјҢз”ЁжҲ·еҸҜйҖҡиҝҮ&msg_command иҺ·еҸ–иҜҘж¶ҲжҒҜеё§зҡ„еҶ…е®№гҖӮ
гҖҖгҖҖvoid task (void * data) {
гҖҖгҖҖfor( ; ; ) {
гҖҖгҖҖGetMsg(&msg_command); //зӯүеҫ…并иҺ·еҸ–дёҖдёӘCCP е‘Ҫд»Ө
гҖҖгҖҖCCP_Command (&msg_command); //е°Ҷе‘Ҫд»ӨйҖҒз»ҷCCP е‘Ҫд»ӨеӨ„зҗҶеҮҪж•°
гҖҖгҖҖ}
}
пјҲ2пјүDAQ еӨ„зҗҶжңә
гҖҖгҖҖDAQ еӨ„зҗҶжңәзҡ„д»»еҠЎжҳҜж №жҚ®дё»и®ҫеӨҮзҡ„йңҖиҰҒпјҢе®ҡж—¶еҗ‘CAN жҖ»зәҝдёҠеҸ‘йҖҒDAQ ж•°жҚ®гҖӮе®ғз”ұеҗҜеҠЁд»Һи®ҫеӨҮзҡ„DAQ еҸ‘йҖҒгҖҒеҒңжӯўд»Һи®ҫеӨҮзҡ„DAQ еҸ‘йҖҒгҖҒжү§иЎҢDAQ еҫӘзҺҜеҸ‘йҖҒзҡ„д»»еҠЎ3 дёӘйғЁеҲҶжһ„жҲҗгҖӮ
гҖҖгҖҖеҗҜеҠЁжҲ–еҒңжӯўд»Һи®ҫеӨҮзҡ„ DAQ еҸ‘йҖҒпјҢз”ұCommand еӨ„зҗҶжңәи°ғз”ЁеҮҪж•°Start_DAQ (DAQ List
number ,)е’ҢStop_DAQ (DAQ List number)жқҘе®ҢжҲҗпјҢиҜҘеҮҪж•°еҗҜеҠЁжҲ–еҒңжӯўзӣёеә”зҡ„DAQ еҸ‘йҖҒд»»еҠЎпјҢ
е…¶зӨәж„ҸжҖ§д»Јз ҒеҰӮдёӢпјҡ
гҖҖгҖҖStart_DAQ(INT8U DAQ_List_num) { //еҗҜеҠЁз¬¬n дёӘDAQ_List
гҖҖгҖҖDAQ_List[n].Started = 1;
гҖҖгҖҖDAQ_List[n].Prepared = 1;
гҖҖгҖҖOSTaskCreate (第n дёӘDAQ_List зҡ„д»»еҠЎ); //и°ғз”Ёзі»з»ҹеҮҪж•°пјҢеҲӣе»әDAQ еҸ‘йҖҒд»»еҠЎпјҢ
гҖҖгҖҖ并дҪҝд»»еҠЎиҝӣе…Ҙи°ғеәҰ
гҖҖгҖҖ}}
гҖҖгҖҖStop_DAQ(INT8U DAQ_List_num) { //еҒңжӯўз¬¬n дёӘDAQ_List
гҖҖгҖҖDAQ_List[n].Started = 0;
гҖҖгҖҖDAQ_List[n].Prepared = 0;
гҖҖгҖҖOSTaskDel (第n дёӘDAQ_List зҡ„д»»еҠЎ); //и°ғз”Ёзі»з»ҹеҮҪж•°пјҢеҲ йҷӨDAQ еҸ‘йҖҒд»»еҠЎ
гҖҖгҖҖ}
гҖҖгҖҖжү§иЎҢDAQ еҫӘзҺҜеҸ‘йҖҒзҡ„д»»еҠЎпјҢйңҖиҰҒжҢүз…§ODT и®ҫзҪ®жҠҠDAQ ж•°жҚ®еҸ‘йҖҒеҲ°CAN жҖ»зәҝдёҠпјҢеҗҢж—¶йңҖиҰҒжҢүз…§DAQ е‘ЁжңҹиҰҒжұӮеҫӘзҺҜжү§иЎҢпјҢиҜҘд»»еҠЎзӨәж„ҸжҖ§д»Јз ҒеҰӮдёӢпјҡ
гҖҖгҖҖvoid DAQ_task ( ) {
гҖҖгҖҖfor( ; ; ) {
гҖҖгҖҖCCP.Upload(0); //ж №жҚ®ODT и®ҫзҪ®жҠҠDAQ ж•°жҚ®еҸ‘йҖҒеҲ°CAN жҖ»зәҝдёҠ
гҖҖгҖҖOSTimeDlyHMSM(Period); //и°ғз”ЁRTOS еҮҪж•°пјҢзӯүеҫ…дёҖдёӘе‘Ёжңҹзҡ„ж—¶й—ҙ
гҖҖгҖҖ}
гҖҖгҖҖ}
5 з»“жқҹиҜӯ
гҖҖгҖҖз»ҸиҝҮеӨҡж¬ЎеҸҚеӨҚдёҚж–ӯзҡ„е®һйҷ…и°ғиҜ•пјҢжӯӨ CCP иҪҜ件зЁӢеәҸеңЁзі»з»ҹдёҠиҝҗиЎҢзЁіе®ҡеҸҜйқ пјҢе®һзҺ°дәҶеҹәдәҺMC9S12DP256 дёҠзҡ„FLASH еҢәзҡ„ж Үе®ҡгҖӮ
гҖҖгҖҖиҝҷз§ҚйҮҮз”ЁзҺҜеҪўзј“еҶІеҢәд»ҘеҸҠз»“еҗҲе®һж—¶ж“ҚдҪңзі»з»ҹзҡ„ CCP иҪҜ件зЁӢеәҸи®ҫи®ЎпјҢжңүж•Ҳзҡ„йҒҝе…ҚеңЁECUж Үе®ҡиҝҮзЁӢдёӯж•°жҚ®зҡ„дёўеӨұпјҢ并еҸҜд»ҘеҜ№еӨҡдёӘECU еҗҢж—¶иҝӣиЎҢеңЁзәҝж Үе®ҡпјҢе…·жңүеҫҲејәзҡ„е®һз”Ёд»·еҖјгҖӮ
е…ҚиҙЈеЈ°жҳҺ/зүҲжқғз”іжҳҺ Passiontech
жүҖжңүж–Үз« дёәзҪ‘дёҠжҗңйӣҶжҲ–з§ҒдёӢдәӨжөҒеӯҰд№ д№Ӣз”ЁпјҢд»»дҪ•ж¶үеҸҠе•ҶдёҡзӣҲеҲ©зӣ®зҡ„еқҮдёҚеҫ—дҪҝз”ЁпјҢеҗҰеҲҷдә§з”ҹзҡ„дёҖеҲҮеҗҺжһңз”ұжӮЁиҮӘе·ұжүҝжӢ…!
жң¬з«ҷд»…д»…жҸҗдҫӣдёҖдёӘи§Ӯж‘©еӯҰд№ зҡ„зҺҜеўғпјҢе°ҶдёҚеҜ№д»»дҪ•иө„жәҗиҙҹжі•еҫӢиҙЈд»»гҖӮжүҖжңүиө„жәҗиҜ·еңЁдёӢиҪҪеҗҺ24е°Ҹж—¶еҶ…еҲ йҷӨгҖӮ
иӢҘж— ж„ҸдёӯдҫөзҠҜеҲ°жӮЁзҡ„зүҲжқғеҲ©зӣҠпјҢиҜ·жқҘдҝЎиҒ”зі»жҲ‘们пјҢжҲ‘们дјҡеңЁж”¶еҲ°дҝЎжҒҜдёүеӨ©еҶ…з»ҷдәҲеӨ„зҗҶ!
 收и—ҸзҒөзҢ«зҪ‘
收и—ҸзҒөзҢ«зҪ‘











